1.本实用新型涉及防震装置技术领域,具体是一种人工智能防震装置。
背景技术:
2.现在日益激烈的市场竞争,谁能主动掌握创新权谁就能得到市场的份额,从而分的市场的一杯羹,酒店尤为重要,酒店行业不光竞争,如果服务水平和菜品质量不过关,对酒店生存就会产生致命的危害,而如今人工费的不断上涨,尤其服务行业,酒店行业也面临着招人难的境地,而设计一款可以提高酒店档次和门面的迎宾美女机器人就显得很要了。
3.根据中国专利号:cn105415379a,公开了一种仿真迎宾机器人,所述机器人包括机器头、机器手、机器身、外壳、电气控制装置、调节装置、移动底盘和遥控装置。迎宾机器人作为餐厅的门面,不但要有迎宾送客的功能,还应具备娱乐性和贴近用户的功能,因此本发明机器人采用硅胶面部,更接近真人,控制机器人的嘴和眼,在说话时嘴会随着相应的动作,机器人会不定时的眨眼;采用双向双侧检测客人进出,对应有相应的动作和语音;增加语音对话功能,客人可以和机器人进行对话交流;还可以在空闲时间跳舞来取悦客人,提高用户体验,吸引客源;增加遥控装置,可随意移动机器人,不必笨拙的搬或推。
4.上述专利存在无法对仿真迎宾机器人装置进行固定,可能会出现人员触碰仿真迎宾机器人导致仿真迎宾机器人倒塌或移动仿真迎宾机器人位置的现象,且仿真迎宾机器人固定后,无法快捷解除对仿真迎宾机器人的固定。
技术实现要素:
5.本实用新型的目的在于:为了解决仿真迎宾机器人触碰后易倒塌、可随意移动位置和无法快捷解除对仿真迎宾机器人固定的问题,提供一种人工智能防震装置。
6.为实现上述目的,本实用新型提供如下技术方案:一种人工智能防震装置,包括驱动座两侧的底端位置处设置有固定块,所述固定块的内壁设置有固定槽,所述固定槽的内壁设置有固定机构,两个所述固定机构之间的位置处设置有转动机构。
7.作为本实用新型再进一步的方案:所述固定机构包括有一号转动杆、一号锥齿轮、传送带、一号滚轮、二号转动杆、齿轮、固定臂、二号滚轮、一号斜块、连接臂、二号斜块和弹簧,所述一号锥齿轮位于一号转动杆的外壁上端,所述二号滚轮位于一号转动杆的外壁且位于一号锥齿轮下方位置处,所述传送带位于二号滚轮的外壁,所述一号滚轮位于传送带的内壁且靠近二号滚轮一侧的位置处,所述二号转动杆位于一号滚轮的上端,所述齿轮位于二号转动杆的上端,所述固定臂位于齿轮一端的位置处,所述一号斜块位于固定臂的一端,所述连接臂位于一号斜块的一侧,所述弹簧位于固定臂的内壁,所述二号斜块位于弹簧的一端。
8.作为本实用新型再进一步的方案:所述转动机构包括有丝杆、二号锥齿轮、一号移动块和二号移动块,所述丝杆位于驱动座的一侧位置处,所述二号锥齿轮位于丝杆的外壁,所述一号移动块位于丝杆的外壁,所述二号移动块位于丝杆的外壁靠近二号锥齿轮一侧的
位置处。
9.作为本实用新型再进一步的方案:所述连接臂的一端与一号斜块固定连接,所述连接臂的另一端与二号斜块固定连接,所述一号斜块309的一端也设置有弹簧312。
10.作为本实用新型再进一步的方案:所述固定臂两两对称共设置有四组,所述固定臂的外壁一端设置有与齿轮相啮合的齿条,所述齿轮位于两个固定臂之间的位置处并与两个固定臂一端的齿条啮合。
11.作为本实用新型再进一步的方案:所述一号移动块与二号移动块的内壁均设置有与丝杆外螺纹相匹配的内螺纹,所述二号锥齿轮与一号锥齿轮相啮合。
12.作为本实用新型再进一步的方案:所述固定块共设置有四组,四个所述固定块两两之间的间距大于驱动座的长宽。
13.与现有技术相比,本实用新型的有益效果是:
14.1、通过设置丝杆、二号锥齿轮、一号转动杆、一号锥齿轮、传送带、一号滚轮、二号转动杆、齿轮、固定臂和二号滚轮实现固定仿真迎宾机器人的功能,通过二号滚轮转动带动传送带转动,传送带转动带动两组一号滚轮同步转动,一号滚轮转动带动齿轮转动,从而使固定臂移动,四组固定臂同步移动使四组固定臂从固定块的一侧位置处经固定槽移动至固定块的另一侧位置处,二号斜块弹出带动连接臂移动,连接臂使一号斜块回弹,从而实现固定仿真迎宾机器人的功能;
15.2、通过设置一号转动杆、一号锥齿轮、传送带、一号移动块、二号移动块、丝杆、一号斜块和二号斜块实现驱动座与固定块解除固定的功能,反方向转动丝杆,一号移动块和二号移动块均向初始位置处移动,一号移动块挤压一组连接臂,二号移动块挤压另一组连接臂,连接臂受挤压影响移动,继续反方向转动丝杆,传送带反转带动齿轮反转,齿轮带动固定臂向初始位置处移动,当固定臂移动至初始位置处,此时二号斜块从固定块另一侧位置处移动至初始位置处,从而实现驱动座与固定块解除固定的功能。
附图说明
16.图1为本实用新型的结构示意图;
17.图2为本实用新型的一号移动块、丝杆和传送带结构示意图;
18.图3为本实用新型的固定机构结构示意图;
19.图4为本实用新型的弹簧、二号斜块和一号斜块结构示意图;
20.图5为本实用新型的转动机构结构示意图。
21.图中:1、驱动座;2、固定块;3、固定机构;301、一号转动杆;302、一号锥齿轮;303、传送带;304、一号滚轮;305、二号转动杆;306、齿轮;307、固定臂;308、二号滚轮;309、一号斜块;310、连接臂;311、二号斜块;312、弹簧;4、固定槽;5、转动机构;501、丝杆;502、二号锥齿轮;503、一号移动块;504、二号移动块。
具体实施方式
22.下面将结合本实用新型实施例中的附图,对本实用新型实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本实用新型一部分实施例,而不是全部的实施例。基于本实用新型中的实施例,本领域普通技术人员在没有做出创造性劳动前提下
所获得的所有其他实施例,都属于本实用新型保护的范围。
23.在本实用新型的描述中,需要说明的是,术语“中心”、“上”、“下”、“左”、“右”、“竖直”、“水平”、“内”、“外”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本实用新型和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本实用新型的限制。此外,术语“第一”、“第二”、“第三”仅用于描述目的,而不能理解为指示或暗示相对重要性。在本实用新型的描述中,需要说明的是,除非另有明确的规定和限定,术语“安装”、“相连”、“连接”、“设置”应做广义理解,例如,可以是固定连接,也可以是可拆卸连接,或一体地连接;可以是机械连接,也可以是电连接;可以是直接相连,也可以通过中间媒介间接相连,可以是两个元件内部的连通。对于本领域的普通技术人员而言,可以具体情况理解上述术语在本实用新型中的具体含义。下面根据本实用新型的整体结构,对其实施例进行说明。
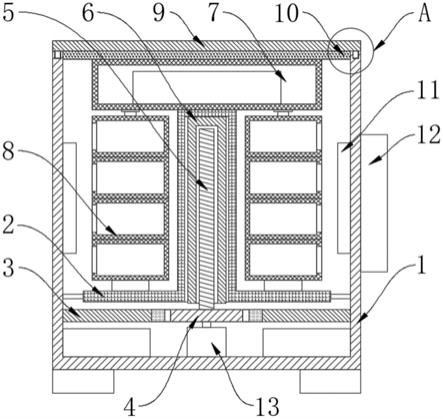
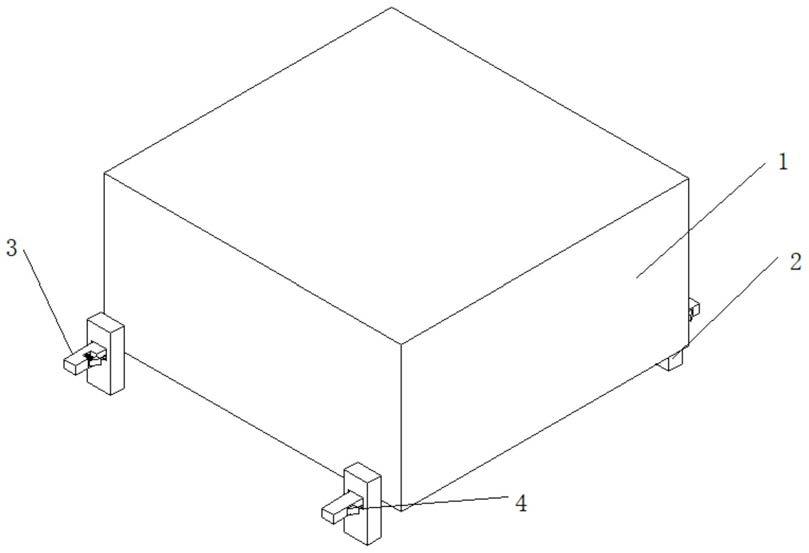
24.请参阅图1~5,本实用新型实施例中,一种人工智能防震装置,包括驱动座1,驱动座1两侧的底端位置处设置有固定块2,固定块2的内壁设置有固定槽4,固定槽4的内壁设置有固定机构3,两个固定机构3之间的位置处设置有转动机构5。
25.请着重参阅图2
‑
4,固定机构3包括有一号转动杆301、一号锥齿轮302、传送带303、一号滚轮304、二号转动杆305、齿轮306、固定臂307、二号滚轮308、一号斜块309、连接臂310、二号斜块311和弹簧312,一号锥齿轮302位于一号转动杆301的外壁上端,二号滚轮308位于一号转动杆301的外壁且位于一号锥齿轮302下方位置处,传送带303位于二号滚轮308的外壁,一号滚轮304位于传送带303的内壁且靠近二号滚轮308一侧的位置处,二号转动杆305位于一号滚轮304的上端,齿轮306位于二号转动杆305的上端,固定臂307位于齿轮306一端的位置处,一号斜块309位于固定臂307的一端,连接臂310位于一号斜块309的一侧,弹簧312位于固定臂307的内壁,二号斜块311位于弹簧312的一端,方便对驱动座1进行固定。
26.请着重参阅图2
‑
5,转动机构5包括有丝杆501、二号锥齿轮502、一号移动块503和二号移动块504,丝杆501位于驱动座1的一侧位置处,二号锥齿轮502位于丝杆501的外壁,一号移动块503位于丝杆501的外壁,二号移动块504位于丝杆501的外壁靠近二号锥齿轮502一侧的位置处,方便固定臂307进入固定槽4内壁,从而实现驱动座1与固定块2固定的功能。
27.请着重参阅图2
‑
4,连接臂310的一端与一号斜块309固定连接,连接臂310的另一端与二号斜块311固定连接,一号斜块309的一端也设置有弹簧312,方便连接臂310移动的同时挤压一号斜块309和二号斜块311。
28.请着重参阅图2
‑
4,固定臂307两两对称共设置有四组,固定臂307的外壁一端设置有与齿轮306相啮合的齿条,齿轮306位于两个固定臂307之间的位置处并与两个固定臂307一端的齿条啮合,方便四组固定臂307均从固定块2的一侧穿插至固定块2的另一侧,方便齿轮306转动带动固定臂307移动。
29.请着重参阅图2
‑
5,一号移动块503与二号移动块504的内壁均设置有与丝杆501外螺纹相匹配的内螺纹,二号锥齿轮502与一号锥齿轮302相啮合,方便丝杆501转动的同时带动一号移动块503和二号移动块504同步移动,方便二号锥齿轮502转动带动一号锥齿轮302转动。
30.请着重参阅图1
‑
5,固定块2共设置有四组,四个所述固定块2两两之间的间距大于
驱动座1的长宽,方便驱动座1进入方形内并同时使四组固定臂307均从固定块2的一侧穿插至固定块2的另一侧。
31.本实用新型的工作原理是:当人工智能防震装置使用时,将驱动座1移动至四组固定块2之间的位置处,转动丝杆501,丝杆501转动使一号移动块503和二号移动块504向一号锥齿轮302位置移动,丝杆501转动带动二号锥齿轮502转动,二号锥齿轮502转动带动一号锥齿轮302转动,一号锥齿轮302转动带动一号转动杆301转动,一号转动杆301转动使二号滚轮308转动,二号滚轮308转动带动传送带303转动,传送带303转动带动两组一号滚轮304同步转动,一号滚轮304转动带动齿轮306转动,齿轮306转动使齿轮306与固定臂307一端的齿条啮合,从而使固定臂307移动,四组固定臂307同步移动使四组固定臂307从固定块2的一侧位置处经固定槽4移动至固定块2的另一侧位置处,固定臂307移动的同时,二号斜块311与固定槽4内壁相接触,受挤压影响弹簧312回缩,从而使二号斜块311回缩,二号斜块311回缩同时带动连接臂310移动,连接臂310移动使一号斜块309回缩,当二号斜块311移动至固定块2的另一端位置处时,二号斜块311和弹簧312均弹出,二号斜块311弹出带动连接臂310移动,连接臂310使一号斜块309回弹,此时二号斜块311位于固定块2一侧的位置处,一号斜块309位于固定块2另一侧的位置处,从而使驱动座1与固定块2固定,从而实现固定仿真迎宾机器人的功能,当需要使驱动座1与固定块2解除固定时,反方向转动丝杆501,一号移动块503和二号移动块504均向初始位置处移动,当一号移动块503与一组连接臂310相接触,二号移动块504与另一组连接臂310相接触时,一号移动块503挤压一组连接臂310,二号移动块504挤压另一组连接臂310,连接臂310受挤压影响移动,从而推动一号斜块309和二号斜块311回缩,受挤压影响,弹簧312回缩,继续反方向转动丝杆501,受转动影响传送带303反转带动齿轮306反转,齿轮306带动固定臂307向初始位置处移动,当固定臂307移动至初始位置处,此时二号斜块311从固定块2另一侧位置处移动至初始位置处,从而实现驱动座1与固定块2解除固定的功能。
32.以上所述的,仅为本实用新型较佳的具体实施方式,但本实用新型的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本实用新型揭露的技术范围内,根据本实用新型的技术方案及其实用新型构思加以等同替换或改变,都应涵盖在本实用新型的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。