1.本发明涉及人工智能的技术领域,具体地,涉及一种用于康复的穿戴式水下外骨骼机器人及其使用方法。
背景技术:
2.康复理疗又称康复物理治疗,是集运动治疗、作业治疗、言语治疗、物理治疗、针灸、拨罐、按摩于一体的综合性治疗方式。运动治疗是通过被动运动疗法、主动运动疗法和抗阻力、运动疗法,从而对病人身体的功能障碍和功能低下起到预防、改善和恢复作用的一种特殊疗法。
3.病人通常存在一个或多个部位无法自主运动的功能障碍问题,因此,在对病人进行运动治疗时,尤其是进行被动物理康复治疗时,水下康复却鲜有可见,水生环境具有广泛的康复潜力,从治疗急性损伤到在面对慢性病时保持健康。水中康复治疗的定义:是指一种以水为治疗媒介来治疗疾病或帮助机体重获功能的特殊物理治疗操作方法,水中康复治疗主要通过水中物理运动疗法进行治疗,水中物理运动疗法主要包括:平衡训练,力量和稳定性训练,心血管调节,游泳优化,关节活动范围或灵活性练习。由于其广泛的治疗安全性和临床适应性,在康复工具箱里水疗法是一个非常有用的工具,但它仍然是一种未得到充分利用的方式。
4.现有的水下康复方式一般都是水下较低防护的走路式康复,对助于病人康复的效果一般。经现有技术检索发现,中国发明专利公布号为cn111297634a,公开了一种桶闸型湿式下肢康复训练装置,包括底座,在底座上设置有水槽,水槽上设置有循环水泵,循环水泵连接至控制器,水槽后壁上开始有循环喷水口,在水槽的前端设置有桶形蓄水舱闸门,所述的筒形密封仓闸门包括左右两段弧形闸门框,在弧形闸门框中转动设置有桶形闸,桶形闸的周面上具有一u形口,在u形口上密封铰接有弧形门,在桶形闸下设置有圆形回转轨,圆形回转轨的外环固定设置,桶形闸与内环固定连接,在桶形闸下部固定连接有中心轴,与中心轴配合设置有转动驱动装置,在康复训练装置内设置有排水泵。该专利技术就存在上述相关问题。
技术实现要素:
5.针对现有技术中的缺陷,本发明的目的是提供一种用于康复的穿戴式水下外骨骼机器人及其使用方法。
6.根据本发明提供的一种用于康复的穿戴式水下外骨骼机器人,包括基础装置,所述基础装置上设置有传感机构、控制机构、驱动机构以及用于为人体在运动时助力的执行机构;
7.所述传感机构与所述控制机构电信号连接,所述控制机构用于接收处理所述传感机构发送来的运动数据并下达给所述驱动机构,所述控制机构与所述驱动机构电信号连接,所述驱动机构与所述执行机构电信号连接,且所述驱动机构驱动所述执行机构运动;
8.所述基础装置包括腰部紧固件和腿部紧固件,所述腰部紧固件与所述下肢紧固件分别贴合设置在人体上;所述执行机构包括腰部外骨骼、腿部外骨骼以及水下推进器,所述腰部外骨骼设置在所述腰部紧固件上,所述腿部外骨骼设置在所述腿部紧固件上,所述水下推进器向着人体前进方向进行推进。
9.一些实施方式中,所述传感机构包括肌电传感器、生理检测器以及无线传输器,所述肌电传感器用于采集肌电信号来检测人体的运动状态,所述生理检测装置用于检测人体在水下运动时的身体指标情况,所述肌电传感器设有多个,多个所述肌电传感器分别设置在人体的小腿和大腿上,所述生理检测器设置在人体的胸口处,所述无线接收器设有多个,多个所述无线传输器分别对应多个所述肌电传感器和所述生理检测器设置。
10.一些实施方式中,所述腿部紧固件包括左腿紧固件和右腿紧固件,所述肌电传感器包括大腿传感器和小腿传感器,所述大腿传感器设置在人体的大腿处,所述大腿传感器设有两个,两个所述大腿传感器分别设置在所述左腿紧固件和所述右腿紧固件的上方,所述小腿传感器设置在人体的小腿处,所述小腿传感器设有两个,两个所述小腿传感器分别设置在所述左腿紧固件和所述右腿紧固件的下方。
11.一些实施方式中,所述控制机构设置在所述腰部紧固件上,所述控制机构包括微处理器和无线接收器,所述微处理器与所述无线接收器电信号连接,所述无线接收器用于接收所述无线传输器发出的信息,所述微处理器用于处理所述肌电传感器和所述生理检测装置获取的运动信息,所述微处理器根据所述运动信息和病人的康复状况并相对应的控制所述执行机构工作。
12.一些实施方式中,所述存储机构包括存储器,所述存储器用于整理保存病人在不同康复阶段的不同的康复方案,所述存储器与所述微处理器电信号连接。
13.一些实施方式中,所述水下推进器上连接设置有推进器驱动电机和推进器蓄电池,所述水下推进器设置在人体背部。
14.一些实施方式中,所述驱动机构包括驱动器,所述驱动器接收所述控制机构的指令并控制所述执行机构工作。
15.一些实施方式中,所述腰部紧固件上设置有电池组,所述电池组为外骨骼机器人的整个用电系统提供电能。
16.一些实施方式中,所述防水机构包括防水外壳,所述防水外壳设置在所述腰部紧固件上,且所述防水外壳保护所述控制机构、所述驱动机构以及所述电池组设置。
17.本发明还提供一种用于康复的穿戴式水下外骨骼机器人的使用方法,步骤1.所述传感机构中的肌电传感器分别检测病人的两个大腿和两个小腿的运动状态,所述传感机构中的生理检测装置检测病人的生理指标;
18.步骤2.通过所述肌电传感器和所述生理检测装置上连接的多个无线传输器将检测的运动状态数据和生理指标数据传输到所述控制机构,所述控制机构的无线接收器将运动状态数据和生理指标数据传输至所述控制机构中的微处理器;
19.步骤3.所述微处理器收到运动状态数据和生理指标数据并调用存储器中的数据进行分析对比,得到病人的康复状况,形成康复方案,并将控制指令发送给所述驱动机构;
20.步骤4.所述驱动机构分别驱动人体上贴合的外骨骼和小型推进器工作,助力病人在水下康复训练。
21.与现有技术相比,本发明具有如下的有益效果:
22.1、本发明通过设置传感机构,传感机构检测病人的运动状态和生理指标状况,并由控制机构对传感机构检测到的信息做分析和处理,从而控制执行模块工作并对在康复训练的病人进行助力,从而减轻病人的能量消耗,有助于提高病人在水下康复的训练时长;
23.2、本发明设置控制机构、存储机构以及传感机构,控制机构通过存储机构和传感机构传出的信息,给出病人在不同康复阶段的不同康复方案,控制执行机构给出实时有效地助力,更有助于病人的康复训练,提高病人的康复效率。
附图说明
24.通过阅读参照以下附图对非限制性实施例所作的详细描述,本发明的其它特征、目的和优点将会变得更明显:
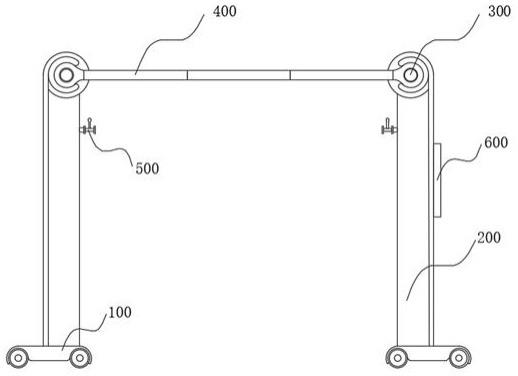
25.图1为本发明用于康复的穿戴式水下外骨骼机器人的正视示意图;
26.图2为本发明用于康复的穿戴式水下外骨骼机器人的侧视示意图;
27.图3为本发明用于康复的穿戴式水下外骨骼机器人腰部的局部放大图;
28.图4为本发明用于康复的穿戴式水下外骨骼机器人的系统原理图;
29.附图标记:
30.具体实施方式
31.下面结合具体实施例对本发明进行详细说明。以下实施例将有助于本领域的技术人员进一步理解本发明,但不以任何形式限制本发明。应当指出的是,对本领域的普通技术人员来说,在不脱离本发明构思的前提下,还可以做出若干变化和改进。这些都属于本发明的保护范围。
32.如图1所示为用于康复的穿戴式水下外骨骼机器人的正视示意图,如图2所示为用于康复的穿戴式水下外骨骼机器人的侧视示意图,用于康复的穿戴式水下外骨骼机器人,包括基础装置1,基础装置1上设置有传感机构、控制机构、驱动机构以及用于为人体在运动时助力的执行机构。
33.如图4所示为用于康复的穿戴式水下外骨骼机器人的系统原理图,传感机构与控
制机构电信号连接,控制机构用于接收处理传感机构发送来的运动数据并下达给驱动机构,控制机构与驱动机构电信号连接,驱动机构与执行机构电信号连接,且驱动机构驱动执行机构运动。
34.基础装置1包括腰部紧固件12和腿部紧固件11,腰部紧固件12与下肢紧固件分别贴合设置在人体上;执行机构包括腰部外骨骼、腿部外骨骼以及水下推进器8,腰部外骨骼设置在腰部紧固件12上,腿部外骨骼设置在腿部紧固件11上,水下推进器8向着人体前进方向进行推进。
35.传感机构包括肌电传感器4、生理检测器6以及无线传输器3,肌电传感器4用于采集肌电信号来检测人体的运动状态,生理检测装置用于检测人体在水下运动时的身体指标情况,肌电传感器4设有多个,多个肌电传感器4分别设置在人体的小腿和大腿上,生理检测器6设置在人体的胸口处,无线接收器16设有多个,多个无线传输器3分别对应多个肌电传感器4和生理检测器6设置。
36.腿部紧固件11包括左腿紧固件2和右腿紧固件5,肌电传感器4包括大腿传感器13和小腿传感器14,大腿传感器13设置在人体的大腿处,大腿传感器13设有两个,两个大腿传感器13分别设置在左腿紧固件2和右腿紧固件5的上方,小腿传感器14设置在人体的小腿处,小腿传感器14设有两个,两个小腿传感器14分别设置在左腿紧固件2和右腿紧固件5的下方。
37.如图3所示为用于康复的穿戴式水下外骨骼机器人腰部的局部放大图,控制机构设置在腰部紧固件12上,控制机构包括微处理器15和无线接收器16,微处理器15与无线接收器16电信号连接,无线接收器16用于接收无线传输器3发出的信息,无线接收器16与无线传输器3采取一对多的工作方式。微处理器15用于处理肌电传感器4和生理检测装置获取的运动信息,微处理器15根据运动信息和存储机构判断病人的康复状况并相对应的控制执行机构工作。
38.存储机构包括存储器17,存储器17用于整理保存病人在不同康复阶段的不同的康复方案,存储器17与微处理器15电信号连接,并存储器17随时由微处理器15调用。水下推进器8上连接设置有推进器驱动电机9和推进器蓄电池10,水下推进器8设置在人体背部。驱动机构包括驱动器19,驱动器19接收控制机构的指令并控制执行机构工作。腰部紧固件12上设置有电池组18,电池组18为外骨骼机器人的整个用电系统提供电能。防水机构包括防水外壳20,防水外壳20设置在腰部紧固件12上,且防水外壳20保护控制机构、驱动机构以及电池组18设置,防止进水被烧坏。
39.用于康复的穿戴式水下外骨骼机器人的使用方法,步骤1.传感机构中的肌电传感器4分别检测病人的两个大腿和两个小腿的运动状态,传感机构中的生理检测装置检测病人的生理指标;
40.步骤2.通过肌电传感器4和生理检测装置上连接的多个无线传输器3将检测的运动状态数据和生理指标数据传输到控制机构,控制机构的无线接收器16将运动状态数据和生理指标数据传输至控制机构中的微处理器15;
41.步骤3.微处理器15收到运动状态数据和生理指标数据并调用存储器17中的数据进行分析对比,得到病人的康复状况,形成康复方案,并将控制指令发送给驱动机构;
42.步骤4.驱动机构分别驱动人体上贴合的外骨骼和小型推进器工作,助力病人在水
下康复训练。
43.在本技术的描述中,需要理解的是,术语“上”、“下”、“前”、“后”、“左”、“右”、“竖直”、“水平”、“顶”、“底”、“内”、“外”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本技术和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本技术的限制。除了以纯计算机可读程序代码方式实现本发明提供的系统、装置及其各个模块以外,完全可以通过将方法步骤进行逻辑编程来使得本发明提供的系统、装置及其各个模块以逻辑门、开关、专用集成电路、可编程逻辑控制器以及嵌入式微控制器等的形式来实现相同程序。所以,本发明提供的系统、装置及其各个模块可以被认为是一种硬件部件,而对其内包括的用于实现各种程序的模块也可以视为硬件部件内的结构;也可以将用于实现各种功能的模块视为既可以是实现方法的软件程序又可以是硬件部件内的结构。
44.以上对本发明的具体实施例进行了描述。需要理解的是,本发明并不局限于上述特定实施方式,本领域技术人员可以在权利要求的范围内做出各种变化或修改,这并不影响本发明的实质内容。在不冲突的情况下,本技术的实施例和实施例中的特征可以任意相互组合。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。