1.本发明涉及工业机器人技术领域,具体而言,为具有机械臂快速装拆功能的工业机器人。
背景技术:
2.工业机器人是面向工业领域的多关节机械手或多自由度的机器装置,它能自动执行工作,是靠自身动力和控制能力来实现各种功能的一种机器,它可以接受人类指挥,也可以按照预先编排的程序运行,现代的工业机器人还可以根据人工智能技术制定的原则纲领行动,工业机器人在工业生产中能代替人做某些单调、频繁和重复的长时间作业,或是危险、恶劣环境下的作业,例如在冲压、压力铸造、热处理、焊接、涂装、塑料制品成形、机械加工和简单装配等工序上,以及在原子能工业等部门中,完成对人体有害物料的搬运或工艺操作,在发达国家中,工业机器人自动化生产线成套设备已成为自动化装备的主流及未来的发展方向。国外汽车行业、电子电器行业、工程机械等行业已经大量使用工业机器人自动化生产线,以保证产品质量,提高生产效率,同时避免了大量的工伤事故。
3.现有的工业机器人机械臂使用较为灵活广泛,然而,现有的工业机器人机械臂体积重量大,为了确保机械臂各金属零部件间连接紧密,一般采用繁琐的锁死构件对其金属零部件进行连接固定,在机械臂出现损坏问题时,对于机械臂零部件的拆装就较为麻烦,增加工人的劳动强度;而且,现有的工业机器人机械臂对物品进行夹持搬运时,夹臂和物品间存在滑脱的现象,物品滑脱掉落摔损造成不必要的经济损失。
4.因此,我们推出具有机械臂快速装拆功能的工业机器人。
技术实现要素:
5.本发明的目的在于提供具有机械臂快速装拆功能的工业机器人,旨在解决上述背景技术中,现有的工业机器人机械臂体积重量大,为了确保机械臂各金属零部件间连接紧密,一般采用繁琐的锁死构件对其金属零部件进行连接固定,在机械臂出现损坏问题时,对于机械臂零部件的拆装较为麻烦,增加工人的劳动强度的问题;以及现有的工业机器人机械臂对物品进行夹持搬运时,夹臂和物品间存在滑脱的现象,物品滑脱掉落摔损造成不必要的经济损失的问题。
6.为实现上述目的,本发明提供如下技术方案:具有机械臂快速装拆功能的工业机器人,包括支撑板和固定连接于支撑板上端的支撑筒,支撑筒顶部活动设置有防护筒,防护筒底部固定连接有斜齿轮组,斜齿轮组与支撑筒外壁上的电机输出端相连接,防护筒底板上端开设有安装槽,安装槽内活动卡合有安装座,安装座底部嵌合安装有电磁铁,安装座两侧的防护筒底板上端固定安装有定位件,定位件压合安装座两侧底部边沿,安装座顶端延伸至防护筒顶部端口上方,安装座顶部固定连接有升降座,升降座顶端固定连接有气动直线滑轨,气动直线滑轨内的通槽内活动卡合有气动滑块,气动滑块底部固定连接有夹持组件;
7.定位件包括固定连接于防护筒两侧底板上端的支撑架和通过固定轴活动设置于支撑架侧壁间的转盘,转盘靠近安装座一侧的外壁上固定连接有限位凸起,转盘一侧的固定轴贯穿支撑架侧壁延伸至其另一侧,固定轴末端固定连接有伸缩连杆,伸缩连杆的末端活动连接于活塞杆一端顶部,活塞杆另一端活动套接于调节气筒内,两组活塞杆对称分布于调节气筒两端的端口内,活塞杆末端底部固定连接有辅助件,辅助件和调节气筒端口侧壁间的活塞杆外壁上缠绕设置有复位弹簧,调节气筒中部处侧壁上固定连接有导气管,导气管末端与防护筒侧壁上的气嘴相连接。
8.进一步地,辅助件包括固定连接于活塞杆末端底部的隔离管和设置于隔离管侧壁间的分隔板,分隔板上端中部处贯穿设置有弹簧杆,弹簧杆下端固定连接有磁性定位齿盘,防护筒底板上端对应磁性定位齿盘底部斜齿处均设置有卡槽,隔离管与活塞杆末端内部的空腔相连通,弹簧杆顶端固定连接有球面端头,球面端头延伸至空腔内,且空腔对应端口内壁上固定连接有弹性带,弹性带的末端固定连接有斜面磁块,斜面磁块活动卡合于空腔内。
9.进一步地,限位凸起末端压合贴附于安装座两侧底部边沿上端时,活塞杆末端贴合防护筒两侧内壁,且复位弹簧保持拉伸状态,此时,斜面磁块吸附防护筒内壁移动至空腔端口相邻处,斜面磁块挤压球面端头推动磁性定位齿盘延伸至隔离管底部端口外侧,磁性定位齿盘底部斜齿插接于防护筒底板上端的卡槽内,卡槽体积大于磁性定位齿盘底部斜齿的体积。
10.进一步地,防护筒顶部两侧分别活动设置有弧形卡板,弧形卡板通过底部卡槽活动卡合于防护筒两侧顶部的滑杆外壁上,弧形卡板聚合对接后其中部的弧形缺口贴合于安装座柱体的外壁上,且弧形卡板顶部两侧分别固定连接有固定板,两块弧形卡板顶部的固定板分别相对应,相对应的固定板侧壁间贯穿设置有调节螺杆。
11.进一步地,安装座一侧的弧形卡板端头侧壁两端分别开设有套孔,套孔顶端开设有限位槽,套孔远离端口的一侧内壁上定位槽,定位槽与限位槽相连通,且安装座另一侧的弧形卡板端头侧壁两端分别固定连接有导向柱,导向柱的一侧外壁上固定连接有限位块,限位块与限位槽以及定位槽相匹配,弧形卡板顶部吸附固定有调节磁块。
12.进一步地,夹持组件包括固定连接于气动滑块底部的u型壳套和活动卡合于u型壳套内的调节轮盘,调节轮盘的下端通过u型壳套底板上的通口延伸至其外部,且调节轮盘的两侧外壁上开设有心形导向槽,心形导向槽顶部的调节轮盘外壁上固定连接有把手杆,心形导向槽内活动卡合u型吊架顶部侧壁上的定位柱,u型吊架底板上端固定连接有弹性部件,弹性部件上端固定连接有弧形托板,弧形托板贴合于调节轮盘底部,且u型吊架底部活动连接有移动块,移动块贯穿连接吊板设置。
13.进一步地,u型吊架两侧的u型壳套外壁上分别活动连接有主调节杆,主调节杆末端活动连接于移动销的端头侧壁上,移动销活动卡合于连接吊板顶部的定位座通槽内,定位座通过l型吊杆与u型壳套固定相连,主调节杆的侧壁上活动连接有副调节杆,副调节杆的末端活动连接于u型壳套的侧壁上,且移动销末端相对的连接吊板顶部固定连接有限位卡座,连接吊板底部固定连接有夹臂。
14.进一步地,u型吊架顶端位于心形导向槽顶部的凹槽内时,弹性部件保持压缩状态,此时,移动销的末端插接于限位卡座通口内,移动销插接限位卡座锁定连接吊板。
15.进一步地,夹臂包括固定连接于连接吊板底部两侧的固定架和活动设置于固定架
侧壁间的v型连杆,v型连杆底部末端固定连接有固定夹板,v型连杆顶部相对的连接吊板底部固定连接有液压吊杆,液压吊杆的下端活动套接于v型连杆顶部限位孔内限位杆的外壁上,且限位孔相邻处的v型连杆外壁上固定连接有顶压杆,固定架侧壁间对应顶压杆处设置有压力传感器,固定架外壁上设置有显示屏,显示屏与压力传感器电连接,v型连杆顶部侧壁间设置有辅助夹件。
16.进一步地,辅助夹件包括固定连接于v型连杆顶部端头外壁上的连接条,连接条的侧壁间活动连接有移动杆,移动杆的末端活动套接于连接筒两端的端口内,移动杆间通过弹簧相连,且移动杆末端底部固定连接有固定条,固定条的底部固定连接由辅助副夹板。
17.与现有技术相比,本发明的有益效果如下:
18.1.本发明提出的具有机械臂快速装拆功能的工业机器人,使用充气设备利用气嘴和导气管对调节气筒充气,气体推动调节气筒两端的活塞杆向端口外移动,活塞杆端头移动抵靠防护筒内壁,活塞杆移动时带动伸缩连杆伸长并偏转,伸缩连杆利用固定轴带动转盘偏转,转盘驱使限位凸起向下偏转,限位凸起末端压合安装座两侧底部边沿,设备启动时安装座底部电磁铁通电吸附安装槽底板配合限位凸起的压合对机械臂进行固定,设备关闭后电磁铁断电失去磁力吸附,利用气针顶压气嘴对调节气筒进行放气,放气后复位弹簧带动活塞杆回缩复位,驱使转盘带动限位凸起向上偏转解除对安装座底部边沿的压合,直接从安装槽内将安装座连带整个机械臂直接取下进行更换,方便快捷。
19.2.本发明提出的具有机械臂快速装拆功能的工业机器人,利用把手杆带动调节轮盘在u型壳套内进行旋转,使得u型吊架顶部侧壁上的定位柱脱离心形导向槽顶部凹槽,u型吊架在重力和弹性部件的推动下沿心形导向槽向下滑动,u型吊架顶部侧壁上的定位柱滑落心形导向槽底部凹槽时带动调节轮盘复位,u型吊架推动移动块向连接吊板底部移动,u型吊架下移时利用副调节杆带动主调节杆进行偏转移动,主调节杆偏转后拉动定位座通槽内的移动销向u型吊架移动,使得移动销末端抽离连接吊板末端顶部的限位卡座内腔,即可将连接吊板底部的夹臂部分拆下进行更换,反向操作再次进行安装,以便对机械臂夹臂部分进行快速拆装,无需对机械臂整体进行拆卸,使用方便。
20.3.本发明提出的具有机械臂快速装拆功能的工业机器人,液压吊杆回缩带动v型连杆进行偏转,使得v型连杆末端的固定夹板相互靠近夹持物品,v型连杆偏转时带动顶压杆定压固定架侧壁间的压力传感器检测夹持压力,并利用固定架外壁上的显示屏进行显示,可根据压力显示调节v型连杆偏转角度对适应相应夹持力的物品进行夹持,保证固定夹板对物品有充足的夹持力进行夹持防滑脱,并避免夹持力过大损坏物品,且v型连杆偏转时拉动连接筒端口内的移动杆移动,拉伸移动杆间的弹簧调节辅助副夹板的间距,在固定夹板相互靠近夹持物品时同时利用辅助副夹板对物品上部进行夹持,进一步保证夹持物品的温定,安全可靠。
附图说明
21.图1为本发明具有机械臂快速装拆功能的工业机器人的整体结构示意图;
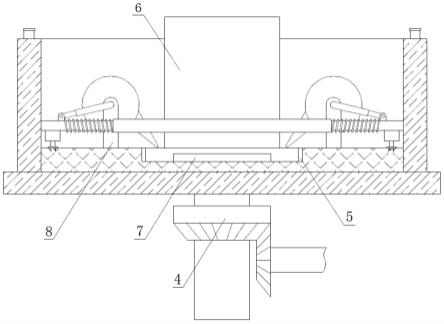
22.图2为本发明具有机械臂快速装拆功能的工业机器人的定位件安装结构示意图;
23.图3为本发明具有机械臂快速装拆功能的工业机器人的定位件结构示意图;
24.图4为本发明具有机械臂快速装拆功能的工业机器人的辅助件结构示意图;
25.图5为本发明具有机械臂快速装拆功能的工业机器人的弧形卡板安装结构示意图;
26.图6为本发明具有机械臂快速装拆功能的工业机器人的弧形卡板内套孔结构示意图;
27.图7为本发明具有机械臂快速装拆功能的工业机器人的夹持组件结构示意图;
28.图8为本发明具有机械臂快速装拆功能的工业机器人的图7中a处放大结构示意图;
29.图9为本发明具有机械臂快速装拆功能的工业机器人的夹臂结构示意图;
30.图10为本发明具有机械臂快速装拆功能的工业机器人的辅助夹件结构示意图。
31.图中:1、支撑板;2、支撑筒;3、防护筒;4、斜齿轮组;5、安装槽;6、安装座;7、电磁铁;8、定位件;81、支撑架;82、固定轴;83、转盘;84、限位凸起;85、伸缩连杆;86、活塞杆;861、空腔;862、弹性带;863、斜面磁块;87、调节气筒;88、辅助件;881、隔离管;882、分隔板;883、弹簧杆;884、磁性定位齿盘;885、球面端头;89、复位弹簧;810、导气管;9、升降座;10、气动直线滑轨;11、气动滑块;12、夹持组件;121、u型壳套;122、调节轮盘;123、心形导向槽;124、把手杆;125、u型吊架;126、弹性部件;127、弧形托板;128、移动块;129、主调节杆;1210、移动销;1211、连接吊板;1212、定位座;1213、副调节杆;1214、限位卡座;1215、夹臂;12151、固定架;12152、v型连杆;12153、固定夹板;12154、液压吊杆;12155、限位孔;12156、顶压杆;12157、压力传感器;12158、显示屏;12159、辅助夹件;121591、连接条;121592、移动杆;121593、连接筒;121594、固定条;121595、辅助副夹板;13、气嘴;14、弧形卡板;141、套孔;142、限位槽;143、定位槽;144、导向柱;145、限位块;15、固定板;16、调节螺杆;17、调节磁块。
具体实施方式
32.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
33.为了解决现有的工业机器人机械臂体积重量大,为了确保机械臂各金属零部件间连接紧密,一般采用繁琐的锁死构件对其金属零部件进行连接固定,在机械臂出现损坏问题时,对于机械臂零部件的拆装就较为麻烦,增加工人劳动强度的问题,请参阅图1-图3,提供以下优选技术方案:
34.具有机械臂快速装拆功能的工业机器人,包括支撑板1和固定连接于支撑板1上端的支撑筒2,支撑筒2顶部活动设置有防护筒3,防护筒3底部固定连接有斜齿轮组4,斜齿轮组4与支撑筒2外壁上的电机输出端相连接,防护筒3底板上端开设有安装槽5,安装槽5内活动卡合有安装座6,安装座6底部嵌合安装有电磁铁7,电磁铁7与设备共用电源,安装座6两侧的防护筒3底板上端固定安装有定位件8,定位件8压合安装座6两侧底部边沿,安装座6顶端延伸至防护筒3顶部端口上方,安装座6顶部固定连接有升降座9,升降座9顶端固定连接有气动直线滑轨10,气动直线滑轨10内的通槽内活动卡合有气动滑块11,气动滑块11底部固定连接有夹持组件12。
35.定位件8包括固定连接于防护筒3两侧底板上端的支撑架81和通过固定轴82活动设置于支撑架81侧壁间的转盘83,转盘83靠近安装座6一侧的外壁上固定连接有限位凸起84,转盘83一侧的固定轴82贯穿支撑架81侧壁延伸至其另一侧,固定轴82末端固定连接有伸缩连杆85,伸缩连杆85的末端活动连接于活塞杆86一端顶部,活塞杆86另一端活动套接于调节气筒87内,两组活塞杆86对称分布于调节气筒87两端的端口内,活塞杆86末端底部固定连接有辅助件88,辅助件88和调节气筒87端口侧壁间的活塞杆86外壁上缠绕设置有复位弹簧89,调节气筒87中部处侧壁上固定连接有导气管810,导气管810末端与防护筒3侧壁上的气嘴13相连接。
36.具体的,使用充气设备利用气嘴13和导气管810对调节气筒87充气,气体推动调节气筒87两端的活塞杆86向端口外移动,活塞杆86端头移动抵靠防护筒3内壁,活塞杆86移动时带动伸缩连杆85伸长并偏转,伸缩连杆85利用固定轴82带动转盘83偏转,转盘83驱使限位凸起84向下偏转,限位凸起84末端压合安装座6两侧底部边沿,设备启动时安装座6底部电磁铁7通电吸附安装槽5底板配合限位凸起84的压合对机械臂进行固定,设备关闭后电磁铁7断电失去磁力吸附,利用气针顶压气嘴13对调节气筒87进行放气,放气后复位弹簧89带动活塞杆86回缩复位,驱使转盘83带动限位凸起84向上偏转解除对安装座6底部边沿的压合,直接从安装槽5内将安装座6连带整个机械臂直接取下进行更换,方便快捷。
37.为了保证安装座6的安装稳定,如图3-图6所示,提供以下优选技术方案:
38.辅助件88包括固定连接于活塞杆86末端底部的隔离管881和设置于隔离管881侧壁间的分隔板882,分隔板882上端中部处贯穿设置有弹簧杆883,弹簧杆883下端固定连接有磁性定位齿盘884,防护筒3底板上端对应磁性定位齿盘884底部斜齿处均设置有卡槽,隔离管881与活塞杆86末端内部的空腔861相连通,弹簧杆883顶端固定连接有球面端头885,球面端头885延伸至空腔861内,且空腔861对应端口内壁上固定连接有弹性带862,弹性带862的末端固定连接有斜面磁块863,斜面磁块863活动卡合于空腔861内。
39.限位凸起84末端压合贴附于安装座6两侧底部边沿上端时,活塞杆86末端贴合防护筒3两侧内壁,且复位弹簧89保持拉伸状态,此时,斜面磁块863吸附防护筒3内壁移动至空腔861端口相邻处,斜面磁块863挤压球面端头885推动磁性定位齿盘884延伸至隔离管881底部端口外侧,磁性定位齿盘884底部斜齿插接于防护筒3底板上端的卡槽内,卡槽体积大于磁性定位齿盘884底部斜齿的体积。
40.防护筒3顶部两侧分别活动设置有弧形卡板14,弧形卡板14通过底部卡槽活动卡合于防护筒3两侧顶部的滑杆外壁上,弧形卡板14聚合对接后其中部的弧形缺口贴合于安装座6柱体的外壁上,且弧形卡板14顶部两侧分别固定连接有固定板15,两块弧形卡板14顶部的固定板15分别相对应,相对应的固定板15侧壁间贯穿设置有调节螺杆16。
41.安装座6一侧的弧形卡板14端头侧壁两端分别开设有套孔141,套孔141顶端开设有限位槽142,套孔141远离端口的一侧内壁上定位槽143,定位槽143与限位槽142相连通,且安装座6另一侧的弧形卡板14端头侧壁两端分别固定连接有导向柱144,导向柱144的一侧外壁上固定连接有限位块145,限位块145与限位槽142以及定位槽143相匹配,弧形卡板14顶部吸附固定有调节磁块17。
42.具体的,调节气筒87充气推动活塞杆86抵靠防护筒3内壁后,空腔861内斜面磁块863受防护筒3内壁吸引移动至空腔861端口相邻处,斜面磁块863斜面挤压球面端头885推
动磁性定位齿盘884延伸至隔离管881底部端口外侧,磁性定位齿盘884底部斜齿插接于防护筒3底板上端的卡槽内,利用磁性定位齿盘884底部斜齿插入防护筒3底板上端的卡槽对活塞杆86进行纵向吸附固定,加强对活塞杆86的纵向固定,并通过弧形卡板14聚合对接后卡箍安装座6柱体,加强安装座6及整体机械臂的安装稳定性,活塞杆86滑动了卡槽的让渡间距后,弹性带862带动斜面磁块863移动远离防护筒3内壁失去吸引,弹性带862带动斜面磁块863复位,弹簧杆883带动磁性定位齿盘884抽离卡槽进行复位,活塞杆86可进行横向移动。
43.为了实现对机械臂夹持组件的快速装拆,如图1、图7和图8所示,提供以下优选技术方案:
44.夹持组件12包括固定连接于气动滑块11底部的u型壳套121和活动卡合于u型壳套121内的调节轮盘122,调节轮盘122的下端通过u型壳套121底板上的通口延伸至其外部,且调节轮盘122的两侧外壁上开设有心形导向槽123,心形导向槽123顶部的调节轮盘122外壁上固定连接有把手杆124,心形导向槽123内活动卡合u型吊架125顶部侧壁上的定位柱,u型吊架125底板上端固定连接有弹性部件126,弹性部件126上端固定连接有弧形托板127,弧形托板127贴合于调节轮盘122底部,且u型吊架125底部活动连接有移动块128,移动块128贯穿连接吊板1211设置。
45.u型吊架125两侧的u型壳套121外壁上分别活动连接有主调节杆129,主调节杆129末端活动连接于移动销1210的端头侧壁上,移动销1210活动卡合于连接吊板1211顶部的定位座1212通槽内,定位座1212通过l型吊杆与u型壳套121固定相连,主调节杆129的侧壁上活动连接有副调节杆1213,副调节杆1213的末端活动连接于u型壳套121的侧壁上,且移动销1210末端相对的连接吊板1211顶部固定连接有限位卡座1214,连接吊板1211底部固定连接有夹臂1215。
46.u型吊架125顶端位于心形导向槽123顶部的凹槽内时,弹性部件126保持压缩状态,此时,移动销1210的末端插接于限位卡座1214通口内,移动销1210插接限位卡座1214锁定连接吊板1211。
47.具体的,利用把手杆124带动调节轮盘122在u型壳套121内进行旋转,使得u型吊架125顶部侧壁上的定位柱脱离心形导向槽123顶部凹槽,u型吊架125在重力和弹性部件126的推动下沿心形导向槽123向下滑动,u型吊架125顶部侧壁上的定位柱滑落心形导向槽123底部凹槽时带动调节轮盘122复位,u型吊架125推动移动块128向连接吊板1211底部移动,u型吊架125下移时利用副调节杆1213带动主调节杆129进行偏转移动,主调节杆129偏转后拉动定位座1212通槽内的移动销1210向u型吊架125移动,使得移动销1210末端抽离连接吊板1211末端顶部的限位卡座1214内腔,即可将连接吊板1211底部的夹臂1215部分拆下进行更换,反向操作再次进行安装,以便对机械臂夹臂1215部分进行快速拆装,无需对机械臂整体进行拆卸。
48.为了解决现有的工业机器人机械臂对物品进行夹持搬运时,夹臂1215和物品间存在滑脱的现象,物品滑脱掉落摔损造成不必要的经济损失的问题,提供以下优选技术方案:
49.夹臂1215包括固定连接于连接吊板1211底部两侧的固定架12151和活动设置于固定架12151侧壁间的v型连杆12152,v型连杆12152底部末端固定连接有固定夹板12153,v型连杆12152顶部相对的连接吊板1211底部固定连接有液压吊杆12154,液压吊杆12154的下
端活动套接于v型连杆12152顶部限位孔12155内限位杆的外壁上,且限位孔12155相邻处的v型连杆12152外壁上固定连接有顶压杆12156,固定架12151侧壁间对应顶压杆12156处设置有压力传感器12157,固定架12151外壁上设置有显示屏12158,显示屏12158与压力传感器12157电连接,v型连杆12152顶部侧壁间设置有辅助夹件12159。
50.辅助夹件12159包括固定连接于v型连杆12152顶部端头外壁上的连接条121591,连接条121591的侧壁间活动连接有移动杆121592,移动杆121592的末端活动套接于连接筒121593两端的端口内,移动杆121592间通过弹簧相连,且移动杆121592末端底部固定连接有固定条121594,固定条121594的底部固定连接由辅助副夹板121595。
51.具体的,液压吊杆12154回缩带动v型连杆12152进行偏转,使得v型连杆12152末端的固定夹板12153相互靠近夹持物品,v型连杆12152偏转时带动顶压杆12156定压固定架12151侧壁间的压力传感器12157检测夹持压力,并利用固定架12151外壁上的显示屏12158进行显示,可根据压力显示调节v型连杆12152偏转角度对适应相应夹持力的物品进行夹持,保证固定夹板12153对物品有充足的夹持力进行夹持防滑脱,并避免夹持力过大损坏物品,且v型连杆12152偏转时拉动连接筒121593端口内的移动杆121592移动,拉伸移动杆121592间的弹簧调节辅助副夹板121595的间距,在固定夹板12153相互靠近夹持物品时同时利用辅助副夹板121595对物品上部进行二次夹持,进一步保证夹持物品的温定,安全可靠。
52.需要说明的是,在本文中,诸如第一和第二等之类的关系术语仅仅用来将一个实体或者操作与另一个实体或操作区分开来,而不一定要求或者暗示这些实体或操作之间存在任何这种实际的关系或者顺序。而且,术语“包括”、“包含”或者其任何其他变体意在涵盖非排他性的包含,从而使得包括一系列要素的过程、方法、物品或者设备不仅包括那些要素,而且还包括没有明确列出的其他要素,或者是还包括为这种过程、方法、物品或者设备所固有的要素。
53.尽管已经示出和描述了本发明的实施例,对于本领域的普通技术人员而言,可以理解在不脱离本发明的原理和精神的情况下可以对这些实施例进行多种变化、修改、替换和变型,本发明的范围由所附权利要求及其等同物限定。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。