1.本发明属于微细作业装备技术领域,涉及一种柔性并联指向机构,具体涉及一种新型微弧度级指向精度的精密柔性并联指向机构。
背景技术:
2.随着精密工程的快速发展,指向机构广泛应用于激光通信、天线指向、天文望远镜、红外跟踪和瞄准系统中,且对少自由度、高精密的指向机构的需求越来越大。
3.由于并联机构具有精度高、刚度高、承载能力大、动态特性好等优势,广泛应用于超精密机构中。柔性铰链通过材料的弹性变形实现高精度的运动,具有无间隙、无摩擦、无需润滑的特性,被用来代替传统的刚性运动副。采用叠堆压电陶瓷驱动器可以保证系统高的分辨率、精度和稳定性。
技术实现要素:
4.本发明的目的在于提供一种具有一定的承载能力,结构简单紧凑、制造成本低、精度高等性能优点的用于精密指向的新型精密柔性并联指向机构。
5.本发明所采用的技术方案是:一种新型精密柔性并联指向机构,包括静平台、压电陶瓷驱动器、第一柔性铰链、连杆、第二柔性铰链、动平台;
6.所述连杆与连杆之间通过所述第二柔性铰链连接,所述连杆通过所述第一柔性铰链与所述静平台连接,所述连杆通过所述第一柔性铰链与所述动平台(7)连接;
7.第一柔性铰链、若干连杆、若干第二柔性铰链、第一柔性铰链组成一支链,所述静平台与动平台之间设置有若干支链;
8.所述压电陶瓷驱动器设置有若干,一端设置在所述静平台上,另一端与临近的连杆连接,使连杆做绕柔性铰链中心的微转动。
9.作为优选,所述静平台上设置有若干第一螺纹孔和若干第二螺纹孔;所述压电陶瓷驱动器通过所述第一螺纹孔固定安装在所述静平台上;所述第一柔性铰链通过所述第二螺纹孔固定安装在所述静平台上。这样设计一体成型,减小机构的装配误差,保证机构的指向精度。
10.作为优选,所述静平台由下台体和上台体组成,下台体和上台体呈凸型连接在一起;所述第一螺纹孔设置在下台体上,所述第二螺纹孔设置在上台体上。
11.作为优选,所述第一柔性铰链由2个矩形状刚性块通过1个圆弧状柔性单元连接而成;其中柔性单元在机构运动时发生较大变形,在机构中充当转动副;2个矩形刚性块在机构运动过程中只发生微小变形,其变形可忽略不计,起着连接其他构件的作用;其中一个矩形状刚性块设置有螺纹孔,通过螺纹连接的方式直接与动平台或静平台相连;另一个矩形刚性块与连杆或连杆连接。第一柔性铰链一体成型,减小机构的装配误差,确保铰链的变形发生在铰链圆弧处,保证机构的指向精度。
12.作为优选,所述第二柔性铰链由2个矩形状刚性块和1个梯形状刚性块通过2个圆
弧状柔性单元串联连接而成。2个圆弧状柔性单元的功能方向(转动方向)轴线的夹角为60
°
。其中柔性单元在机构运动时发生较大变形,在机构中充当转动副,即第二柔性铰链中包含2个柔性转动副。3个刚性块在机构运动过程中只发生微小变形(变形可忽略不计),2个矩形状刚性块通过胶接、焊接、螺纹连接等方式分别与连杆4和连杆6连接。这样设计结构简单,可一体化加工;可保证功能方向(转动方向)具有较好的柔度,而其他非功能方向具有较大的刚度,从而保证转动精度。
13.作为优选,所述第一柔性铰链和第二柔性铰链为直圆形柔性铰链,铰链的切口处为两个半圆弧。这样设计结构简单,可一体化加工。可保证功能方向(转动方向)具有较好的柔度,而其他非功能方向具有较大的刚度,从而保证转动精度半圆弧切口的设计可减小材料变形引起的应力集中问题。
14.本发明提供的一种新型精密柔性并联指向机构,采用柔性铰链作为被动关节,结合了柔性机构和并联机构的优点,使得基于柔性铰链的并联指向机构具有结构紧凑、刚度大、承载能力强、精度高、易于装配等一系列优点,并且解决了传统的并联机构由于摩擦、磨损、以及装配误差等原因所导致的精度较低的问题,使结构更加紧凑,降低制造成本的同时还具有高精度,高分辨率的特性,适用于许多特定环境下的微操作,在工程实践中具有重要意义。
附图说明
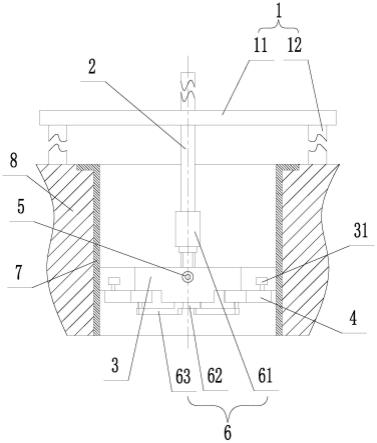
15.图1为本发明实施例的整体结构示意图。
16.图2为本发明实施例的单条支链示意图。
17.图3为本发明实施例的静平台示意图。
18.图4为本发明实施例的动平台示意图,(a)为俯视图,(b)为仰视图。
19.图5为本发明实施例的第一柔性铰链的结构示意图。
20.图6为本发明实施例的第二柔性铰链的结构示意图。
21.图7为本发明实施例的柔性铰链的结构示意图。
22.其中,1、静平台;2、压电陶瓷驱动器;3、第一柔性铰链;4、连杆;5、第二柔性铰链;6、连杆;7、动平台。
具体实施方式
23.为了便于本领域普通技术人员理解和实施本发明,下面结合附图及实施例对本发明作进一步的详细描述,应当理解,此处所描述的实施示例仅用于说明和解释本发明,并不用于限定本发明。
24.请见图1-图7,本发明提供的一种新型精密柔性并联指向机构,包括静平台1、压电陶瓷驱动器2、第一柔性铰链3、连杆4、第二柔性铰链5、连杆6、动平台7;静平台3上设置有第一螺纹孔3-1和第二螺纹孔3-2;压电陶瓷驱动器2共有2组,通过第一螺纹孔3-1安装在静平台1上。第一柔性铰链3共8个,其中四个通过第二螺纹孔3-2安装在静平台上,其余4个通过螺纹孔安装在动平台7。
25.连杆4和连杆6共8根,与第一柔性铰链3和第二柔性铰链5连接,共同组成4条支链。每条支链的连接方式为:静平台1-第一柔性铰链3-连杆4-第二柔性铰链5-连杆6-第一柔性
铰链3-动平台7,两两之间均通过螺纹连接。
26.本实施例共有4条支链,每条支链串联4个柔性铰链,共计16个柔性铰链。两个压电陶瓷驱动器分别作用于相邻两条支链靠近静平台的连杆。本实施例由两组压电陶瓷驱动器2驱动,压电陶瓷驱动器2推动连杆4做绕第一柔性铰链3中柔性铰链中心的微转动。连杆、柔性铰链、静平台运动间相互耦合,实现了动平台7的精密指向。
27.请见图5,本实施例的第一柔性铰链,由2个矩形状刚性块通过1个圆弧状柔性单元连接而成。其中柔性单元在机构运动时发生较大变形,在机构中充当转动副。2个矩形刚性块在机构运动过程中只发生微小变形(变形可忽略不计),起着连接其他构件的作用。其中一个矩形状刚性块设置有螺纹孔,通过螺纹连接的方式直接与动(或静)平台相连。另一个矩形刚性块,可通过胶接、焊接、螺纹连接等方式使其与连杆4(或连杆6)固连。
28.为了使柔性铰链的变形集中在铰链的圆弧部分,减小圆弧处刚度,增大圆弧部位以外的刚度,第一柔性铰链中圆弧以外部分,作用为,
①
保证有足够大的刚度,
②
保证第一柔性铰链中圆弧部分在机构中的相对位置,
③
便于加工与安装。
29.请见图6,本实施例的第二柔性铰链由2个矩形状刚性块和1个梯形状刚性块通过2个圆弧状柔性单元串联连接而成。2个圆弧状柔性单元的功能方向(转动方向)轴线的夹角为60
°
。柔性单元在机构运动时发生较大变形,在机构中充当转动副,即第二柔性铰链中包含2个柔性转动副。3个刚性块在机构运动过程中只发生微小变形(变形可忽略不计),2个矩形状刚性块通过胶接、焊接、螺纹连接等方式分别与连杆4和连杆6连接。
30.本实施例的柔性铰链结构示意图见图7,柔性铰链为直圆形柔性铰链,铰链的切口处为两个半圆弧。可以根据机构整体柔度性能要求,选用合适大小的圆弧,合适的材料。
31.假设精密柔性并联指向机构的支链数为n,根据螺旋理论可求得机构的阶λ为5。机构由支链和动、静平台组成,且每条支链包含3根连杆,因此包括机架在内的所有构件数目n等于3n 2。每条支链包含4个转动副,所以机构总运动副数目g等于4n。又每个转动副具有1个自由度,故机构所有运动副总的自由度数目为4n。当机构的支链数n为3时,机构不存在过约束;当支链数超过3时,每增加一条支链,机构增加一个过约束。因此,机构中全部过约束的总数ν为n-3。该机构中不存在局部自由度,因此局部自由度的数目ξ为0。故该并联指向机构的自由度数m可根据kutzbach-gr
ü
bler公式计算。
32.本实施例提供的一种新型精密柔性并联指向机构,包含一个静平台、一个动平台、16个柔性铰链、12个连杆(第二柔性铰链5含有2个铰链一个连杆)。根据螺旋理论求得机构的阶为5,再由kutzbach-gr
ü
bler公式计算机构的自由度:
[0033][0034]
式中:m表示并联指向机构的自由度;λ表示机构的阶;n表示包括机架在内的构件数目;g表示并联指向机构的总运动副数目;fi表示第i个运动副的自由度数;v表示并联指向机构中全部过约束的总数;ξ表示并联指向机构中存在的局部自由度。
[0035]
计算得出m=2,即并联指向机构的自由度为2,由反螺旋理论可知,该并联指向机构职能是两个转动自由度,即动平台可以在两个方向上实现转动。本实施例的基于柔性铰链的柔性并联指向机构是一种典型的具有集中柔度的全柔性机构,其中被动关节采用的柔
性铰链能够依靠其自身的变形提供与之相连的运动部件之间的运动,最终得到动平台的精密指向。
[0036]
本实施例的静平台和连杆之间以及连杆和动平台之间通过柔性铰链连接,柔性铰链具有无间隙、无摩擦、无润滑、高精度等优点、可以使机构具有高精度、高分辨率、高重复定位精度的特性。
[0037]
本实施例的中所使用的柔性铰链全部为直圆形柔性铰链,相比于其他造型的柔性铰链而言,直圆形柔性铰链转动精度高、轴漂小、加工简单,使得新型精密柔性并联指向机构的结构更加简单、紧凑,同时降低制造成本。
[0038]
尽管本说明书较多地使用了静平台1、压电陶瓷驱动器2、第一柔性铰链3、连杆4、第二柔性铰链5、连杆6、动平台7等术语,但并不排除使用其他术语的可能性。使用这些术语仅仅是为了更方便的描述本发明的本质,把它们解释成任何一种附加的限制都是与本发明精神相违背的。
[0039]
应当理解的是,除非另有明确的规定和限定,本说明书中采用的术语“安装”、“相连”、“连接”应做广义理解,例如,可以是固定连接,也可以是可拆卸连接,或一体地连接;可以是机械连接,也可以是电连接;可以是直接相连,也可以通过中间媒介间接相连,可以是两个元件内部的连通。“第一”“第二”“第三”“第四”不代表任何的序列关系,仅是为了方便描述进行的区分。对于本领域的普通技术人员而言,可以具体情况理解上述术语在本发明中的具体含义。
[0040]
应当理解的是,上述针对较佳实施例的描述较为详细,并不能因此而认为是对本发明专利保护范围的限制,本领域的普通技术人员在本发明的启示下,在不脱离本发明权利要求所保护的范围情况下,还可以做出替换或变形,均落入本发明的保护范围之内,本发明的请求保护范围应以所附权利要求为准。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。