1.本发明涉及齿轮领域,特别是涉及一种高线速度人字齿轮传动减阻装置、方法及系统。
背景技术:
2.由于人字齿轮能够承受轴向力,所以在矿山、船舶等大功率传动领域中广泛使用人字齿轮,当其以高线速度旋转时,相邻齿面在油气混合物形成的强迫涡流下产生压差,进而产生与齿轮旋转方向相反的阻力矩,无法满足高效率的齿轮传动的设计需求。
3.基于上述问题,亟需一种减阻方法以提高人字齿轮的传动效率。
技术实现要素:
4.本发明的目的是提供一种高线速度人字齿轮传动减阻装置、方法及系统,可降低人字齿轮在高线速度旋转中的阻力,提高人字齿轮的传动效率。
5.为实现上述目的,本发明提供了如下方案:
6.一种高线速度人字齿轮传动减阻装置,所述人字齿轮包括主动轮和从动轮,所述高线速度人字齿轮传动减阻装置包括第一弧形导流板及第二弧形导流板;
7.所述第一弧形导流板的一端与所述第二弧形导流板的一端固定连接;
8.所述第一弧形导流板覆盖所述主动轮的齿面;所述第二弧形导流板覆盖所述从动轮的齿面。
9.可选地,所述第一弧形导流板的覆盖范围为所述主动轮的齿面的一周;所述第二弧形导流板的覆盖范围为所述从动轮的齿面的一周;所述第一弧形导流板的另一端与所述第二弧形导流板的另一端固定连接。
10.可选地,所述第一弧形导流板与所述主动轮的齿顶之间的距离为第一设定距离;
11.所述第二弧形导流板与所述从动轮的齿顶之间的距离为第二设定距离。
12.为实现上述目的,本发明还提供了如下方案:
13.一种高线速度人字齿轮传动减阻方法,包括:
14.初始化第一弧形导流板及第二弧形导流板的覆盖范围;所述第一弧形导流板的初始覆盖范围为主动轮齿面的1/4;所述第二弧形导流板的初始覆盖范围为从动轮齿面的1/4;
15.基于所述第一弧形导流板、所述第二弧形导流板及人字齿轮,建立齿轮箱模型;
16.对所述齿轮箱模型进行布尔计算,去除人字齿轮、第二弧形导流板及第二弧形导流板,得到流体计算域模型;
17.对所述流体计算域模型进行有限元网格划分,得到齿轮箱网格模型;
18.基于所述齿轮箱网格模型,对人字齿轮的转速进行流体力学仿真,确定齿轮旋转受阻力矩;
19.根据所述齿轮旋转受阻力矩确定风阻功率损失;
20.根据所述风阻功率损失,调整所述第一弧形导流板及第二弧形导流板的覆盖范围,直至所述风阻功率损失最小,得到第一弧形导流板及第二弧形导流板的最优覆盖范围;
21.基于最优覆盖范围,将第一弧形导流板覆盖在主动轮齿面上,将第二弧形导流板覆盖在从动轮齿面上。
22.可选地,采用ansys mesh对所述流体计算域模型进行有限元网格划分,得到齿轮箱网格模型。
23.可选地,所述流体计算域模型包括人字齿轮啮合区及流体区;
24.所述对所述流体计算域模型进行有限元网格划分,得到齿轮箱网格模型,具体包括:
25.采用分离法对所述人字齿轮啮合区进行网格划分;
26.采用全局控制法对所述流体区进行网格划分。
27.可选地,所述基于所述齿轮箱网格模型,对人字齿轮的转速进行流体力学仿真,确定齿轮旋转受阻力矩,具体包括:
28.采用流体力学计算软件,基于所述齿轮箱网格模型,对人字齿轮的转速进行流体力学仿真,确定齿轮旋转受阻力矩。
29.可选地,采用以下公式,计算风阻功率损失:
30.p=mω;
31.其中,p为风阻功率损失,m为齿轮旋转所受阻力矩,ω为角速度。
32.可选地,所述根据所述风阻功率损失,调整所述第一弧形导流板及第二弧形导流板的覆盖范围,具体包括:
33.在所述风阻功率损失大于设定阈值时,将所述第一弧形导流板的覆盖范围增加主动轮齿面的1/4,将所述第二弧形导流板的覆盖范围增加从动轮齿面的1/4。
34.为实现上述目的,本发明还提供了如下方案:
35.一种高线速度人字齿轮传动减阻系统,包括:
36.初始化单元,用于初始化第一弧形导流板及第二弧形导流板的覆盖范围;所述第一弧形导流板的初始覆盖范围为主动轮齿面的1/4;所述第二弧形导流板的初始覆盖范围为从动轮齿面的1/4;
37.齿轮箱建立单元,与所述初始化单元连接,用于基于所述第一弧形导流板、所述第二弧形导流板及人字齿轮,建立齿轮箱模型;
38.流体计算域确定单元,与所述齿轮箱建立单元连接,用于对所述齿轮箱模型进行布尔计算,去除人字齿轮、第二弧形导流板及第二弧形导流板,得到流体计算域模型;
39.网格划分单元,与所述流体计算域确定单元连接,用于对所述流体计算域模型进行有限元网格划分,得到齿轮箱网格模型;
40.仿真单元,与所述网格划分单元连接,用于基于所述齿轮箱网格模型,对人字齿轮的转速进行流体力学仿真,确定齿轮旋转受阻力矩;
41.损失确定单元,与所述仿真单元连接,用于根据所述齿轮旋转受阻力矩确定风阻功率损失;
42.调整单元,分别与所述损失确定单元及所述仿真单元连接,用于根据所述风阻功率损失,调整所述第一弧形导流板及第二弧形导流板的覆盖范围,直至所述风阻功率损失
最小,得到第一弧形导流板及第二弧形导流板的最优覆盖范围;
43.覆盖单元,与所述调整单元连接,用于基于最优覆盖范围,将第一弧形导流板覆盖在主动轮齿面上,将第二弧形导流板覆盖在从动轮齿面上。
44.根据本发明提供的具体实施例,本发明公开了以下技术效果:通过在主动轮和从动轮的齿面覆盖弧形导流板,使得人字齿轮在高线速度旋转中的阻力减小,进而提高人字齿轮的传动效率。
附图说明
45.为了更清楚地说明本发明实施例或现有技术中的技术方案,下面将对实施例中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动性的前提下,还可以根据这些附图获得其他的附图。
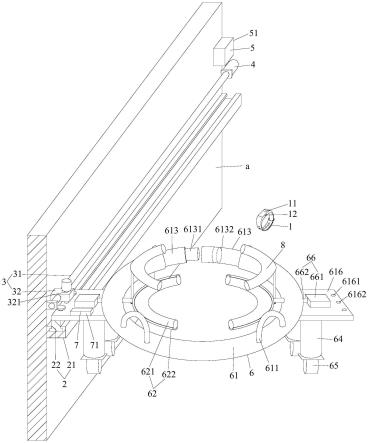
46.图1为本发明高线速度人字齿轮传动减阻装置的全覆盖结构示意图;
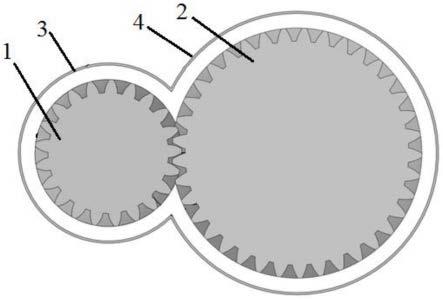
47.图2为弧形导流板覆盖1/4人字齿轮的结构示意图;
48.图3为弧形导流板覆盖2/4人字齿轮的结构示意图;
49.图4为弧形导流板覆盖3/4人字齿轮的结构示意图;
50.图5为本发明高线速度人字齿轮传动减阻方法的流程图;
51.图6为齿轮箱计算模型示意图;
52.图7(a)为网格截面示意图;
53.图7(b)为啮合间隙截面示意图;
54.图8为不同覆盖范围的弧形导流板的齿轮风阻功率损失对比图;
55.图9为本发明高线速度人字齿轮传动减阻系统的模块结构示意图。
56.符号说明:
57.1-主动轮,2-从动轮,3-第一弧形导流板,4-第二弧形导流板,初始化单元-5,齿轮箱建立单元-6,流体计算域确定单元-7,网格划分单元-8,仿真单元-9,损失确定单元-10,调整单元-11,覆盖单元-12。
具体实施方式
58.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
59.本发明的目的是提供一种高线速度人字齿轮传动减阻装置、方法及系统,人字齿轮包括主动轮和从动轮,通过在主动轮和从动轮的齿面覆盖弧形导流板,使得人字齿轮在高线速度旋转中的阻力减小,进而提高人字齿轮的传动效率。
60.为使本发明的上述目的、特征和优点能够更加明显易懂,下面结合附图和具体实施方式对本发明作进一步详细的说明。
61.如图1所示,本发明高线速度人字齿轮传动减阻装置包括第一弧形导流板3及第二弧形导流板4。
62.所述第一弧形导流板3的一端与所述第二弧形导流板4的一端固定连接。
63.所述第一弧形导流板3覆盖所述主动轮1的齿面。所述第二弧形导流板4覆盖所述从动轮2的齿面。
64.在本实施例中,第一弧形导流板3和第二弧形导流板4拼接。弧形导流板的覆盖范围以齿轮副中心线为起点,旋转圆周角度为α1、α2。
65.作为另一种实施方式,第一弧形导流板覆盖从动轮的齿面,第二弧形导流板覆盖主动轮的齿面。另外,主动轮和从动轮可根据实际情况互换。
66.优选地,如图1所示,所述第一弧形导流板3的覆盖范围为所述主动轮1的齿面的一周。所述第二弧形导流板4的覆盖范围为所述从动轮2的齿面的一周。所述第一弧形导流板3的另一端与所述第二弧形导流板4的另一端固定连接。即第一弧形导流板3和第二弧形导流板4全覆盖人字齿轮的齿面。此外,第一弧形导流板3的覆盖范围也可为主动轮1的齿面的1/4,第二弧形导流板4的覆盖范围为从动轮2的齿面的1/4,即α1=α2=90
°
,如图2所示。第一弧形导流板3的覆盖范围也可为主动轮1的齿面的2/4,第二弧形导流板4的覆盖范围为从动轮2的齿面的2/4,即α1=α2=180
°
,如图3所示。第一弧形导流板3的覆盖范围也可为主动轮1的齿面的3/4,第二弧形导流板4的覆盖范围为从动轮2的齿面的3/4,即α1=α2=270
°
,如图4所示。
67.进一步地,所述第一弧形导流板3与所述主动轮1的齿顶之间的距离为第一设定距离。所述第二弧形导流板4与所述从动轮2的齿顶之间的距离为第二设定距离。在本实施例中,两个弧形导流板距齿顶的距离分别为第一设定距离d1、第二设定距离d2。d1和d2可根据实际需要预先设定。
68.弧形导流板距齿顶的距离影响高速齿轮轮齿所接受的空气,距离小则齿轮轮齿上的空气少,因此阻力矩就小,反之亦然。
69.不同的应用环境齿轮箱体可能不同,但人字齿轮副的结构形式相同,因此本发明的减阻装置对高线速度人字齿轮而言具有普遍适用性。
70.如图5所示,本发明高线速度人字齿轮传动减阻方法包括:
71.s1:初始化第一弧形导流板3及第二弧形导流板4的覆盖范围。所述第一弧形导流板3的初始覆盖范围为主动轮1齿面的1/4。所述第二弧形导流板4的初始覆盖范围为从动轮2齿面的1/4。
72.s2:基于所述第一弧形导流板3、所述第二弧形导流板4及人字齿轮,建立齿轮箱模型。在本实施例中,通过ug(unigraphics nx,交互式cad/cam系统)软件建立高线速度人字齿轮箱计算模型如图6所示。
73.s3:对所述齿轮箱模型进行布尔计算,去除人字齿轮、第二弧形导流板4及第二弧形导流板4,得到流体计算域模型。具体地,为进行cfd(computational fluid dynamics,计算流体动力学)计算,建立齿轮箱的流体计算域模型,对齿轮箱模型进行布尔运算,去除齿轮与导流板固体,保留齿轮箱体的流体域作为计算区域。
74.s4:对所述流体计算域模型进行有限元网格划分,得到齿轮箱网格模型。在本实施例中,所述流体计算域模型包括人字齿轮啮合区及流体区,采用分离法对人字齿轮啮合区进行网格划分;采用全局控制法对流体区进行网格划分。流体区为除人字齿轮啮合区以外的区域。
75.具体地,采用ansys mesh对流体计算域模型网格划分,箱体内湍流运动复杂,故采用能更好适应复杂流动的非结构化网格。齿轮副极小的啮合区域间隙对网格划分造成了较大困难,为提高网格划分精度,在不影响计算精度的前提下,采用分离法对人字齿轮啮合区进行网格划分处理,对齿轮及压力出油口进行网格细化,其他部分采用全局控制网格划分。
76.在网格划分过程中需控制计算域的网格划分质量。通过ansys mesh自动计算的网格偏斜度作为网络质量的判断标准,以正四面体为基准,与正四面体倾斜程度越大的四面体网格其网格偏斜度越大,则网格质量也越差,会影响计算结果精度,通常网格偏斜度小于0.84即达到计算标准。齿轮系统网格截面示意图如图7(a)所示。由于计算过程中啮合区域流动变化剧烈,为防止出现负体积,啮合区域至少保证2~3层网格,如图7(b)所示。
77.s5:基于所述齿轮箱网格模型,对人字齿轮的转速进行流体力学仿真,确定齿轮旋转受阻力矩。具体地,采用流体力学计算软件,基于所述齿轮箱网格模型,对人字齿轮的转速进行流体力学仿真,确定齿轮旋转受阻力矩。
78.具体地,将齿轮箱网格模型的网格文件(.msh)导入流体力学计算软件fluent中,在fluent的dynamic mesh选项中开启瞬态动网格模型,针对变形较小的网格采用弹簧光顺方法(smoothing),针对变形较大的网格采用网格重构法(remeshing),通过编写udf(用户自定义函数,user defined function)描述齿轮的旋转运动状态并导入fluent,最终在dynamic mesh中选择齿轮壁面边界来应用udf,以此让齿轮副获得与真实工况相同的转速.其中udf中采用fluent软件自带的函数:define_cg_motion函数名称,运动区域索引,平动函数名称,转动函数名称,当前时间,时间步长)来定义齿轮副运动。
79.网格的变形大小由fluent软件自动判断,若偏斜度大于这个阈值,则使用remeshing方法重构网格,小于阈值则使用smoothing方法优化网格,因为网格在动,所以会导致网格有变化,因此需要一边计算一边对网格进行处理。
80.进一步地,仿真过程中监测齿轮副的无量纲阻力矩系数cm的变化,进而确定齿轮旋转所受力矩m,n
·
m:
[0081][0082]
其中,ρ为参考密度,1.225kg/m3;v为参考速度,m/s;a为参考截面积,m/s2;l为参考特征长度,m/s。
[0083]
s6:根据所述齿轮旋转受阻力矩确定风阻功率损失。具体地,齿轮旋转时会受到空气的阻碍,造成功率损失,本实施例采用以下公式计算风阻功率损失:
[0084]
p=mω;
[0085]
其中,p为风阻功率损失,w,m为齿轮旋转所受阻力矩,ω为角速度,rad/s。
[0086]
s7:根据所述风阻功率损失,调整所述第一弧形导流板3及第二弧形导流板4的覆盖范围,直至所述风阻功率损失最小,得到第一弧形导流板3及第二弧形导流板4的最优覆盖范围。具体地,在所述风阻功率损失大于设定阈值时,将所述第一弧形导流板3的覆盖范围增加主动轮1齿面的1/4,将所述第二弧形导流板4的覆盖范围增加从动轮2齿面的1/4。
[0087]
s8:基于最优覆盖范围,将第一弧形导流板3覆盖在主动轮1齿面上,将第二弧形导流板4覆盖在从动轮2齿面上。
[0088]
在本实施例中,通过建立不同覆盖范围的弧形导流板,应用cfd方法提出一种“人
字齿轮的减阻装置
→
cfd方法计算人字齿轮副风阻功率损失
→
分析不同覆盖范围的减阻装置的减阻效果”的研究思路,仿真计算对应的风阻功率损失,使高线速度、高效率的人字齿轮传动的风阻功率损失减小。
[0089]
为了更好地理解本发明的方案,下面对不同覆盖范围的弧形导流板的减阻效果进行了对比:
[0090]
将导流板安装在啮入侧且距齿顶距离为5mm,对比导流板覆盖范围为1/4圆弧、2/4圆弧、3/4圆弧、全覆盖四种情形下的减阻效果,即α1=α2=90
°
;α1=α2=180
°
;α1=α2=270
°
。采用以下公式计算减阻效果:
[0091][0092]
其中,η为应用减阻装置后的减阻效果,%;p为不加减阻装置的齿轮风阻功率损失,w;p
减阻
是应用减阻装置后的风阻功率损失,w。
[0093]
如图8所示,当导流板从覆盖齿面90
°
至覆盖齿面270
°
时,风阻功率损失近似呈线性下降,但是从覆盖齿面270
°
至全覆盖时,风阻功率损失变化很小,这是由于从覆盖齿面270
°
及至全覆盖时,其真实覆盖范围未及1/4圆弧,因此减阻效率低于从覆盖范围90
°
至180
°
、180
°
至270
°
这两种情形,根据计算结果得到各个覆盖范围的减阻装置的减阻效果如表1所示。可以看出,全覆盖导流板减阻结构的减阻效果最好,因此在人字齿轮传动系统中,可以对齿轮副应用全覆盖型的弧形导流板来达到减阻优化的目的,提高传动效率。
[0094]
表1不同减阻结构的减阻效果
[0095]
减阻结构主动轮减阻效果从动轮减阻效果总减阻效果无0%0%0%1/4圆弧5.12%5.53%5.34%2/4圆弧14.51%17.10%15.91%3/4圆弧20.38%30.16%25.68%全覆盖21.51%31.16%26.74%
[0096]
图8中,横坐标从左至右代表无导流板、1/4圆弧导流板、2/4圆弧导流板、3/4圆弧导流板、导流板全覆盖共5种情形,纵坐标为这5种情形下小齿轮风阻损失、大齿轮风阻损失、大小齿轮总风阻损失,以此说明本发明设计的不同导流板减阻装置均有减阻效果,且在全覆盖时减阻效果最佳。
[0097]
如图9所示,本发明高线速度人字齿轮传动减阻系统包括:初始化单元5、齿轮箱建立单元6、流体计算域确定单元7、网格划分单元8、仿真单元9、损失确定单元10、调整单元11及覆盖单元12。
[0098]
其中,所述初始化单元5用于初始化第一弧形导流板3及第二弧形导流板4的覆盖范围。所述第一弧形导流板3的初始覆盖范围为主动轮1齿面的1/4。所述第二弧形导流板4的初始覆盖范围为从动轮2齿面的1/4。
[0099]
所述齿轮箱建立单元6与所述初始化单元5连接,所述齿轮箱建立单元6用于基于所述第一弧形导流板3、所述第二弧形导流板4及人字齿轮,建立齿轮箱模型。
[0100]
所述流体计算域确定单元7与所述齿轮箱建立单元6连接,所述流体计算域确定单元7用于对所述齿轮箱模型进行布尔计算,去除人字齿轮、第二弧形导流板4及第二弧形导
流板4,得到流体计算域模型。
[0101]
所述网格划分单元8与所述流体计算域确定单元7连接,所述网格划分单元8用于对所述流体计算域模型进行有限元网格划分,得到齿轮箱网格模型。
[0102]
所述仿真单元9与所述网格划分单元8连接,所述仿真单元9用于基于所述齿轮箱网格模型,对人字齿轮的转速进行流体力学仿真,确定齿轮旋转受阻力矩。
[0103]
所述损失确定单元10与所述仿真单元9连接,所述损失确定单元10用于根据所述齿轮旋转受阻力矩确定风阻功率损失。
[0104]
所述调整单元11分别与所述损失确定单元10及所述仿真单元9连接,所述调整单元11用于根据所述风阻功率损失,调整所述第一弧形导流板3及第二弧形导流板4的覆盖范围,直至所述风阻功率损失最小,得到第一弧形导流板3及第二弧形导流板4的最优覆盖范围。
[0105]
所述覆盖单元12与所述调整单元11连接,所述覆盖单元12用于基于最优覆盖范围,将第一弧形导流板3覆盖在主动轮1齿面上,将第二弧形导流板4覆盖在从动轮2齿面上。
[0106]
相对于现有技术,本发明高线速度人字齿轮传动减阻系统与上述高线速度人字齿轮传动减阻方法的有益效果相同,在此不再赘述。
[0107]
本说明书中各个实施例采用递进的方式描述,每个实施例重点说明的都是与其他实施例的不同之处,各个实施例之间相同相似部分互相参见即可。对于实施例公开的系统而言,由于其与实施例公开的方法相对应,所以描述的比较简单,相关之处参见方法部分说明即可。
[0108]
本文中应用了具体个例对本发明的原理及实施方式进行了阐述,以上实施例的说明只是用于帮助理解本发明的方法及其核心思想;同时,对于本领域的一般技术人员,依据本发明的思想,在具体实施方式及应用范围上均会有改变之处。综上所述,本说明书内容不应理解为对本发明的限制。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。