1.本发明属于复合材料自动铺丝成型领域,具体涉及一种复杂曲面的偏移轨迹曲率修正方法。
背景技术:
2.目前,复合材料自动铺丝轨迹规划方法主要包括测地线、变角度与固定角三种。对于复杂曲面多采用变角度算法生成初始轨迹,为了提高效率,通常利用等距偏移的方法批量生成其他铺放轨迹。复杂曲面的曲率变化较大,等距偏移后曲线曲率发生变化,而预浸料纤维方向的可变形量很小,当曲率过大时,则会在铺放过程中产生褶皱,从而影响铺放质量与成型制件的最终性能。
技术实现要素:
3.为解决上述问题,本发明公开了一种复杂曲面的偏移轨迹曲率修正方法,包括以下步骤:
4.s1、将等距偏移后的轨迹曲线l按步长d离散为一系列轨迹点集{ai}(i=1~n),其中n为轨迹点个数,通过将中心轨迹点ai两侧轨迹点(a
i-1
与a
i 1
)投影到中心点切平面m上,得到投影点a
i-1
与a
i 1
,过三点(a
i-1
、a
i 1
与ai)作圆o来检测各个轨迹点处的曲率半径r,获取曲率半径小于1500mm的轨迹点与其位置;
5.s2、找到第一个不符合曲率半径要求(小于1500mm)的轨迹点a
k 1
,在ak点位置将曲线分割开,留下轨迹点曲率均大于1500mm的曲线部分c;
6.s3、将分割后的曲线c重新离散为一系列轨迹点集{bj}(j=1~k),从最后两个轨迹点b
k-1
和bk开始,利用变角度算法生成余下的轨迹点;
7.s4、将各个轨迹点拟合成样条线,并将其投影曲面上,得到完整铺放轨迹线。
8.s5、对轨迹线进行微调,微调方式为:改变设计角度与曲率半径r,设计角度的可调控范围不超过
±
15
°
,曲率半径大于1500mm,重复所述步骤3,对轨迹线进一步迭代优化,保证优化后的轨迹线满足曲率半径要求,同时最大程度保证设计角度。当所述优化后的轨迹线k修补部分与原轨迹线l在某段距离内(小于等于修补部分长度)的法向最大间距小于2mm时,曲率优化完毕。
9.s6、检测优化后的轨迹设计角度是否满足设计要求,若不满足,则在角度不满足要求的轨迹点将曲线分割,重复所述步骤3,多次迭代,直至优化轨迹线修补部分与原轨迹线的法向最大距离小于2mm时结束,该轨迹线即为最终铺放轨迹线。
10.所述s3具体方法如下:
11.设计角度为θ,范围在-90~90
°
,不包括
±
90
°
,参考线为p,过bk点做曲面的切平面m,将b
k-1
点投影到切平面m上获得点b
k-1
,连接b
k-1
与bk两点得到直线x1,过bk点做参考线p的法平面n,将法平面n与切平面m相交得到交线x(该交线即为角度参考线),作与交线x成一定
角度的直线x2,测量直线x1与直线x2之间的夹角α,并根据公式将曲率半径转化为偏差角度得到β,若夹角α与设计角度θ差值在偏差角度
±
β范围内,则取直线x2端点为b
k 1
,若超出偏差范围,则过b
k-1
和bk两点和曲率半径r作圆o,在圆上取与bk点距离为步长d的点b
k 1
,过b
k 1
点做切平面m的法线与曲面相交获得点b
k 1
,即为下一个轨迹点,以此类推或者余下所有轨迹点集{br}(r=k 1~m),m为整个铺放轨迹点个数。
12.7、所述s2:第一个曲率不满足要求的轨迹点处分割曲线,并在分割后曲线的最后两个离散点处重新生成余下轨迹点。
13.8、所述s5、s6:通过改变变角度算法的曲率半径与设计角度,对初步修正后的轨迹进行多次迭代优化,在满足曲率与铺放角度的同时,获得与原轨迹线的法向最大间距小于2mm的最终铺放轨迹。
14.本发明的有益效果:
15.1、本发明利用曲线分割修补、多次迭代优化的方法,将手动和软件自动化相结合,充分考虑模具的外形特点,在满足铺放工艺性与结构设计的同时,大大提高了轨迹的求解速度,减少铺放时丝束之间的搭接与间隙。
16.2、本发明采用变角度算法修补分割曲线,利用参考基准法平面与轨迹点切平面相交的算法得到角度参考线,提高了设计角度的精度,更加符合实际铺放需求,最终使得构件获得优异的力学性能。
附图说明
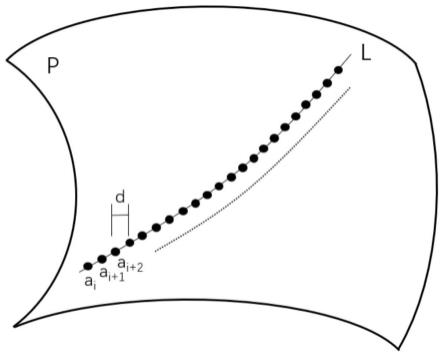
17.图1为等距偏移轨迹线离散点示意图;
18.图2为等距偏移轨迹线曲率检测示意图;
19.图3为偏移轨迹线分割后示意图;
20.图4为变角度算法获得切平面上轨迹点示意图;
21.图5为变角度算法获得铺放曲面上轨迹点示意图;
22.图6为偏移曲线优化后与原曲线对比图。
具体实施方式
23.下面结合附图和具体实施方式,进一步阐明本发明,应理解下述具体实施方式仅用于说明本发明而不用于限制本发明的范围。需要说明的是,下面描述中使用的词语“前”、“后”、“左”、“右”、“上”和“下”指的是附图中的方向,词语“内”和“外”分别指的是朝向或远离特定部件几何中心的方向。
24.本实施例的一种复杂曲面的偏移轨迹曲率修正方法,包括以下步骤:
25.步骤1,将曲面p上等距偏移后的轨迹曲线l按步长d离散为一系列轨迹点集{ai}(i=1~n),如图1所示,其中n为轨迹点个数,通过将中心轨迹点ai两侧轨迹点(ai-1与ai 1)投影到中心点切平面m上,得到投影点ai-1与ai 1,过三点(ai-1、ai 1与ai)作圆o来检测各个轨迹点处的曲率半径r,如图2所示,获取曲率半径小于1500mm的轨迹点与其位置。
26.步骤2,找到第一个不符合曲率半径要求(小于1500mm)的轨迹点ak 1,在ak点位置
将曲线分割开,如图3,留下轨迹点曲率均大于1500mm的曲线部分c(图3实心点连接的曲线部分)。
27.步骤3,将分割后的曲线c重新离散为一系列轨迹点集{bj}(j=1~k),从最后两个轨迹点bk-1和bk开始,利用变角度算法生成余下的轨迹点,如图4所示,具体方法如下:设计角度为θ,范围在-90~90
°
,不包括
±
90
°
,参考线为p,过bk点做曲面的切平面m,将bk-1点投影到切平面m上获得点bk-1,连接bk-1与bk两点得到直线x1,过bk点做参考线p的法平面n,将法平面n与切平面m相交得到交线x,作与交线x成一定角度的直线x2,测量直线x1与直线x2之间的夹角α,并根据公式将曲率半径转化为偏差角度得到β,若夹角α与设计角度θ差值在偏差角度
±
β范围内,如图4(左)所示,则取直线x2端点为bk 1,若超出偏差范围,如图4(右)所示,则过bk-1和bk两点和曲率半径r作圆o,在圆上取与bk点距离为步长d的点bk 1,过bk 1点做切平面m的法线与曲面相交获得点bk 1,即为下一个轨迹点,以此类推或者余下所有轨迹点集{br}(r=k 1~m),m为整个铺放轨迹点个数。
28.步骤4,将各个轨迹点拟合成样条线,并将其投影曲面上,如图5所示,得到完整铺放轨迹线。
29.步骤5,对轨迹线进行微调,微调方式为:改变设计角度与曲率半径r,设计角度的可调控范围不超过
±
15
°
,曲率半径大于1500mm,重复所述步骤3,对轨迹线进一步迭代优化,保证优化后的轨迹线满足曲率半径要求,同时最大程度保证设计角度。当所述优化后的轨迹线k修补部分与原轨迹线l在某段距离内(小于等于修补部分长度)的法向最大间距小于2mm时,曲率优化完毕。
30.步骤6,检测优化后的轨迹设计角度是否满足设计要求,若不满足,则在角度不满足要求的轨迹点将曲线分割,重复所述步骤3,多次迭代,直至优化轨迹线修补部分与原轨迹线的法向最大距离小于2mm时结束,如图6所示,该轨迹线即为最终铺放轨迹线。
31.本发明方案所公开的技术手段不仅限于上述实施方式所公开的技术手段,还包括由以上技术特征任意组合所组成的技术方案。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。