1.本发明涉及钻探技术领域,具体是一种钻杆提升机构、辅助连续换钻杆装置及控制方法。
背景技术:
2.动力头式钻机广泛应用于探放水、瓦斯抽采、顶底板注浆、地质构造探查等钻孔的施工。近年来,随着智能化技术的快速发展,智能化水平的不断提升,动力头式钻机也进行了自动化、智能化升级,具有自动换杆装置已成为新一代动力头式钻机的基本配置。动力头式钻机根据不同的使用要求,自动换杆装置的结构也不尽相同。目前,大多数钻机采用由机械手和托盘组成自动换杆装置,结构简单、工作稳定可靠、工人的劳动强度低、换杆效率高。但是受到井下使用条件的限制,钻机所配托盘的尺寸较小,储存的钻杆数量也较少。当托盘中的钻杆使用完毕后,仍需人工进行装填,并未最大限度的解放劳动力、增加了作业辅助时间、在某种程度上影响了钻机的换杆效率。
3.为此,本发明的设计者鉴于上述缺陷,通过潜心研究和设计,综合长期多年从事相关产业的经验和成果,研究设计出一种动力头式钻机辅助连续换钻杆装置及控制方法,以克服上述缺陷。
技术实现要素:
4.本发明的目的是提供一种钻杆提升机构、辅助连续换钻杆装置及控制方法,移动灵活、安全性好及工作可靠。
5.具体的,本发明的方案为:
6.一种钻杆提升机构,设置平台,在所述的平台上设置位置调整机构,在所述的位置调整机构上搭载钻杆传送体,钻杆传送体上搭载钻杆放置座;
7.钻杆放置座沿钻杆传送体传送,钻杆传送体的传送方式为刮板运输;
8.位置调整机构带动钻杆传送体实现三维空间内的位置调节。
9.可选的,所述的钻杆放置座为钻杆提供径向的浮动承托及轴向的夹紧限位;同时钻杆放置座还提供三维空间内的位置调节。
10.可选的,所述的钻杆放置座设置摆动限位台,与所述的摆动限位台台面平行交错插设第一夹紧体和第二夹紧体;
11.第一夹紧体的插设端安装设置第一移动体,第二夹紧体的插设端安装设置第二移动体,第一移动体和第二移动体分别通过夹紧油缸带动第一夹紧体和第二夹紧体实现轴向移动;
12.在所述的摆动限位台下还铰接设置固定台,且固定台与摆动限位台间设置摆动油缸。
13.可选的,在所述的摆动限位台上嵌设多个托柱,托柱下顶设弹簧。
14.可选的,所述的钻杆传送体为“z”字型的刮板运输体;钻杆传送体上设置刮板,钻
杆放置座安装在刮板上;在钻杆传送体的侧部固设直角形的支撑架,钻杆传送体通过支撑架搭载在位置调整机构上。
15.可选的,所述的位置调整机构设置调整油缸,安装在所述的调整油缸上设置升降锁紧机构;升降锁紧机构的端部分别设置第一稳固油缸和第二稳固油缸;且在所述的升降锁紧机构上设置斜拉螺杆组件,用于搭载所述的钻杆传送体。
16.可选的,所述的升降锁紧机构设置中间体,中间体两端连接横梁,横梁端部接设第一抱紧体;第一抱紧体分别套设在第一稳固油缸和第二稳固油缸上;中间体安装在调整油缸上。
17.可选的,所述的斜拉螺杆组件设置依次接设的第二抱紧体和螺柱;第二抱紧体套设在所述的横梁上,所述的螺柱穿设在钻杆传送体上。
18.一种辅助连续换钻杆装置,设置履带车体和钻机平台,在所述的钻机平台上设置钻杆提升机构、转运机构、电控箱、主控阀和电机泵组;所述的钻杆提升机构为本发明的钻杆提升机构。
19.一种辅助连续换钻杆装置控制方法,包含以下步骤:
20.(1)当钻场空间比较大,钻机a进行水平钻孔施工时,钻机a与辅助连续换钻杆装置b可垂直布置,上杆控制方法如下:
21.①
对位:松开升降锁紧机构44中第一抱紧体443的螺栓,通过调整油缸42,使钻杆传送体1的高度高于钻机a的托盘,到达位置后固定第一抱紧体443;
22.②
转杆:钻杆5通过转杆机构b由钻杆箱转运到钻杆放置座3上;
23.③
固杆:通过钻杆放置座3上的夹紧油缸36使第一夹紧体32和第二夹紧体33距离缩小,夹紧钻杆5,此时托柱311在钻杆5的重力下降,弹簧312处于压缩状态;
24.④
升杆:钻杆传送体1开始运转,刮板12带动钻杆放置座3运动;
25.⑤
放杆:当钻杆放置座3到达钻杆传送体1前端时,开口处于水平状态,夹紧油缸36松开,钻杆5在弹簧312恢复力的作用下向外弹出,落到钻机a的托盘上,钻杆放置座3回到初始位置;
26.⑥
上杆:钻机a通过机械手将钻杆5放到回转器和夹持器中间,完成上杆;
27.⑦
重复:重复
①
~
⑥
,完成连续上杆;
28.钻机a完成钻孔施工后,开始进行卸杆:
29.①
对位:调整钻机a的托盘角度,使其斜向下;松开升降锁紧机构44中第一抱紧体443的螺栓,通过调整油缸42,使钻杆传送体1的高度低于钻机a的托盘,到达位置后固定第一抱紧体443;
30.②
滑杆:将钻杆放置座3置于钻杆传送体1的前端,开口处于垂直状态,钻机a通过机械手将钻杆5放到托盘上,通过斜角滑动到钻杆放置座3上;
31.③
固杆:通过钻杆放置座3上的夹紧油缸36使第一夹紧体32和第二夹紧体33距离缩小,夹紧钻杆;
32.④
降杆:钻杆传送体1开始运转,刮板12带动钻杆放置座3运动,到达放置钻杆的初始位置;
33.⑤
转杆:钻杆5通过转杆机构b由钻杆放置座3转运到钻杆箱,钻杆放置座3回到提升主体前端;
34.⑥
重复:重复
①
~
⑤
,完成连续下杆;
35.(2)当钻场空间比较大,钻机a进行仰俯角钻孔施工时,钻机a与辅助连续换钻杆装置(b)可垂直布置,上杆控制方法如下:
36.①
对位:松开升降锁紧机构44中第一抱紧体443的螺栓、斜拉螺杆43中螺柱432上的螺母及第二抱紧体431的螺栓,通过两个调整油缸42不同的上升高度,使钻杆传送体1的倾斜角度与钻机a的主机倾斜角度相同,但高度高于钻机a的托盘,到达位置后固定第一抱紧体443、第二抱紧体431及斜拉螺杆43的螺母;
37.②
转杆:由于钻杆传送体1倾斜,需调整钻杆放置座3的摆动油缸35使其上部的摆动限位台31水平,此时通过转杆机构b将钻杆5由钻杆箱转运到钻杆放置座3上;
38.③
固杆:通过钻杆放置座3上的夹紧油缸36使第一夹紧体32和第二夹紧体33距离缩小,夹紧钻杆,此时托柱311在钻杆5的重力下降,弹簧312处于压缩状态;
39.④
升杆:钻杆传送体1开始运转,刮板12带动钻杆放置座3运动;与此同时钻杆放置座3中的摆动限位台31在摆动油缸35的作用下运动,使摆动限位台31的倾斜角度与钻杆传送体1相同;
40.⑤
放杆:当钻杆放置座3到达钻杆传送体1前端时,开口处于相对水平状态,夹紧油缸36松开,钻杆5在弹簧312恢复力的作用下向外弹出,落到钻机a的托盘上,与此同时钻杆放置座3在内部摆动油缸35的作用下使摆动限位台31水平,并在刮板12的作用下回到初始位置;
41.⑥
上杆:钻机a通过机械手将钻杆5放到回转器和夹持器中间,完成上杆;
42.⑦
重复:重复
①
~
⑥
,完成连续上杆;
43.钻机a完成钻孔施工后,开始进行卸杆:
44.①
对位:调整钻机a的托盘角度,使其斜向下;松开升降锁紧机构44中第一抱紧体443的螺栓、斜拉螺杆43中螺柱432上的螺母及第二抱紧体431的螺栓,通过两个调整油缸42不同的下降高度,使钻杆传送体1的倾斜角度与钻机a的主机倾斜角度相同,但高度低于钻机a的托盘,到达位置后固定第一抱紧体443、第二抱紧体431及斜拉螺杆43的螺母;
45.②
滑杆:将钻杆放置座3置于钻杆传送体1的前端,摆动限位台31角度与钻机a的主机倾角相同,钻机a通过机械手将钻杆5放到托盘上,通过斜角滑动到钻杆放置座3上;
46.③
固杆:通过钻杆放置座3上的夹紧油缸36使第一夹紧体32和第二夹紧体33距离缩小,夹紧钻杆;
47.④
降杆:钻杆传送体1开始运转,刮板12带动钻杆放置座3运动到初始位置,与此同时摆动限位台31在摆动油缸35的作用下处于水平;
48.⑤
转杆:钻杆5通过转杆机构b由钻杆放置座3转运到钻杆箱,钻杆放置座3回到提升主体前端;
49.⑥
重复:重复
①
~
⑤
,完成连续下杆;
50.(2)当钻场空间比较小,钻机a与辅助连续换钻杆装置b可平行布置,换杆控制方法与两机垂直布置时相同,增加回转步骤,具体包括:
51.上杆控制方法,在
④
升杆过程中增加钻杆传送体1在回转机构22的作用下旋转90
°
,
⑤
放杆过程中增加钻杆传送体1在回转机构22的作用下回至初始位置;
52.下杆控制方法,在
②
滑杆过程中增加钻杆传送体1在回转机构22的作用下旋转
90
°
,
④
降杆中增加钻杆传送体1在回转机构22的作用下回至初始位置。
53.本发明的有益效果是:
54.具有移动灵活、安全性好、工作可靠的特点;具有多个自由度,可根据场地空间灵活布置,巷道适应性强;无需人工进行装填,最大限度的解放劳动力,减小了作业辅助时间,提高钻机的换杆效率。
附图说明
55.附图是用来提供对本公开的进一步理解,并且构成说明书的一部分,与下面的具体实施方式一起用于解释本公开,但并不构成对本公开的限制。在附图中:
56.图1为本发明的钻杆提升机构结构示意图;
57.图2为图1中的钻杆放置座结构立体图;
58.图3为图2的纵向剖视图;
59.图4为图1中的钻杆传送体的结构示意图;
60.图5为图1中的升降锁紧机构结构示意图;
61.图6为图1中的斜拉螺杆组件结构示意图;
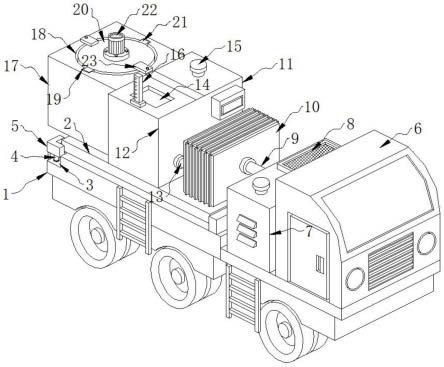
62.图7为本发明的辅助连续换钻杆装置结构示意图;
63.图8为本发明的辅助连续换钻杆装置与钻机配合实现连续换钻杆工况图(行进方向垂直);
64.图9为本发明的辅助连续换钻杆装置与钻机配合实现连续换钻杆工况图(行进方向平行);
65.图中各标号表示为:
66.1-钻杆传送体、11-支撑架、12-刮板、2-平台、21-稳固座、22-回转机构、3-钻杆放置座、31-摆动限位台、311-托柱、312-弹簧、32-第一夹紧体、33-第二夹紧体、34-固定台、35-摆动油缸、36-夹紧油缸、37-第一移动体、38-第二移动体、4-位置调整机构、41-第一稳固油缸、42-调整油缸、43-斜拉螺杆组件、431-第二抱紧体、432-螺柱、44-升降锁紧机构、441-中间体、442-横梁、443-第一抱紧体、45-第二稳固油缸;5-钻杆;
67.a-钻杆提升机构、b-转运机构、c-电控箱、d-钻机平台、e-履带车体、f-主控阀、g-电机泵组;
68.a-钻机、b-辅助连续换钻杆装置。
具体实施方式
69.为了使本发明的目的、技术方案和优点更加清楚,下面将结合实施例对本发明作进一步地详细描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其它实施例,都属于本发明保护的范围。
70.结合图1-6,本发明的钻杆提升机构,设置平台2,在平台2上设置位置调整机构4,在位置调整机构4上搭载钻杆传送体1,钻杆传送体1上搭载钻杆放置座3;钻杆放置座3沿钻杆传送体1传送,钻杆传送体1的传送方式为刮板运输;位置调整机构4带动钻杆传送体1实现三维空间内的位置调节。本发明提到的三维空间内的位置调节,包括纵向(y向)的高低调
节,横向(x向)的倾斜角度,垂直于横向(z向)的偏转角度,实现多种角度及高度的位置调节,灵活的适用于现场操作。刮板输送的工作原理是,将敞开的溜槽,作为煤炭、矸石或物料等的承受件,将刮板固定在链条上(组成刮板链),作为牵引构件。当机头传动部启动后,带动机头轴上的链轮旋转,使刮板链循环运行带动物料沿着溜槽移动,直至到机头部卸载。刮板链绕过链轮作无级闭合循环运行,完成物料的输送。本发明中使用的刮板输送即采用该原理,实现钻杆放置座3沿钻杆传送体1的传送,同时配合位置调整机构4的三维角度的调节,实现钻杆传送体1、钻杆放置座3和其上的钻杆5的传送角度的调节,以适应不同位置的钻机a。
71.在本公开的实施例中,钻杆放置座3为钻杆提供径向的浮动承托及轴向的夹紧限位;同时钻杆放置座3还提供三维空间内的位置调节,这里的三维空间位置调节主要通过油缸的伸长和缩短实现水平平台的相对位置调节,属于钻杆位置的微调,在配合钻杆传送体1的大的位置调节基础,钻杆5在放置到钻杆放置座3上后,不仅可以沿轴向夹紧,同时在轴向夹紧力解除后,通过浮动的承托作用自然将钻杆5弹出,卸载到对应的钻机a上。
72.在本公开的实施例中,钻杆放置座3设置摆动限位台31,与摆动限位台31台面平行交错插设第一夹紧体32和第二夹紧体33;第一夹紧体32的插设端安装设置第一移动体37,第二夹紧体33的插设端安装设置第二移动体38,第一移动体37和第二移动体38分别通过夹紧油缸36带动第一夹紧体32和第二夹紧体33实现轴向移动;在摆动限位台31下还铰接设置固定台34,且固定台34与摆动限位台31间设置摆动油缸35。固定台34和摆动限位台31之间采用销轴连接,并通过摆动油缸35实现相对位置变化,摆动油缸35的活塞杆端与摆动限位台31销轴连接,缸筒端通过中间铰轴与固定台34连接;具体的,结合图2,摆动限位台31主要由侧板、底板、托板、若干筋板及油缸座组成,比如四个侧板沿四个角设置,托板在第一层,底板在第二层;侧板上部有异形槽,槽下部为矩形,宽度大于钻杆5的直径,槽的上部呈v形布置,倾角为45
°
;侧板中部有上、下两个矩形孔,矩形孔的尺寸比第一夹紧体32或第二夹紧体33所用板材尺寸略大,方便两夹板移动,且根据使用要求,上、下矩形孔的高度差为30mm;侧板下部有左右两侧有两个异形孔,方便夹紧油缸36通过;底板上有夹紧油缸36和摆动油缸35的油缸座和矩形槽。矩形槽的宽度为22mm,高度为20mm;第一夹紧体32或第二夹紧体33呈l型,上面有钻杆卡座;钻杆卡座为圆柱体,且顶端倒圆角;第一夹紧体32与第二夹紧体33的高度差与侧板上两矩形孔的高度差相等,均为30mm;第一夹紧体32上存在窄形槽,窄形槽呈方形或矩形,方便第一移动体37移动;第二移动体38和第一移动体37组成基本相同,包括横板竖板及油缸座。横板上有4个圆形通孔,与第一夹紧体32或第二夹紧体33通过螺栓连接;第二移动体38和第一移动体37的竖板高度差与侧板36上两矩形孔的高度差相等,均为30mm;竖板的厚度为20mm,可在底板的矩形槽内滑动,矩形槽起到导向、定位作用;固定台34上有用于固定摆动油缸35的半圆形座,半圆形座的内圆直径与摆动油缸35铰接轴直径相同。
73.在本公开的实施例中,在摆动限位台31上嵌设多个托柱311,托柱311下顶设弹簧312。摆动限位台31的托板焊接于侧板上部异形槽的底部,且上面有三个柱型沉孔,托柱311通过螺母将弹簧312固定在柱型沉孔内。
74.在本公开的实施例中,钻杆传送体1为“z”字型的刮板运输体;钻杆传送体1上设置刮板12,钻杆放置座3安装在刮板12上;在钻杆传送体1的侧部固设直角形的支撑架11,钻杆
传送体1通过支撑架11搭载在位置调整机构4上。钻杆传送体1内均布有若干刮板12,刮板12为铸造件或钢件,上面均布有3个通孔,支撑架11为硬管弯曲成形,左右两侧对称布置,支撑架11与钻杆传送体1采用螺栓连接或直接焊接;钻杆放置座3通过三个螺栓固定在钻杆传送体1的刮板12上,钻杆传送体1通过4个斜拉螺杆组件43连接到升降锁紧机构44上;平台2下的四个角分别设置有稳固座21,且平台2下设置回转机构22。
75.在本公开的实施例中,位置调整机构4设置调整油缸42,安装在调整油缸42上设置升降锁紧机构44;升降锁紧机构44的端部分别设置第一稳固油缸41和第二稳固油缸45;且在升降锁紧机构44上设置斜拉螺杆组件43,用于搭载所述的钻杆传送体1。第一稳固油缸41和第二稳固油缸45的缸筒端通过8个螺栓固定在平台2上,活塞杆端连接有稳固座;升降锁紧机构44可在第一稳固油缸41和第二稳固油缸45的缸筒上通过调整油缸42的控制上下滑动;斜拉螺杆组件43主要通过穿设在支撑架11上实现搭载钻杆传送体1。
76.在本公开的实施例中,升降锁紧机构44设置中间体441,中间体441两端连接横梁442,横梁442端部接设第一抱紧体443;第一抱紧体443分别套设在第一稳固油缸41和第二稳固油缸42上;中间体441安装在调整油缸42上。升降锁紧机构44的中间体441为矩形体,下部开口,上部有用于固定调整油缸42的6个通孔;第一抱紧体443内部圆形直径可以通过螺栓进行调整,升降锁紧机构44到达指定位置后,通过紧固件进行锁定;升降锁紧机构44可在第一稳固油缸41和第二稳固油缸45的缸筒上通过调整油缸42的控制上下滑动;调整油缸42的活塞杆端固定在中间体441上,缸筒端固定在平台2上。
77.在本公开的实施例中,斜拉螺杆组件43设置依次接设的第二抱紧体431和螺柱432;第二抱紧体431套设在横梁442上,螺柱432穿设在钻杆传送体1上。螺柱432的长度可以根据使用条件调整;螺柱432穿设在支撑架11的杆体上,同时端部通过垫块和螺栓固定,垫块为一面是圆弧面且设置中心孔的块体,中心孔的直径比螺杆的直径大2mm,圆弧面的直径与横梁442的直径相同,可以实现钻杆传送体1在位置调整机构4上的牢固搭载。
78.结合图7,本发明的辅助连续换钻杆装置b,设置履带车体e和钻机平台d,在钻机平台d上设置钻杆提升机构a、转运机构b、电控箱c、主控阀f和电机泵组g;钻杆提升机构a为本发明中提到的钻杆提升机构。
79.结合图8和9,本发明的辅助连续换钻杆装置控制方法,包含以下步骤:
80.(1)当钻场空间比较大,钻机a进行水平钻孔施工时,钻机a与辅助连续换钻杆装置b可垂直布置,上杆控制方法如下:
81.①
对位:松开升降锁紧机构44中第一抱紧体443的螺栓,通过调整油缸42,使钻杆传送体1的高度高于钻机a的托盘,到达位置后固定第一抱紧体443;
82.②
转杆:钻杆5通过转杆机构b由钻杆箱转运到钻杆放置座3上;
83.③
固杆:通过钻杆放置座3上的夹紧油缸36使第一夹紧体32和第二夹紧体33距离缩小,夹紧钻杆5,此时托柱311在钻杆5的重力下降,弹簧312处于压缩状态;
84.④
升杆:钻杆传送体1开始运转,刮板12带动钻杆放置座3运动;
85.⑤
放杆:当钻杆放置座3到达钻杆传送体1前端时,开口处于水平状态,夹紧油缸36松开,钻杆5在弹簧312恢复力的作用下向外弹出,落到钻机a的托盘上,钻杆放置座3回到初始位置;
86.⑥
上杆:钻机a通过机械手将钻杆5放到回转器和夹持器中间,完成上杆;
87.⑦
重复:重复
①
~
⑥
,完成连续上杆;
88.钻机a完成钻孔施工后,开始进行卸杆:
89.①
对位:调整钻机a的托盘角度,使其斜向下;松开升降锁紧机构44中第一抱紧体443的螺栓,通过调整油缸42,使钻杆传送体1的高度低于钻机a的托盘,到达位置后固定第一抱紧体443;
90.②
滑杆:将钻杆放置座3置于钻杆传送体1的前端,开口处于垂直状态,钻机a通过机械手将钻杆5放到托盘上,通过斜角滑动到钻杆放置座3上;
91.③
固杆:通过钻杆放置座3上的夹紧油缸36使第一夹紧体32和第二夹紧体33距离缩小,夹紧钻杆;
92.④
降杆:钻杆传送体1开始运转,刮板12带动钻杆放置座3运动,到达放置钻杆的初始位置;
93.⑤
转杆:钻杆5通过转杆机构b由钻杆放置座3转运到钻杆箱,钻杆放置座3回到提升主体前端;
94.⑥
重复:重复
①
~
⑤
,完成连续下杆;
95.(2)当钻场空间比较大,钻机a进行仰俯角钻孔施工时,钻机a与辅助连续换钻杆装置(b)可垂直布置,上杆控制方法如下:
96.①
对位:松开升降锁紧机构44中第一抱紧体443的螺栓、斜拉螺杆43中螺柱432上的螺母及第二抱紧体431的螺栓,通过两个调整油缸42不同的上升高度,使钻杆传送体1的倾斜角度与钻机a的主机倾斜角度相同,但高度高于钻机a的托盘,到达位置后固定第一抱紧体443、第二抱紧体431及斜拉螺杆43的螺母;
97.②
转杆:由于钻杆传送体1倾斜,需调整钻杆放置座3的摆动油缸35使其上部的摆动限位台31水平,此时通过转杆机构b将钻杆5由钻杆箱转运到钻杆放置座3上;
98.③
固杆:通过钻杆放置座3上的夹紧油缸36使第一夹紧体32和第二夹紧体33距离缩小,夹紧钻杆,此时托柱311在钻杆5的重力下降,弹簧312处于压缩状态;
99.④
升杆:钻杆传送体1开始运转,刮板12带动钻杆放置座3运动;与此同时钻杆放置座3中的摆动限位台31在摆动油缸35的作用下运动,使摆动限位台31的倾斜角度与钻杆传送体1相同;
100.⑤
放杆:当钻杆放置座3到达钻杆传送体1前端时,开口处于相对水平状态,夹紧油缸36松开,钻杆5在弹簧312恢复力的作用下向外弹出,落到钻机a的托盘上,与此同时钻杆放置座3在内部摆动油缸35的作用下使摆动限位台31水平,并在刮板12的作用下回到初始位置;
101.⑥
上杆:钻机a通过机械手将钻杆5放到回转器和夹持器中间,完成上杆;
102.⑦
重复:重复
①
~
⑥
,完成连续上杆;
103.钻机a完成钻孔施工后,开始进行卸杆:
104.①
对位:调整钻机a的托盘角度,使其斜向下;松开升降锁紧机构44中第一抱紧体443的螺栓、斜拉螺杆43中螺柱432上的螺母及第二抱紧体431的螺栓,通过两个调整油缸42不同的下降高度,使钻杆传送体1的倾斜角度与钻机a的主机倾斜角度相同,但高度低于钻机a的托盘,到达位置后固定第一抱紧体443、第二抱紧体431及斜拉螺杆43的螺母;
105.②
滑杆:将钻杆放置座3置于钻杆传送体1的前端,摆动限位台31角度与钻机a的主
机倾角相同,钻机a通过机械手将钻杆5放到托盘上,通过斜角滑动到钻杆放置座3上;
106.③
固杆:通过钻杆放置座3上的夹紧油缸36使第一夹紧体32和第二夹紧体33距离缩小,夹紧钻杆;
107.④
降杆:钻杆传送体1开始运转,刮板12带动钻杆放置座3运动到初始位置,与此同时摆动限位台31在摆动油缸35的作用下处于水平;
108.⑤
转杆:钻杆5通过转杆机构b由钻杆放置座3转运到钻杆箱,钻杆放置座3回到提升主体前端;
109.⑥
重复:重复
①
~
⑤
,完成连续下杆;
110.(2)当钻场空间比较小,钻机a与辅助连续换钻杆装置b可平行布置,换杆控制方法与两机垂直布置时相同,增加回转步骤,具体包括:
111.上杆控制方法,在
④
升杆过程中增加钻杆传送体1在回转机构22的作用下旋转90
°
,
⑤
放杆过程中增加钻杆传送体1在回转机构22的作用下回至初始位置;下杆控制方法,在
②
滑杆过程中增加钻杆传送体1在回转机构22的作用下旋转90
°
,
④
降杆中增加钻杆传送体1在回转机构22的作用下回至初始位置。具体的过程主要通过回转机构22带动平台2实现整体的回转,从而带动钻杆传送体1实现回转角度调节,平台2下四个角上设置的稳固座21,可以是稳固油缸结构,进行回转操作时,稳固座21收回不与钻机平台d接触,然后操作回转机构22实现回转操作,回转操作完成后,可以根据实际工况,调节稳固座21的伸长长度,实现对平台2的稳固支撑。
112.本发明辅助连续换杆装置移动灵活、安全性好、工作可靠;具有多个自由度,可根据场地空间灵活布置,巷道适应性强;工作时无需人工进行装填,最大限度的解放劳动力,减小了作业辅助时间,提高钻机的换杆效率。
113.以上所述,仅是本发明的较佳实例而已,并非对本发明作任何形式上的限制,凡是依据本发明的技术实质对以上实例作的任何简单修改、等同变化和修饰,均仍属于本发明技术方案的范围内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。