1.本发明属于传感器检测领域,尤其涉及基于电感感应耦合原理的一种优化谐振频率检测的方法。
背景技术:
2.感应耦合原理(inductive coupling)是指相互靠近的两个电感由于电磁感应效应发生相互感应或耦合。由于两电感不需要导线直接相连就可以实现信号传递,可以实现无线能量传递和信息传递,所以感应耦合原理目前已经被广泛应用于无线充电、传感器等领域。
3.在传感器领域中,感应耦合原理已经被应用于位移检测、压力检测、流量检测、温湿度检测等诸多检测领域。在这些传感器中,往往是检测lc谐振回路的谐振频率(resonant frequency)作为中间量,从而映射出传感器中待测量的变化。
4.目前对于谐振频率的检测,大都采用扫频的方法。为了获得谐振频率,需要在工作频率范围内按一定的频率间隔发出扫频信号。与即测即得的电压、电流检测相比,检测谐振频率获取单个数据所需的时间较长;而且传感器中的待测量是一个时刻变化的数值,可能受多种因素影响,在单次扫频的过程中也会发生变化,影响谐振频率的计算。并且,为了使获得的结果精度尽可能高,需要减小扫频步进来提高谐振频率的准确度。而当扫频速度受硬件限制保持不变时,较小的扫频步进会导致较长的单次扫频时间,影响数据获取速度的同时,也会导致测试结果因待测量波动产生误差。此外,频率变化的扫频信号对传感系统进行激励时,传感系统的响应有延时,导致某一时刻检测出来的响应特性滞后于信号的发生,计算出的谐振频率发生偏移。总的来说,目前的扫频检测谐振频率的方法存在三点不足:1、单次检测的延时过长,导致在一次扫频的过程中,待检测信号的变化会影响谐振频率的测量;2、扫频步进与扫频时间存在矛盾,导致在有限的测试时间内难以提高测试结果精度;3、传感系统对扫频信号的响应存在延时,导致计算出的谐振频率发生偏移。所以,针对现有谐振频率检测的不足,优化谐振频率检测算法是十分必要的,本发明提出的谐振频率优化检测算法具有巨大的实际应用价值。
技术实现要素:
5.针对现有技术中扫频检测谐振频率方法中存在的不足,本发明提出了一种优化谐振频率检测的方法,解决了待检测信号变化影响谐振频率的测量等的问题
6.本发明的一种优化谐振频率检测的方法,包括如下步骤:
7.步骤1,设置扫频范围[fs,fe]和扫频步进δf进行一次正向扫频;
[0008]
步骤2,根据扫频过程中输出的中间量的变化,判断该次扫频是否存在输出中间量的极值,所述中间量采用电压或电流;
[0009]
如果不存在极值,增大扫频范围和扫频步进,返回步骤1;
[0010]
如果存在极值,则将中间量达到极值时的扫频频率输出为谐振频率点f0;
[0011]
步骤3,进行一次逆向扫频,扫频范围为[fe,fs],扫频步进为δf,判断该次扫频是否存在输出极值;
[0012]
如果不存在极值,增大扫频范围和扫频步进,返回步骤1;
[0013]
如果存在极值,则将中间量达到极值时的扫频频率输出为谐振频率点f1;
[0014]
步骤4,再进行一次正向扫频,根据本次扫频过程中输出的中间量的变化,判断该次扫频是否存在输出极值;
[0015]
如果不存在极值,则增大扫频范围和扫频步进,返回步骤1;
[0016]
如果存在极值,则将中间量达到极值时的扫频频率输出为谐振频率点f2;
[0017]
步骤5,计算最终的谐振频率点:
[0018]
f=(f0 f2 2f1)/4,
[0019]
并判断是否满足:
[0020]f2-f0《3δf
[0021]
如果不满足,则认为本次计算的谐振频率误差较大,将本次计算结果丢弃并返回步骤1;
[0022]
如果满足,则认为本次计算结果有效,输出计算值f,并缩小扫频范围和步进频率,返回步骤1。
[0023]
进一步的,所述增大扫频范围和扫频步进,具体为,fs=f
s-δf
es
,fe=fe δf
es
,有益效果:
[0024]
1)通过相邻两次同向扫频结果的比较,有效减少了扫频期间因待测量波动带来的测量误差;
[0025]
2)扫频范围和步进会根据检测结果动态调整,既保证了系统可以有效运行,又解决了检测时间和扫频范围、扫频步进之间的矛盾;
[0026]
3)采用方向轮替的扫频方案,抵消了系统的延时误差,理想状态下,系统的延时是固定的,则两种扫频方向下,谐振频率的偏移是相等的。因此,通过对两个扫频方向检测出的谐振频率取均值,可以抵消系统的延时误差。
附图说明
[0027]
图1是本发明方法的时序图;
[0028]
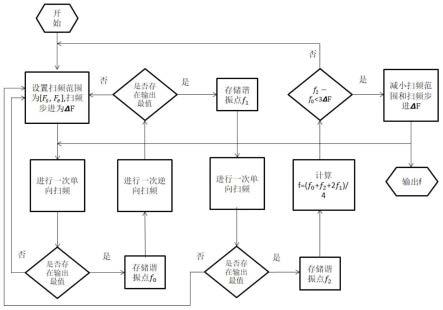
图2是本案发明方法的执行流程图。
具体实施方式
[0029]
本发明的一种优化谐振频率检测的方法,如图2所示,包括如下步骤:
[0030]
步骤1,设置扫频范围[fs,fe]和扫频步进δf进行一次正向扫频;
[0031]
步骤2,根据扫频过程中输出的中间量的变化,判断该次扫频是否存在输出中间量的极值,根据检测场景不同,所述中间量可采用电压或电流,图1所示;如果不存在极值,增大扫频范围和扫频步进重新扫,例如,fs=f
s-δf
es
,fe=fe δf
es
,返回步骤1;
[0032]
如果存在极值,则将中间量达到最极时的扫频频率输出为谐振频率点f0;
[0033]
步骤3,进行一次逆向扫频,扫频范围为[fe,fs],扫频步进为δf,判断该次扫频是否存在输出极值,
[0034]
如果不存在极值,增大扫频范围和扫频步进,fs=f
s-δf
es
,fe=fe δf
es
,返回步骤1;
[0035]
如果存在极值,则将中间量达到极值时的扫频频率输出为谐振频率点f1;
[0036]
步骤4,再进行一次正向扫频,根据本次扫频过程中输出的中间量的变化,判断该次扫频是否存在输出极值;
[0037]
如果不存在极值,则增大扫频范围和扫频步进,fs=f
s-δf
es
,fe=fe δf
es
,返回步骤1;
[0038]
如果存在极值,则将中间量达到极值时的扫频频率输出为谐振频率点f2;
[0039]
步骤5,计算最终的谐振频率点:
[0040]
f=(f0 f2 2f1)/4,
[0041]
并判断是否满足:
[0042]f2-f0《3δf
[0043]
如果不满足,则认为本次计算的谐振频率误差较大,将本次计算结果丢弃并返回步骤1;
[0044]
如果满足,则认为本次计算结果有效,输出计算值f,并缩小扫频范围和步进频率,返回步骤1。
[0045]
综上,本发明利用相邻同向扫频结果的比对来有效减小因待测量波动带来的数据误差;采用根据当前的谐振频率数值,动态调节扫频范围的方法,有效解决了扫频步进与扫频时间之间的矛盾;采用方向轮替的扫频方案来抵消系统的延时误差。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。