1.本发明涉及医疗用品领域,尤其涉及一种智能助行装置。
背景技术:
2.康复期患者需要多走动训练才能有利于康复,因病房面积有限,通常会让患者在走廊处行走锻炼,但患者需要家属或医护人员扶行,没有扶行有摔倒的风险,如果家属不在或者医护人员工作繁忙,会使患者不能得到充分的训练。因此,需设计一种智能助行装置,以改善前述缺陷。
技术实现要素:
3.本发明的目的是提供一种智能助行装置,能让患者自行得到充分的训练,有利于康复。
4.为实现上述目的,本发明提供一种智能助行装置,包括手环,安装于医院病房走廊处墙上的导轨滑块结构、传动装置、驱动装置、控制装置,以及安装于导轨滑块结构的滑块上的可拆卸的助行器,手环上贴有可撕除的患者信息标识,手环与控制装置无线通讯并使驱动装置通过传动装置联动助行器由停放处沿导轨滑块结构的导轨移动至靠近病房处,助行器包括可开合的腰环,腰环的两侧安装有可伸缩的支撑脚,支撑脚的下端安装有轮子,腰环内侧有可相向移动靠拢紧箍腰部和反向移动远离释放腰部的腰部箍件以及可升降的腋撑,腰环处还安装有位于腰部箍件的下方的可拉紧和放松且可拆卸的防摔件。
5.作为本发明的进一步改进,所述腰环为内部空心的圆环,腰环的左侧或右侧安装于导轨滑块结构的滑块上,腰环的前侧左右位置分别固定有对称的扶手,腰环的后侧有开口,腰环在开口的两边分别安装有一个可缩入腰环内和伸出腰环外的伸缩件,开口两边的伸缩件在伸出腰环外时相互对接固定。
6.作为本发明的更进一步改进,所述开口一边的伸缩件端面外凸有对接部,开口另一边的伸缩件的端面内凹并且在内凹处有磁铁一,对接部伸入开口另一边的伸缩件内并吸附固定在磁铁一上,腰环在开口的两边分别沿腰环圆周方向开有一滑槽,各滑槽内有一拨动件,各拨动件的内端与相应伸缩件固定连接。
7.作为本发明的更进一步改进,所述腰环的左右两侧朝外延伸有对称的延伸板,各延伸板底部固定有两个所述支撑脚,各延伸板顶部安装有一气缸一,各气缸一连接有一推杆一,各推杆一贯穿腰环与腰环内侧的腰部箍件连接,腰环一侧的延伸板与导轨滑块结构的滑块可拆卸连接。
8.作为本发明的更进一步改进,所述腋撑包括两个骨架和包裹各骨架的弧形气囊一,骨架处安装有电机一,电机一的输出轴连接有螺杆一,弧形气囊一在电机一、电机一的输出轴和螺杆一的位置有让位槽,螺杆一的下端向下垂直贯穿安装在推杆一处。
9.作为本发明的更进一步改进,所述腰部箍件包括两个弧形气囊二和两个弧形固定件,弧形气囊中部宽度大于两端宽度,各弧形气囊固定在相应弧形固定件内侧,各弧形固定
件的外侧与相应推杆连接,各弧形固定件的底部靠腰环后侧的位置固定有挂环。
10.作为本发明的更进一步改进,所述防摔件包括三角结构的撑托部,撑托部的三个角分别有连接带,撑托部的一个连接带朝腰环前侧、另两个连接带朝腰环后侧,撑托部朝腰环后侧的两个连接带分别可拆卸连接有一伸缩带,腰环底部安装有收卷各伸缩带和撑托部朝腰环前侧的连接带的电动收卷装置,两个伸缩带于拆卸时挂于挂环处。
11.作为本发明的更进一步改进,所述电动收卷装置包括外壳、安装于外壳内的电机二和卷轴,卷轴与电机二的输出轴相连,外壳的侧面开有开口,伸缩带穿过开口伸入外壳内固定在卷轴上并且能被卷轴收卷;两个伸缩带的末端固定有连接扣,撑托部朝腰环后侧的两个连接带穿过相应连接扣后反折并可拆卸固定在撑托部的底面。
12.作为本发明的更进一步改进,各所述延伸板上开有连接孔一和连接孔二,连接孔一位于连接孔二的两边,导轨滑块结构的滑块上开有连接孔三,腰环一侧的延伸板上的连接孔一和连接孔三通过螺栓连接,传动装置是丝杆螺母结构,驱动装置是电机三,电机三的输出轴与丝杆螺母结构的丝杆连接,丝杆螺母结构的螺母上开有连接孔四和限位孔,与导轨滑块结构的滑块可拆卸连接的延伸板上的连接孔二通过推杆二与螺母上的连接孔四可拆卸连接,推杆二的上端连接有安装在螺母上的气缸二。
13.作为本发明的更进一步改进,所述支撑脚包括固定在延伸板底面的外套、能伸出外套外和缩入外套内的伸缩套,外套的下端敞口、上端通过延伸板封闭,伸缩套上端通过上端板封闭、下端固定所述轮子的安装板,外套内固定有固定板,固定板的上方安装有电机四,电机四的输出轴连接有螺杆二,螺杆二贯穿固定板与伸缩套的上端板螺纹连接,伸缩套内有位于上端板下方的连接板,固定板的底面连接有导向杆,导向杆的下端贯穿上端板后与连接板连接,螺杆二的下端活动安装在连接板处,连接板的底面固定有磁铁二,安装板在伸缩套缩入外套内时吸附固定在磁铁二上,导向杆在伸缩套缩入外套内时收纳在伸缩套内。
14.与现有技术相比,本发明的一种智能助行装置的有益效果如下:
15.(1)通过在医院走廊墙上安装有可以滑动的助行器,助行器能套在患者腰部,从而能协助患者在走廊行走得到充分的训练,有利于康复,让需要扶行的患者,有自我行走的心理安慰。
16.(2)采用腰部箍件,能在患者腰部给患者提供一个支撑扶持力,防止患者摔倒;采用可拉撑的防摔件,可有效防止患者摔倒,并且还能当做临时凳子方便患者坐着休息;采用支撑脚和轮子,便于患者临时坐着时移入病房内;采用手环,便于控制使助行器从距离病房比较远的位置自动移动至距离病房比较近的位置,缩短人工扶行患者的距离,减少工作强度。
17.(3)腰环处采用扶手便于患者双手抓握,腰环采用开口便于患者进出腰环内外,采用可对接的伸缩件可打开和关闭腰环,打开时患者可以出腰环外,关闭时可防止患者从开口处摔倒。
18.(4)采用磁铁一吸附固定对接部,使得两个伸缩件连接牢固。
19.(5)采用拨动件和滑槽,便于操作使两个伸缩件相互靠近对接和相互远离分开。
20.(6)采用延伸板,便于安装气缸、支撑脚和便于连接滑块。
21.(7)采用中部宽度大于两端宽度的弧形气囊,弧形气囊与腰部形状相适应,紧箍腰
部时可避免损伤腰部,提高使用的安全性和增加使用的舒适感;采用挂环便于悬挂伸缩带。
22.(8)撑托部采用三角结构,前侧采用一个连接带,该连接带位于两腿之间可防止影响患者行走;采用电动收卷装置和伸缩带可以拉撑撑托部,使撑托部可以当做凳子供患者坐着休息,而且能有效的防止患者向下摔倒。
23.(9)螺母与延伸板采用可拆卸连接的方式,延伸板与螺母连接时,使得助行器可被电动驱动移动,延伸板与螺母拆卸时,使得患者可以推着助行器移动,从而使得患者得到行走锻炼。
24.(10)外套下端敞口,导向杆贯穿伸入伸缩套内,从而使得伸缩套能缩入外套内,导向杆能缩入伸缩套内,从而缩短支撑脚;采用磁铁二便于固定伸缩套。
25.(11)采用腋撑,高度升高时至患者腋下能够有效地给患者上肢提供支撑力;高度降低时可以与腰部箍件一起对腰部上下进行支撑,提升支撑的稳固性。
26.通过以下的描述并结合附图,本发明将变得更加清晰,这些附图用于解释本发明的实施例。
附图说明
27.图1为智能助行装置的上墙示意图一。
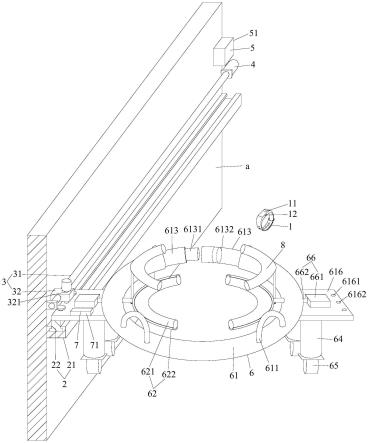
28.图2为智能助行装置的上墙示意图二。
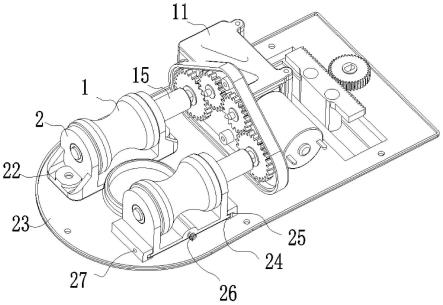
29.图3为助行器的示意图一。
30.图4为助行器的示意图二。
31.图5为助行器的示意图三。
32.图6为助行器的示意图四。
33.图7为助行器的示意图五。
34.图8为助行器的示意图六。
35.图9为电动收卷装置的示意图。
36.图10为防摔件的示意图。
37.图11为支撑脚的示意图一。
38.图12为支撑脚的示意图二。
39.图13为腋撑的截面图。
40.图14为扶手的截面图。
41.图15为手环与控制装置一之间的控制框图。
42.图16为控制装置二与助行器处的电动元件间的控制框图。
43.附图标号说明:墙a,手环1,患者信息标识11,充电接口12,充电电池13,无线通讯装置一14,控制器三15,操作按钮16,导轨滑块结构2,导轨21,滑块22,接孔三221,传动装置3,丝杆31,螺母32,连接孔四321,驱动装置4,控制装置一5,控制箱一51,控制器一52,无线通讯装置二53,助行器6,腰环61,扶手611,外套61a,压力传感器61b,开口612,伸缩件613,对接部6131,磁铁一6132,滑槽614,拨动件615,延伸板616,连接孔一6161,连接孔二6162,螺栓617,推杆二618,气缸二619,腰部箍件62,弧形气囊二621,弧形固定件622,挂环6221,防摔件63,撑托部631,连接带632,伸缩带633,连接扣634,支撑脚64,外套641,固定板6411,导向杆6412,伸缩套642,上端板6421,连接板6422,磁铁二6423,电机四643,螺杆二644,轮
子65,安装板651,推拉装置66,气缸一661,推杆一662,电动收卷装置67,开口67a,外壳671,电机二672,卷轴673,控制装置二7,控制箱二71,控制器二72,按钮一73,按钮二74,按钮三75,电源二76,报警器77,按钮四78,腋撑8,骨架81,弧形气囊一82,电机一83,螺杆一84,让位槽85。
具体实施方式
44.现在参考附图描述本发明的实施例,附图中类似的元件标号代表类似的元件。
45.请参考图1-16,所述的智能助行装置安装在走廊处没有开设病房门的墙壁上,可以由停靠位置移动至最近的那个病房的门口,更接近患者,可减少患者步行至智能助行装置的距离。智能助行装置包括手环1、导轨滑块结构2、传动装置3、驱动装置4、控制装置5、助行器6、可升降的腋撑8。所述导轨滑块结构2、传动装置3、驱动装置4、控制装置5安装于医院病房走廊处的墙a上。手环1与控制装置5无线通讯并使驱动装置4通过传动装置3联动助行器6由停放处沿导轨滑块结构2的导轨21移动至靠近病房处。
46.所述手环1上贴有可撕除的患者信息标识11。手环1的侧面有充电接口12,手环1内装有充电电池13、无线通讯装置一14、控制器三15。手环1侧面还有操作按钮16。
47.所述导轨滑块结构2包括导轨21和滑块22,导轨21的一侧固定在墙a上。滑块22滑动安装在导轨21上,滑块22上开有两个连接孔三221。
48.所述传动装置3是丝杆螺母结构,丝杆31的两端固定在墙a上,螺母32套装在丝杆31上与丝杆31螺纹连接,螺母32上开有一连接孔四321和一限位孔322。
49.所述驱动装置4是电机三,电机三的输出轴与丝杆螺母结构的丝杆31连接。
50.所述控制装置5包括控制箱一51、安装于控制箱一51内的控制器一52、与控制器一52连接的无线通讯装置二53,无线通讯装置二53和无线通讯装置一14无线通讯,控制器一52通过电源一54供电。电机三与控制器一52相连。通过操作手环1使得无线通讯装置一14和无线通讯装置二53无线通讯,从而使控制器一52控制驱动装置4工作,带动丝杆31工作,从而使得螺母32沿着丝杆31移动。
51.所述助行器6可拆卸的安装于导轨滑块结构2的滑块22上和螺母32上,螺母32沿着丝杆31移动时,带着助行器6和滑块22沿着导轨21移动,从而能让。助行器6包括可开合的腰环61,腰环61内侧有可相向移动靠拢紧箍腰部和反向移动远离释放腰部的两个腰部箍件62,腰环61处还安装有位于腰部箍件62的下方的可拉紧和放松且可拆卸的防摔件63,腰环61的两侧安装有可伸缩的支撑脚64,支撑脚64的下端安装有轮子65,轮子65可以是万向轮也可以是非万向滚轮。助行器6还有使得两个腰部箍件62相向和反向移动的推拉装置66。
52.所述腰环61为内部空心的圆环,里面方便走线。腰环61的左侧或右侧安装于导轨滑块结构2的滑块22上。腰环61的前侧左右位置分别固定有对称的可感应抓握压力的扶手611,便于患者双手抓握,扶手611外包裹有外套61a,扶手611的表面固定有压力传感器61b,压力传感器61b被外套61a遮蔽。腰环61的后侧有开口612,便于患者进出腰环61。腰环61在开口612的两边分别安装有一个可缩入腰环61内和伸出腰环61外的伸缩件613,开口612两边的伸缩件613在伸出腰环61外时相互对接固定,便于关闭和打开腰环61,打开时患者可以出腰环61外,关闭时可防止患者从开口612处摔倒。所述开口612一边的伸缩件613端面外凸有对接部6131,开口612另一边的伸缩件613的端面内凹并且在内凹处有磁铁一6132,对接
部6131伸入开口612另一边的伸缩件613内并吸附固定在磁铁一6132上,使得两个伸缩件613连接牢固。所述腰环61在开口612的两边分别沿腰环61圆周方向开有一滑槽614,各滑槽614内有一拨动件615,各拨动件615的内端与相应伸缩件613固定连接,便于操作使得两个伸缩件613相互靠近对接和相互远离分开。
53.所述腰环61的左右两侧朝外延伸有对称的延伸板616,各延伸板616底部固定有两个所述支撑脚64,四个支撑脚64可以保持平稳。各延伸板616顶部安装有所述推拉装置66。腰环61一侧的延伸板616与导轨滑块结构2的滑块22可拆卸连接。各所述延伸板616上开有连接孔一6161和连接孔二6162,连接孔一6161位于连接孔二6162的两边,腰环61一侧的延伸板616上的连接孔一6161和连接孔三221通过螺栓617连接,与导轨滑块结构2的滑块22可拆卸连接的延伸板616上的连接孔二6162通过推杆二618与螺母32上的连接孔四321可拆卸连接,推杆二618的上端连接有安装在螺母32上的气缸二619,推杆二618从连接孔二6162处上移开后,使得腰环61可由患者推动滑行。气缸二619通过独立电池供电和通过独立开关控制运行和停止。气缸二619处也可以安装与手环1无线通讯的无线通讯装置,手环1安装单独控制气缸二619工作的操作按钮,通过手环1来控制气缸二619运行和停止。
54.所述腰部箍件62包括两个弧形气囊二621和两个弧形固定件622,弧形气囊二621与腰部形状相适应,弧形气囊二621中部宽度大于两端宽度,弧形气囊二621与腰部形状相适应,紧箍腰部时可避免损伤腰部,提高使用的安全性和增加使用的舒适感。各弧形气囊二621固定在相应弧形固定件622内侧,各弧形固定件622的底部靠腰环61后侧的位置固定有挂环6221,便于悬挂伸缩带633。
55.所述防摔件63包括三角结构的撑托部631,撑托部631的三个角分别有连接带632,撑托部631的一个连接带632朝腰环61前侧,该连接带632位于患者两腿之间,另两个连接带632朝腰环61后侧,该另两个连接带632位于患者臀部后侧。撑托部631朝腰环61后侧的两个连接带632分别可拆卸连接有一伸缩带633,两个伸缩带633于拆卸时挂于挂环6221处。两个伸缩带633的末端固定有连接扣634,撑托部631朝腰环61后侧的两个连接带632穿过相应连接扣634后反折并可拆卸固定在撑托部631的底面,具体可以通过魔术贴结构固定在撑托部631的底面。所述腰环61底部安装有收卷各伸缩带633和撑托部631朝腰环61前侧的连接带632的电动收卷装置67。通过电动收卷装置67收紧伸缩带633,可以让撑托部631保持为拉撑状态,从而患者行走锻炼感到累时可以临时坐在撑托部631上休息。
56.所述支撑脚64包括固定在延伸板616底面的外套641、能伸出外套641外和缩入外套641内的伸缩套642。外套641的下端敞口、上端通过延伸板616封闭,伸缩套642的上端通过上端板6421封闭,下端固定所述轮子65的安装板651。外套641内固定有固定板6411,固定板6411的上方安装有电机四643,电机四643的输出轴连接有螺杆二644,螺杆二644贯穿固定板6411与伸缩套642的上端板螺纹连接,伸缩套642内有位于上端板6421下方的连接板6422,固定板6411的底面连接有导向杆6412,导向杆6412的下端贯穿上端板6421后与连接板6422连接,螺杆二644的下端活动安装在连接板6422处,连接板6422的底面固定有磁铁二6423。安装板651在伸缩套642缩入外套641内时吸附固定在磁铁二6423上,导向杆6412在伸缩套642缩入外套641内时收纳在伸缩套642内,从而缩短支撑脚64。
57.所述推动装置66包括一气缸一661,各气缸一661连接有一推杆一662,各推杆一662贯穿腰环61与腰环61内侧的腰部箍件62连接。各弧形固定件622的外侧与相应推杆一
662连接。
58.所述电动收卷装置67包括外壳671、安装于外壳671内的电机二672和卷轴673,卷轴673与电机二672的输出轴相连,外壳671的侧面开有开口67a,伸缩带633穿过开口67a伸入外壳671内固定在卷轴673上并且能被卷轴673收卷。电机二672、气缸一661、电机四643通过控制装置二7控制。
59.所述控制装置二7包括控制箱二71、安装于控制箱二71内的控制器二72、报警器77和安装于控制箱二71表面的按钮一73、按钮二74和按钮三75以及按钮四78,按钮一73用于使气缸一661工作,按钮二74用于使电机四643工作,按钮三75用于使电机二672工作,压力传感器61b、按钮四78、报警器77、按钮一73、按钮二74、按钮三75、电机二672、气缸一661和电机四643均与控制器二72电连接。控制器二72通过电源二76供电。控制箱二71处有密布的供报警器77声音传播扩散的小孔。
60.所述腋撑8包括两个骨架81和包裹各骨架81的弧形气囊一82,骨架81处安装有电机一83,电机一83的输出轴连接有螺杆一84,弧形气囊一82在电机一83、电机一83的输出轴和螺杆一84的位置有让位槽85,螺杆一84的下向下垂直贯穿安装在推杆一662处,推杆一662被贯穿处有螺纹孔,螺杆一84与螺纹孔螺纹配合。弧形气囊一82也可以由海绵代替。电机一83与控制器二72电连接。
61.使用时,患者、家属或医护人员操作手环1上的操作按钮16,通过控制器三15控制无线通讯装置一14发出信号,由无线通讯装置二53接收信号并反馈给控制器一52,由控制器一52控制驱动装置4工作,使得丝杆31转动,从而联动螺母32沿着丝杆31移动,因螺母32通过推杆二618与延伸板616相连,延伸板616又通过螺栓617与滑块22相连,从而带着延伸板616、滑块22沿着导轨21移动,使得助行器6从停靠位置移动到靠近病房门口的位置。
62.家属或医护人员先操作拨动件615,使得拨动件615沿着滑槽614移动,使两个伸缩件613反向移动缩入腰环61内,家属或者医护人员将患者扶到助行器6旁并让病人从开口612处进入到腰环61内的两个腰部箍件62之间。家属或者医护人员再操作拨动件615,使得拨动件615沿着滑槽614移动,使两个伸缩件613相向移动伸出腰环61外并且彼此对接固定。患者双手扶在扶手611位置。家属或者医护人员将撑托部631的另两个连接带632穿过患者两腿之间后连接至伸缩带633上,这时撑托部631处于放松状态。
63.家属或者医护人员操作按钮一73,使控制器二72控制两个气缸一661工作,两个推杆一662推动两个腰部箍件62相向移动箍在患者腰部,给腰部提供支撑力量,从而防止患者摔倒。同时,腋撑8高度处于未升高状态,可以与腰部箍件62一起对腰部上下进行支撑,提升支撑的稳固性。
64.家属或者医护人员操作气缸二619的独立开关使得气缸二619工作,以将推杆二618从连接孔二6162处上移离开连接孔二6162。这时,患者双手扶在扶手611上并且向前行走,可以推着助行器6和滑块22沿着导轨21移动,从而能协助患者在走廊行走得到充分的训练,有利于康复,让需要扶行的患者,有自我行走的心理安慰。患者行走过程中,当有摔倒趋势时,患者会双手抓紧扶手611,压力传感器61b感受到压力,使得报警器77报警。
65.患者需要休息时,患者可以自己操作钮二74,使控制器二72控制四个电机四643工作,使四个支撑脚64向下伸长并使轮子65贴靠地面,同时操作按钮三75使各电机二672工作,使得卷轴673收卷伸缩带633,让撑托部631被拉撑,并且再次操作按钮一73,使得控制器
二72控制两个气缸一661的推杆一662复位,使得两个腰部箍件62反向移动松开患者腰部,患者则可以坐在撑托部631上休息。
66.患者需要腋撑8支撑腋下时,家属或者医护人员操作按钮四78,使得电机一83工作,带动螺杆一84正向转动并相对相对螺纹孔向上移动,使得腋撑8高度升高至患者腋下,从而能够有效地给患者提供支撑力。不需要支撑腋下时则再次操作按钮四78可使螺杆一84反向转动,以使腋撑8高度降低,这样腋撑8则与腰部箍件62一起对腰部上下进行支撑,提升支撑的稳固性。
67.在四个支撑脚64向下伸长并且轮子65贴靠地面后,可以将螺栓617取下,可以通过轮子65的移动让整个助行器6调转180度,再通过螺栓617将腰环61另一侧的延伸板616上的连接孔一6161和滑块22上的连接孔三221连接。方便患者来回行走训练。为了更加方便整个助行器6调转角度,可以用插销代替螺栓617,这样只需要拔出插销等整个助行器6调转角度后再插上即可,不需要拧紧拧松操作。
68.以上结合最佳实施例对本发明进行了描述,但本发明并不局限于以上揭示的实施例,而应当涵盖各种根据本发明的本质进行的修改、等效组合。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。