1.本发明涉及巡检机器人技术领域,具体为一种高稳定性输送机用巡检机器人。
背景技术:
2.国内煤矿高校开展了皮带机巡检机器人相关研究,有单位研发出了产品进行应用,但还有以下关键技术亟待突破:1煤矿井下皮带运输巷道有甲烷、一氧化碳等易燃易爆气体,有矿尘,有水雾及淋水,有道路积水,有巷道形变,有转弯爬坡,里程长、空间狭窄,皮带机巡检机器人本体及行走机构应能适应这些复杂环境。现有自驱动的皮带机巡检机器人均设计为一体式,车体较高或较长,在煤矿井下部分空间狭窄或转弯半径小的巷道应用受限。目前,皮带机巡检机器人的行走方式有悬线牵引式、循环轨道链条传动式、双轨自驱轮式、单轨自驱齿轮齿条式、单轨自驱轮式。这些行走方式各有优缺点,应综合考虑防爆、转弯、坡道等多种因素设计巡检机器人的行走机构。
技术实现要素:
3.(一)解决的技术问题
4.针对现有技术的不足,本发明提供了一种高稳定性输送机用巡检机器人,解决了防爆、转弯、坡道等问题。
5.(二)技术方案
6.为实现以上目的,本发明通过以下技术方案予以实现:一种高稳定性输送机用巡检机器人,包括轨道、机器人本体和充电站对接调整机构,所述轨道的内部两侧均滚动连接有滚轮,所述滚轮的一侧设置有从动轮,所述滚轮和从动轮的一端均设置有隔防爆型驱动器,所述隔防爆型驱动器的一侧固定连接有隔板,一端所述隔板的底端固定连接有电源箱,所述电源箱的内部中处固定连接有机器人本体,所述机器人本体的底端固定连接有支撑板,且支撑板的底端一侧固定连接有第一减速机,所述第一减速机的一侧设置有第一联轴器;
7.所述另一端所述隔板的底端固定连接有机构箱体,所述机构箱体的底端固定连接有通信控制器,所述电源箱的底部一端中处固定连接有云台摄像仪,所述电源箱的一侧固定连接有超声波雷达,所述机构箱体的内部固定连接有充电站对接调整机构,所述充电站对接调整机构的底端两侧固定连接有连接杆,且连接杆的底端固定连接有底板,所述底板的底部一端固定连接有电动机;
8.所述隔防爆型驱动器的内部固定连接有驱动电机,且驱动电机的驱动端设置有电机轴,且电机轴的一端固定连接有链轮,所述链轮的底端啮合有链条,所述链条和轨道固定连接。
9.优选的,所述电动机的一端设置有电机轴,且电机轴的一端固定连接有第二联轴器。
10.优选的,所述第二联轴器的一端固定连接有第二减速机,所述第二减速机的一端
设置有缓冲机构。
11.优选的,所述第一减速机的另一端设置有鼓型内齿轮,所述鼓型内齿轮的外部粘合有鼓型外齿轮,且鼓型外齿轮和缓冲机构固定连接。
12.优选的,所述从动轮和滚轮之间设置有稳定模块,且稳定模块和隔板固定连接。
13.优选的,所述第一联轴器的一端设置有发电机。
14.优选的,所述轨道呈工字形。
15.工作原理:在使用时首先通过将隔防爆型驱动器5的内部设置有驱动件,通过驱动件进行驱动滚轮3在轨道1的内部进行滚动,实现移动操作,在通过倾斜角度时驱动电机进行工作,带动链轮4进行转动,转动后通过链轮4和链条2进行啮合转动,达到移动倾斜角度移动,同时稳定性更强,同时电源箱8的底端一侧设置有超声波雷达10进行物体感应控制,在电源箱8的底端中部一侧固定连接有云台摄像仪23,将云台摄像仪23实时记录,通过机器人本体13实现控制移动,而移动后通过发电机14供电操作,随后通过第一联轴器15带动第一减速机16转动,转动后通过鼓型内齿轮17和鼓型外齿轮18啮合,通过电动机22转动驱动第二联轴器21和第二减速机20配合转动,实现发电进行供电操作,使充电站对接调整机构12和机器人本体13连接,实现充电。
16.(三)有益效果
17.本发明提供了一种高稳定性输送机用巡检机器人。具备以下有益效果:
18.1、通过链轮和链条啮合实现传动,对链条安装精度要求低,链轮和链条配合要求精度低,链轮和链条属于柔性连接可以解决机器人轨道爬坡拐弯和爬坡结束拐弯处的准确啮合问题,链条为标准件,成本低、易维护。
19.2、通过电动机实现驱动,使充电站对接调整机构的电动机将电能转换为机械能,再用机械能带动机器人本体自带的发电机发电,为机器人本体的蓄电池充电;在煤矿井下,纯机械连接可避免电气连接带来的隔爆设计及电气闭锁存在的安全隐患,与无线充电方法相比较,隔爆电动机与发电机组合可提供大功率电能输出,满足巡检机器人大功率、长续航的蓄电池快速充电的需求。
附图说明
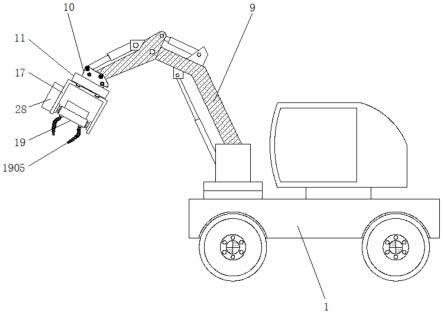
20.图1为本发明的立体结构示意图;
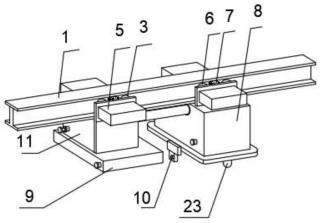
21.图2为本发明的轨道和链条立体结构示意图;
22.图3为本发明的链轮侧视示意图;
23.图4为本发明的剖面侧视示意图。
24.其中,1、轨道;2、链条;3、滚轮;4、链轮;5、隔防爆型驱动器;6、从动轮;7、托架;8、电源箱;9、通信控制器;10、超声波雷达;11、机构箱体;12、充电站对接调整机构;13、机器人本体;14、发电机;15、第一联轴器;16、第一减速机;17、鼓型内齿轮;18、鼓型外齿轮;19、缓冲机构;20、第二减速机;21、第二联轴器;22、电动机;23、云台摄像仪。
具体实施方式
25.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于
本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
26.实施例一:
27.如图1-4所示,本发明实施例提供一种高稳定性输送机用巡检机器人,包括轨道1、机器人本体13和充电站对接调整机构12,轨道1的内部两侧均滚动连接有滚轮3,通过将隔防爆型驱动器5的内部设置有驱动件,通过驱动件进行驱动滚轮3在轨道1的内部进行滚动,实现移动操作,滚轮3的一侧设置有从动轮6,通过从动轮6进行辅助滚动,滚轮3和从动轮6的一端均设置有隔防爆型驱动器5,隔防爆型驱动器5的一侧固定连接有隔板,一端隔板的底端固定连接有电源箱8,通过电源箱8进行内部供电,电源箱8的内部中处固定连接有机器人本体13,机器人本体13的发电机14逐渐靠近变频电动机22时,变频电动机22缓慢旋转,机器人本体13发电机14转轴上的鼓型内齿轮17与变频电动机22输出轴上的鼓型外齿轮18进行对接,实现啮合转动,机器人本体13的底端固定连接有支撑板,且支撑板的底端一侧固定连接有第一减速机16,第一减速机16的一侧设置有第一联轴器15,第一联轴器15的一端设置有发电机14,第一减速机16的另一端设置有鼓型内齿轮17,鼓型内齿轮17的外部粘合有鼓型外齿轮18,且鼓型外齿轮18和缓冲机构19固定连接,轨道1呈工字形;
28.另一端隔板的底端固定连接有机构箱体11,机构箱体11的底端固定连接有通信控制器9,电源箱8的底部一端中处固定连接有云台摄像仪23,通过云台摄像仪23进行远程查看操作,电源箱8的底端一侧设置有超声波雷达10进行物体感应控制,在电源箱8的底端中部一侧固定连接有云台摄像仪23,将云台摄像仪23实时记录,电源箱8的一侧固定连接有超声波雷达10,机构箱体11的内部固定连接有充电站对接调整机构12,充电站对接调整机构12通过行程开关检测到对接到位信号后,变频电动机22全速运行,带动发电机14为机器人的蓄电池充电,充电站对接调整机构12的底端两侧固定连接有连接杆,且连接杆的底端固定连接有底板,底板的底部一端固定连接有电动机22,电动机22的一端设置有电机轴,且电机轴的一端固定连接有第二联轴器21,第二联轴器21的一端固定连接有第二减速机20,第二减速机20的一端设置有缓冲机构19;
29.隔防爆型驱动器5的内部固定连接有驱动电机,且驱动电机的驱动端设置有电机轴,且电机轴的一端固定连接有链轮4,链轮4的底端啮合有链条2,通过倾斜角度时驱动电机进行工作,带动链轮4进行转动,转动后通过链轮4和链条2进行啮合转动,达到移动倾斜角度移动,同时稳定性更强,链条2和轨道1固定连接,从动轮6和滚轮3之间设置有稳定模块7,且稳定模块7和隔板固定连接,通过稳定模块7进行检测移动的稳定性。
30.实施例二:
31.当机器人本体13的发电机14逐渐靠近变频电动机22时,变频电动机22缓慢旋转,机器人本体13发电机14转轴上的鼓型内齿轮17与变频电动机22输出轴上的鼓型外齿轮18进行啮合对接,当鼓型内齿轮17和鼓型外齿轮18出现内齿和外齿啮合时,机器人本体13继续缓慢行驶,鼓型外齿轮18后端的弹簧缓冲机构19可以使鼓型外齿轮18后退一定距离,此时因变频电动机22转轴缓慢转动,可以让啮合的内齿和外齿滑动进行啮合配合,从而保证了机器人本体13的发电机14与充电站的变频电动机22自动成功啮合。充电站对接调整机构12通过行程开关检测到对接到位信号后,变频电动机22全速运行,带动发电机14为机器人的蓄电池充电。
32.尽管已经示出和描述了本发明的实施例,对于本领域的普通技术人员而言,可以理解在不脱离本发明的原理和精神的情况下可以对这些实施例进行多种变化、修改、替换和变型,本发明的范围由所附权利要求及其等同物限定。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。