1.本发明涉及三维测量技术领域,尤其涉及一种基于像素编码的光学三维测量方法及系统。
背景技术:
2.近年来,光学三维测量技术已趋于成熟并在人体建模、模式识别、工业检测、逆向工程等领域得到广泛应用,但是随着工业智能化的发展及应用领域的拓展,人们对三维测量的速度和精度提出了更严格的要求。然而,目前主流的高速三维测量方法及系统需要价格昂贵的高速相机作为探测器,存在硬件成本高、测量精度低等问题,无法胜任于智能制造中动态场景的测量任务。
3.因此,现有技术还有待改进和提高。
技术实现要素:
4.本发明要解决的技术问题在于,针对现有技术的上述缺陷,提供一种基于像素编码的光学三维测量方法及系统,旨在解决现有技术中的高速三维测量方法及系统需要价格昂贵的高速相机作为探测器,存在硬件成本高、测量精度低的问题。
5.为了解决上述技术问题,本发明所采用的技术方案如下:
6.第一方面,本发明提供一种基于像素编码的光学三维测量方法,其中,所述方法包括:
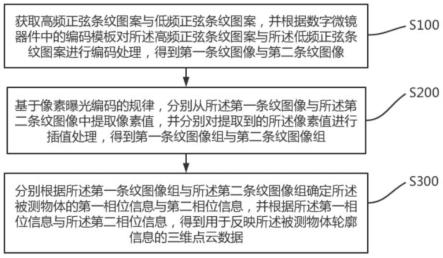
7.获取高频正弦条纹图案组与低频正弦条纹图案组,并根据数字微镜器件中的编码模板对所述高频正弦条纹图案与所述低频正弦条纹图案进行编码处理,得到第一条纹图像与第二条纹图像;
8.基于像素曝光编码的规律,分别从所述第一条纹图像与所述第二条纹图像中提取像素值,并分别对提取到的所述像素值进行插值处理,得到第一条纹图像组与第二条纹图像组;
9.分别根据所述第一条纹图像组与所述第二条纹图像组确定所述被测物体的第一相位信息与第二相位信息,并根据所述第一相位信息与所述第二相位信息,得到用于反映所述被测物体轮廓信息的三维点云数据。
10.在一种实现方式中,所述获取高频正弦条纹图案与低频正弦条纹图案,并根据数字微镜器件中的编码模板对所述高频正弦条纹图案与所述低频正弦条纹图案进行编码处理,得到第一条纹图像与第二条纹图像,包括:
11.获取所述高频正弦条纹图案与所述低频正弦条纹图案,并基于数字投影系统将所述获取高频正弦条纹图案与所述低频正弦条纹图案依序投射至被测物体表面,形成序列的正弦强度分布的条纹强度信息;
12.根据不同的编码模板,将所述条纹强度信息分别进行编码,得到编码条纹信息;
13.将所述编码条纹信息分别记录至第一图像和第二图像上,得到所述第一条纹图像
与第二条纹图像。
14.在一种实现方式中,所述根据不同的编码模板,将所述条纹强度信息分别进行编码,得到编码条纹信息,包括:
15.当所述高频正弦条纹图案与所述低频正弦条纹图案投射至被测物体表面后,所述被测物体表面反射的信号光经过透镜聚焦到数字微镜器件的面板上;
16.所述数字微镜器件根据所述高频正弦条纹图案与所述低频正弦条纹图案的变换进行同步切换,并载入不同的编码模板;
17.将所述条纹强度信息分别进行编码,并经数字微镜器件调制后的信号光经透镜成像到探测器上,得到编码条纹信息。
18.在一种实现方式中,所述根据所述第一相位信息与所述第二相位信息,得到用于反映所述被测物体轮廓信息的三维点云数据,包括:
19.根据所述第一相位信息与所述第二相位信息,计算所述被测物体表面的连续相位,并确定与所述连续相位所对应的相位图像;
20.建立所述相位图像与所述被测物体表面的三维坐标关系;
21.根据所述三维坐标关系,将所述连续相位转化成所述三维点云数据。
22.在一种实现方式中,所述建立所述相位图像与所述被测物体表面的三维坐标关系,包括:
23.获取预设的三阶多项式模型;
24.基于所述三阶多项式模型对建立所述相位图像与所述被测物体表面的三维坐标关系。
25.第二方面,本发明实施例还提供一种基于像素编码的光学三维测量系统,其中,所述系统包括:
26.数字投影系统,所述数字投影系统用于向被测物体表面投射正弦强度分布的条纹结构光;
27.数字微镜器件,所述数字微镜器件用于对所述被测物体表面反射的光信号进行编码,得到编码条纹信息;
28.探测器,所述探测器与所述数字投影系统连接,用于根据所述编码条纹信息,得到第一条纹图像与第二条纹图像;
29.终端设备,所述终端设备与所述数字微镜器件、所述数字投影系统以及所述探测器均连接,用于对所述第一条纹图像与所述第二条纹图像进行处理,得到所述被测物体表面的三维点云数据,以反映出所述被测物体表面的轮廓信息。
30.在一种实现方式中,所述系统还包括信号发生器,所述信号发生器与所述数字投影系统、所述数字微镜器件以及所述终端设备均连接,用于发射触发信号,以使得各个硬件之间的同步。
31.在一种实现方式中,所述系统还包括第一成像透镜,所述第一成像透镜位于所述数字微镜器件与所述被测物体表面之间。
32.在一种实现方式中,所述探测器包括ccd芯片,所述ccd芯片与所述数字微镜器件对应。
33.在一种实现方式中,所述系统还包括第二成像透镜,所述第二成像透镜位于所述
数字微镜器件与所述ccd芯片与之间。
34.有益效果:与现有技术相比,本发明提供了一种基于像素编码的光学三维测量方法,所述方法包括:获取高频正弦条纹图案与低频正弦条纹图案,并根据数字微镜器件中的编码模板对所述高频正弦条纹图案与所述低频正弦条纹图案进行编码处理,得到第一条纹图像与第二条纹图像;基于像素曝光编码的规律,分别从所述第一条纹图像与所述第二条纹图像中提取像素值,并分别对提取到的所述像素值进行插值处理,得到第一条纹图像组与第二条纹图像组;分别根据所述第一条纹图像组与所述第二条纹图像组确定所述被测物体的第一相位信息与第二相位信息,并根据所述第一相位信息与所述第二相位信息,得到用于反映所述被测物体轮廓信息的三维点云数据。本发明通过像素曝光编码技术能够将三维测量的信息采集效率提升数倍,且通过从条纹图像中提取出来像素值并插值后得到条纹图像组,并通过对该条纹图像组进行计算分析获得物体轮廓的精确三维坐标,实现高速三维测量。
附图说明
35.图1为本发明实施例提供的基于像素编码的光学三维测量方法的具体实施方式的流程图。
36.图2为本发明实施例提供的基于像素编码的光学三维测量方法中编码模板的示意图。
37.图3为本发明实施例提供的基于像素编码的光学三维测量方法中编码处理过程的示意图。
38.图4为本发明实施例提供的基于像素编码的光学三维测量方法中数字微镜器件上每个微反射镜与ccd芯片的每个像素之间的对应关系示意图。
39.图5为本发明实施例提供的基于像素编码的光学三维测量方法中dlp、dmd、ccd之间的同步触发关系示意图。
40.图6为本发明实施例提供的基于像素编码的光学三维测量方法中图像处理原理的示意图。
41.图7为本发明实施例提供的基于像素编码的光学三维测量方法中被测物体三维轮廓获取的处理过程的示意图。
42.图8为本发明实施例提供的基于像素编码的光学三维测量系统的示意图。
具体实施方式
43.为使本发明的目的、技术方案及效果更加清楚、明确,以下参照附图并举实施例对本发明进一步详细说明。应当理解,此处所描述的具体实施例仅用以解释本发明,并不用于限定本发明。
44.本实施例提供一种基于像素编码的光学三维测量方法,通过本实施例的方法可有效提高三维测量的信息采集效率。具体实时时,本实施例首先获取高频正弦条纹图案与低频正弦条纹图案,并根据数字微镜器件中的编码模板对所述高频正弦条纹图案与所述低频正弦条纹图案进行编码处理,得到第一条纹图像与第二条纹图像;基于像素曝光编码的规律,分别从所述第一条纹图像与所述第二条纹图像中提取像素值,并分别对提取到的所述
像素值进行插值处理,得到第一条纹图像组与第二条纹图像组;分别根据所述第一条纹图像组与所述第二条纹图像组确定所述被测物体的第一相位信息与第二相位信息,并根据所述第一相位信息与所述第二相位信息,得到用于反映所述被测物体轮廓信息的三维点云数据。本发明通过像素曝光编码技术能够将三维测量的信息采集效率提升数倍,且通过从条纹图像中提取出来像素值并插值后得到条纹图像组,并通过对该条纹图像组进行计算分析获得物体轮廓的精确三维坐标,实现高速三维测量。
45.示例性方法
46.如图1中所示,本实施例中的基于像素编码的光学三维测量方法包括如下步骤:
47.步骤s100、获取高频正弦条纹图案与低频正弦条纹图案,并根据数字微镜器件中的编码模板对所述高频正弦条纹图案与所述低频正弦条纹图案进行编码处理,得到第一条纹图像与第二条纹图像。
48.在本实施例中,所述光学三维测量方法通过构建的基于像素编码的光学三维测量系统实现的。首先通过数字投影系统(digital light processing,dlp)将周期为λh的高频正弦条纹图案f
h1
,f
h2
,f
h3
,f
h4
,与周期为λ
l
的低频正弦条纹图案f
l1
,f
l2
,f
l3
,f
l4
,依序投射到被测物体表面,形成序列的正弦强度分布的条纹强度信息i
h1
,i
h2
,i
h3
,i
h4
和i
l1
,i
l2
,i
l3
,i
l4
。被测物体表面与一数字微镜器件(digital micromirror devices,dmd)对应,在被测物体表面与数字微镜器件之间设置有第一成像透镜,被测物体表面会将高频正弦条纹图案与低频正弦条纹图案进行反射,反射的信号光经过第一成像透镜聚焦到数字微镜器件的面板上。然后,数字微镜器件根据投影条纹图案的变化规律进行同步变化,并且载入不同的编码模板m∈(0,1),然后根据该编码模板对条纹强度信息分别进行编码处理,得到编码条纹信息i
h1
·
m1,,
…
,i
h4
·
m4和i
l1
·
m1,
…
,i
l4
·
m4,本实施例中的编码模板如图2中所示,图2中标识出了编码模板m1,m2,m3,m4,编码处理的过程如图3所示,从图3中可以看出,本实施例将每一个条纹强度信息i都乘上各自编码模板m。
49.接着,数字微镜器件将编码条纹强度信息进行调制后输出信号光,并经过第二成像透镜成像至探测器上,在本实施例中,所述探测器包括ccd(charge coupled device,一种特殊半导体器件)芯片,在成像时,数字微镜器件上每个微反射镜与ccd芯片的每个像素之间的对应关系如图4中所示。本实施例将所述编码条纹信息i
h1
·
m1,,
…
,i
h4
·
m4和i
l1
·
m1,
…
,i
l4
·
m4分别记录至第一图像和第二图像上,得到所述第一条纹图像ih与第二条纹图像i
l
。其中ih=i
h1
·
m1 i
h2
·
m2 i
h3
·
m3 i
h4
·
m4;i
l
=i
l1
·
m1 i
l2
·
m2 i
l3
·
m3 i
l4
·
m4。本实施例通过在数字微镜器件上载入不同编码模板,对探测器上每个像素的曝光的开始时刻和持续时间进行编码,将多个被测物体的编码条纹强度信息互不干扰的融合进单帧编码图像(即第一图像ih和第二图像i
l
),这样可将将三维测量的信息采集效率提升数倍。
50.在本实施例中,数字投影系统、数字微镜器件以及探测器之间的信号同步是基于信号发生器来触发的,通过信号发生器来发出触发信号,保证所有的硬件都同步,具体如图5所示。
51.步骤s200、基于像素曝光编码的规律,分别从所述第一条纹图像与所述第二条纹图像中提取像素值,并分别对提取到的所述像素值进行插值处理,得到第一条纹图像组与第二条纹图像组。
52.在得到第一条纹图像和第二条纹图像后,本实施例分别从第一条纹图像与所述第
二条纹图像中提取像素值,具体如图6中所示,通过对第一图条纹图像与第二条纹图像进行提取像素值并插值后,就可获得两组条纹图像,即第一条纹图像组i'
h1
,i'
h2
,i'
h3
,i'
h4
和第二条纹图像组i'
l1
,i'
l2
,i'
l3
,i'
l4
。
53.步骤s300、分别根据所述第一条纹图像组与所述第二条纹图像组确定所述被测物体的第一相位信息与第二相位信息,并根据所述第一相位信息与所述第二相位信息,得到用于反映所述被测物体轮廓信息的三维点云数据。
54.具体实施时,当得到第一条纹图像组和第二条纹图像组后,本实施例的终端设备根据公式其中n=4,n为相移指数,n=0,1,2,3。可以从两组条纹图像中计算出包含被测物体三维轮廓信息的第一相位信息φh和第二相位信息φ
l
。然后,本实施例根据所述第一相位信息与所述第二相位信息,计算所述被测物体表面的连续相位,并确定与所述连续相位所对应的相位图像;建立所述相位图像与所述被测物体表面的三维坐标关系;最后根据所述三维坐标关系,将所述连续相位转化成所述三维点云数据。
55.具体地,结合图7所示,本实施例的终端设备根据双频条纹相位展开算法,通φh和φ
l
计算出被测物体表面的连续相位φ,其中计算出被测物体表面的连续相位φ,其中计算出被测物体表面的连续相位φ,其中φ
eq
(x,y)=φh(x,y)-φ
l
(x,y)。然后系统的标定参数并基于三阶多项式模型来建立相位图像与被测物体三维坐标的关系,其中,三阶多项式模型为(x,y,z)=f(u,v,φ,c),式中,u,v为相位图像坐标,φ为相位值,c为多项式系数,具体如下:
56.x=c
x1
u
·cx2
v
·cx3
φ
·cx4
u2·cx5
v2·cx6
φ2·cx7
u
·v·cx8
u
·
φ
·cx9
v
·
φ
·cx10
u3·cx11
v3·cx12
φ3·cx13
u2·v·cx14
u2·
φ
·cx15
u
·
v2·cx16
v2·
φ
·cx17
u
·
φ2·cx18
u
·
φ2·cx19
u
·v·
φ
·cx20
;
57.y=c
y1
u
·cy2
v
·cy3
φ
·cy4
u2·cy5
v2·cy6
φ2·cy7
u
·v·cy8
u
·
φ
·cy9
v
·
φ
·cy10
u3·cy11
v3·cy12
φ3·cy13
u2·v·cy14
u2·
φ
·cy15
u
·
v2·cy16
v2·
φ
·cy17
u
·
φ2·cy18
u
·
φ2·cy19
u
·v·
φ
·cy20
;
58.z=c1 u
·cz2
v
·cz3
φ
·cz4
u2·cz5
v2·cz6
φ2·cz7
u
·v·cz8
u
·
φ
·cz9
v
·
φ
·cz10
u3·cz11
v3·cz12
φ3·cz13
u2·v·cz14
u2·
φ
·cz15
u
·
v2·cz16
v2·
φ
·cz17
u
·
φ2·cz18
u
·
φ2·c19
u
·v·
φ
·cz20
;
59.最后根据所述三维坐标关系,将所述连续相位转化成所述三维点云数据,这样就得到被测物体的三维坐标,从而实现对被测物体的轮廓信息的测量。
60.综上,本实施例首先获取高频正弦条纹图案与低频正弦条纹图案,并根据数字微镜器件中的编码模板对所述高频正弦条纹图案与所述低频正弦条纹图案进行编码处理,得到第一条纹图像与第二条纹图像;基于像素曝光编码的规律,分别从所述第一条纹图像与所述第二条纹图像中提取像素值,并分别对提取到的所述像素值进行插值处理,得到第一条纹图像组与第二条纹图像组;分别根据所述第一条纹图像组与所述第二条纹图像组确定所述被测物体的第一相位信息与第二相位信息,并根据所述第一相位信息与所述第二相位
信息,得到用于反映所述被测物体轮廓信息的三维点云数据。本实施例通过像素曝光编码技术能够将三维测量的信息采集效率提升数倍,且通过从条纹图像中提取出来像素值并插值后得到条纹图像组,并通过对该条纹图像组进行计算分析获得物体轮廓的精确三维坐标,实现高速三维测量。
61.示例性装置
62.基于上述实施例,本发明实施例还提供一种基于像素编码的光学三维测量系统,如图8中所示,在本实施例中,所述基于像素编码的光学三维测量系统是由实现上述方法实施例的硬件组成的。本实施例的基于像素编码的光学三维测量系统包括:数字投影仪1,被测物体2,第一成像透镜3,数字微镜器件4,第二成像透镜5,探测器6,信号发生器7,终端设备8。其中,所述数字投影系统1用于向被测物体2表面投射正弦强度分布的条纹结构光;所述数字微镜器件4用于对所述被测物体2表面反射的光信号进行编码,得到编码条纹信息;所述探测器6与所述数字投影系统1连接,用于根据所述编码条纹信息,得到第一条纹图像与第二条纹图像;所述终端设备7与所述数字微镜器件4、所述数字投影系统1以及所述探测器6均连接,用于对所述第一条纹图像与所述第二条纹图像进行处理,得到所述被测物体2表面的三维点云数据,以反映出所述被测物体2表面的轮廓信息。所述信号发生器7与所述数字投影系统1、所述数字微镜器件4以及所述终端设备8均连接,用于发射触发信号,以使得各个硬件之间的同步。本实施例中,所述第一成像透镜3位于所述数字微镜器件4与所述被测物体2表面之间。所述探测器6包括ccd芯片,所述ccd芯片与所述数字微镜器件4对应。所述第二成像透镜5位于所述数字微镜器件4与所述ccd芯片与之间。
63.本实施例中的各个硬件的工作原理与上述方法实施例中的工作原理相同,此处不在赘述。
64.综上,本发明公开了一种基于像素编码的光学三维测量方法及系统,方法包括:获取高频正弦条纹图案与低频正弦条纹图案,并根据数字微镜器件中的编码模板对高频正弦条纹图案与低频正弦条纹图案进行编码处理,得到第一条纹图像与第二条纹图像;基于像素曝光编码的规律,分别从第一条纹图像与第二条纹图像中提取像素值,并对提取到的像素值进行插值处理,得到第一条纹图像组与第二条纹图像组;根据第一条纹图像组与第二条纹图像组确定被测物体的第一相位信息与第二相位信息,并根据第一相位信息与第二相位信息,得到用于反映被测物体轮廓信息的三维点云数据。本发明可有效提高三维测量的信息采集效率,实现高速三维测量。
65.最后应说明的是:以上实施例仅用以说明本发明的技术方案,而非对其限制;尽管参照前述实施例对本发明进行了详细的说明,本领域的普通技术人员应当理解:其依然可以对前述各实施例所记载的技术方案进行修改,或者对其中部分技术特征进行等同替换;而这些修改或者替换,并不使相应技术方案的本质脱离本发明各实施例技术方案的精神和范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。