技术特征:
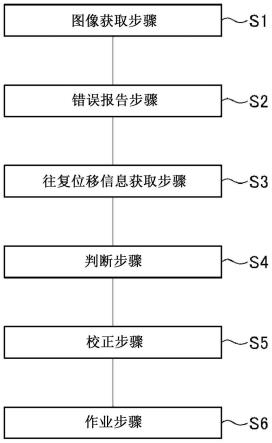
1.一种机器人系统的控制方法,其特征在于,所述机器人系统具有输送对象物的输送装置、以及一边跟随由所述输送装置输送的所述对象物一边进行作业的机器人,所述机器人系统的控制方法包括:图像获取步骤,多次拍摄由所述输送装置输送的所述对象物而获取多个图像;往复位移信息获取步骤,基于所述多个图像得到表示向与所述对象物的输送方向正交的宽度方向周期性地往复位移的往复位移信息;以及校正步骤,基于所述往复位移信息校正所述机器人的位置指令。2.根据权利要求1所述的机器人系统的控制方法,其特征在于,在所述往复位移信息获取步骤中,从全部的所述图像中提取所述宽度方向上的间隔距离最大的两个所述对象物,并基于提取出的两个所述对象物的位置得到所述往复位移信息。3.根据权利要求1或2所述的机器人系统的控制方法,其特征在于,在所述校正步骤中,将所述往复位移信息与所述对象物的所述输送方向上的位置对应起来校正所述位置指令。4.根据权利要求1所述的机器人系统的控制方法,其特征在于,所述机器人系统的控制方法包括判断步骤,在所述判断步骤中,通过输送辊的旋转来驱动带,从而进行所述输送装置的输送,并基于所述输送辊的圆周来判断所述往复位移信息是否适当,所述判断步骤在所述往复位移信息获取步骤之后且在所述校正步骤之前进行。5.根据权利要求4所述的机器人系统的控制方法,其特征在于,在所述图像获取步骤中,拍摄所述图像的范围在所述输送方向上的长度为所述输送辊的圆周以上。6.根据权利要求1所述的机器人系统的控制方法,其特征在于,所述机器人系统的控制方法包括错误报告步骤,所述错误报告步骤在所述图像获取步骤之后进行,在所述图像获取步骤中得到的所述图像的数量比规定值少的情况下报告错误。7.一种机器人系统,其特征在于,具有:输送装置,输送对象物;机器人,一边跟随由所述输送装置输送的所述对象物一边进行作业;拍摄部,拍摄由所述输送装置输送的所述对象物;以及控制装置,基于由所述拍摄部拍摄到的多个图像得到表示向与所述对象物的输送方向正交的宽度方向周期性地往复位移的往复位移信息,并基于所述往复位移信息校正所述机器人的位置指令。
技术总结
本发明提供机器人系统的控制方法及机器人系统,能够一边跟随由输送装置输送的对象物一边高精度地进行作业。机器人系统的控制方法是具有输送对象物的输送装置、以及一边跟随由所述输送装置输送的所述对象物一边进行作业的机器人的机器人系统的控制方法,所述机器人系统的控制方法包括:图像获取步骤,多次拍摄由所述输送装置输送的所述对象物而获取多个图像;往复位移信息获取步骤,基于所述多个图像得到表示向与所述对象物的输送方向正交的宽度方向周期性地往复位移的往复位移信息;以及校正步骤,基于所述往复位移信息校正所述机器人的位置指令。器人的位置指令。器人的位置指令。
技术研发人员:吉井宏治
受保护的技术使用者:精工爱普生株式会社
技术研发日:2022.01.26
技术公布日:2022/7/29
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。