1.本发明涉及模式识别技术领域,特别涉及一种教练车驾驶辅助练习方法及装置。
2.随着人口增加,私家车的数量逐年增加。2021年全国机动车保有量3.95亿辆,比2020年增加2350万辆,增长6.32%。生活中,私家车已经成为了必备的代步工具。据公安部发布2021年全国驾驶人数据,新领证驾驶人2750万人,同比增长23.25%。从数据集可以看出,人们不可避免地要进行驾驶证的考试。然而在驾校学习过程中,一方面存在教练少、学员多的情况,导致教练不能照顾到每一位学员,直接影响到学员的练习进度和效果;另一方面学员在学习的过程中难以直观的理解教练传授的驾驶技巧。学员的驾驶练习包括四个科目,其中科目二的驾驶练习最容易出现上述的情况。公开号为cn111667742a的中国专利公开的一种教练车智能辅助训练方法及系统,提供了一种无教练指导情况下的教练车驾驶辅助练习方法。但是该专利存在一些不足:练习路线是预设的,造成练习路线对于不同的教练车和练习项目场地的自适应性差,不利于推广应用;未给出驾驶过程中的起始、结束、方向盘打满操作等场地关键点信息,不利于学员对练车路线关键位置的驾车练习。
技术实现要素:
3.为了解决
背景技术:
提出的技术问题,本发明提出了一种教练车驾驶辅助练习方法及装置,驾校场地的摄像头实时监控学员的驾驶练习过程,学员从教练车驾驶室的触摸显示屏上实时观察自己的驾驶路线,并可通过触摸显示屏上显示的场地关键点、练习路线等驾驶辅助练习信息进行驾驶练习,又可通过语音提示的驾驶辅助练习信息进行驾驶练习。本发明重点提供一种训练项目场地的关键点和练习路线的自动实现方法,提供一种教练车偏离角度的自动实现方法,根据教练车参数和场地参数自动生成驾驶辅助练习信息,增强了驾驶辅助练习信息对教练车和练习项目场地的自适应性,有利于教练车驾驶辅助练习方法及装置的推广应用;实现了教练车的实时跟踪和跟踪框的可倾斜,提高了教练车位置信息的准确性。本发明为科目二的倒车入库、侧方停车、曲线行驶、直角转弯和坡道定点共五个练习项目的场地提供教练车驾驶辅助练习功能。
4.为了达到上述目的,本发明采用以下技术方案实现:
5.一种教练车驾驶辅助练习方法,包括如下步骤:
6.步骤1:根据场地进行系统初始设置;
7.步骤2:在场地图像上建立坐标系,自动生成场地关键点和练习路线的驾驶辅助练习信息;
8.步骤3:从场地图像中获取教练车的初始位置;
9.步骤4:动态跟踪运动的教练车,确定教练车的车身中心坐标和后轴中心坐标信息;
10.步骤5:根据教练车运动方向和练习路线切线方向自动生成偏离角度的驾驶辅助练习信息;
11.步骤6:根据场地关键点、练习路线和偏离角度生成教练车的驾驶辅助提示信息,
并进行语音提示;
12.步骤7:判断是否切换练习项目的场地,如果是则转到步骤1,否则转到步骤4。
13.进一步,所述的步骤1初始设置,步骤如下:
14.步骤1-1:根据对应的场地调用场地摄像头;
15.步骤1-2:根据触摸显示屏显示的场地图像调整摄像头的方向和焦距;
16.步骤1-3:根据实际驾驶的教练车选择教练车的模板图像,从数据库中读取教练车的模板图像数据。
17.进一步,所述的步骤2生成场地关键点和练习路线,步骤如下:
18.步骤2-1:读取摄像头采集的场地图像;
19.步骤2-2:根据场地标线矫正图像的畸变,获得矫正后的场地图像;
20.步骤2-3:在矫正后的场地图像上标定坐标系原点的位置,并在原点处建立坐标系,将原点与坐标系显示在触摸显示屏上;
21.步骤2-4:根据教练车参数、场地参数在坐标系中生成关键点坐标,将关键点显示在触摸显示屏上;
22.步骤2-5:根据教练车参数、场地参数和关键点坐标在坐标系中生成练习路线,将练习路线显示在触摸显示屏上。
23.进一步所述的步骤2-2矫正场地图像过程如下:
24.根据场地标线颜色是黄色的特征筛选出图像中的黄色像素点,使用传统的轮廓检测算法获得黄色标线的轮廓数据,根据轮廓数据确定轮廓的最小外接四边形,获取最小外接四边形的四顶点,利用传统的透视变换算法矫正四个顶点,获得矫正后的场地图像。
25.进一步,所述的步骤2-3坐标系原点包括:
26.科目二有五个练习项目的场地,五个场地的坐标系原点是不同的;
27.倒车入库场地的坐标系原点为车库入口的中心点,侧方停车场地的坐标系原点为侧方库的右边拐角点,曲线行驶场地的坐标系原点为两个弯道斜街处的中间点,直角转弯场地的坐标系原点为直角方向两行车道中心线的交点,坡道定点场地的坐标系原点为桩杆线与右边缘线的交点。
28.进一步,所述的步骤2-4生成关键点坐标过程如下:
29.从数据库中读取教练车和场地的参数,教练车的参数包括车身长度v
l
、车身宽度vw、车身轴距l、车身轴宽w、车辆方向最大转弯角β,倒车入库场地的参数有车库深度rh、车库宽度rw、行车道宽r
x
、控制线距离rk,侧方停车场地的参数有车位长度p
l
、车位宽度pw、行车道宽p
x
,曲线行驶场地的参数有弯道半径tr,直角转弯场地的参数有行车道宽q
x
、行车道长q
l
,坡道定点场地的参数有定点坡长s
l
;
30.根据教练车和场地的参数计算教练车后轴中心的转弯半径r,如下:
[0031][0032]
科目二有五个练习项目的场地,在坐标系中生成的五个场地关键点坐标是不同的,并且在降低教练车压线风险的原则上确定关键点坐标与场地标线之间的最优距离;
[0033]
倒车入库场地的关键点有av(x
v1
,y
v1
)、bv(x
v2
,y
v2
)、cv(x
v3
,y
v3
)、dv(x
v4
,y
v4
)、ev(x
v5
,y
v5
)和fv(x
v6
,y
v6
),av(x
v1
,y
v1
)定义为左侧入库起始点和左侧出库结束点,bv(x
v2
,y
v2
)定义为
左测入库方向盘左打满点和左测出库方向盘回正点,cv(x
v3
,y
v3
)定义为右测入库方向盘右打满点和右测出库方向盘回正点,dv(x
v4
,y
v4
)定义为右侧入库起始点和右侧出库结束点,ev(x
v5
,y
v5
)定义为入库方向盘回正点、左测出库方向盘左打满点和右测出库方向盘右打满点,fv(x
v6
,y
v6
)定义为入库结束点和出库起始点;
[0034]
根据教练车和场地的参数生成倒车入库场地的关键点坐标,计算公式如下:
[0035][0036][0037][0038][0039][0040][0041]
侧方停车场地的关键点有a
p
(x
p1
,y
p1
)、b
p
(x
p2
,y
p2
)、c
p
(x
p3
,y
p3
)、d
p
(x
p4
,y
p4
)和e
p
(x
p5
,y
p5
),a
p
(x
p1
,y
p1
)定义为入侧方位结束点和出侧方位起始点,b
p
(x
p2
,y
p2
)定义为入侧方位方向盘左打满点和出侧方位方向盘回正点,c
p
(x
p3
,y
p3
)定义为入侧方位方向盘回正点和出侧方位方向盘右打满点,d
p
(x
p4
,y
p4
)定义为入侧方位方向盘右打满点和出侧方位方向盘回正点,e
p
(x
p5
,y
p5
)定义为入侧方位起始点和出侧方位结束点;
[0042]
根据教练车和场地的参数生成侧方停车场地的关键点坐标,计算公式如下:
[0043][0044][0045][0046][0047][0048]
曲线行驶场地的关键点有a
t
(x
t1
,y
t1
)、b
t
(x
t2
,y
t2
)和o(0,0),a
t
(x
t1
,y
t1
)定义为入弯道起始点和方向盘左打点,b
t
(x
t2
,y
t2
)定义为出弯道结束点,o(0,0)定义为方向盘切换右打点;
[0049]
根据教练车和场地的参数生成曲线行驶场地的关键点坐标,计算公式如下:
[0050][0051][0052]
直角转弯场地的关键点有aq(x
q1
,y
q1
)、bq(x
q2
,y
q2
)、cq(x
q3
,y
q3
)和dq(x
q4
,y
q4
),aq(x
q1
,y
q1
)定义为入直角起始点,bq(x
q2
,y
q2
)定义为入直角方向盘左打满点,cq(x
q3
,y
q3
)定义为出直角方向盘回正点,dq(x
q4
,y
q4
)定义为出直角结束点;
[0053]
根据教练车和场地的参数生成直角转弯场地的关键点坐标,计算公式如下:
[0054][0055]
(x
q2
,y
q2
)=(-r,0)
[0056]
(x
q3
,y
q3
)=(0,r)
[0057][0058]
半坡定点场地的关键点有as(x
s1
,y
s1
)和bs(x
s2
,y
s2
),as(x
s1
,y
s1
)定义为入半坡起始点,bs(x
s2
,y
s2
)定义为定点停车点;
[0059]
根据教练车和场地的参数生成半坡定点场地的关键点坐标,计算公式如下:
[0060][0061][0062]
进一步,所述的步骤2-5生成练习路线过程如下:
[0063]
科目二有五个练习项目的场地,在坐标系中生成的五个场地练习路线是不同的,并且在降低教练车压线风险的原则上确定练习路线与场地标线之间的最优距离;
[0064]
倒车入库场地的左侧是以a
v-b
v-e
v-fv为练习路线,倒车入库场地的右侧是以d
v-c
v-e
v-fv为练习路线;
[0065]
根据教练车参数、场地参数和关键点坐标生成倒车入库场地的练习路线,倒车入库场地的练习路线上一点(x,y)按照下面的分段函数计算,如下:
[0066][0067]
侧方停车场地是以e
p-d
p-c
p-b
p-a
p
为练习路线;
[0068]
根据教练车参数、场地参数和关键点坐标生成侧方停车场地的练习路线,侧方停车场地的练习路线上一点(x,y)按照下面的分段函数计算,如下:
[0069][0070]
曲线行驶场地是以a
t-o-b
t
为练习路线;
[0071]
根据教练车参数、场地参数和关键点坐标生成曲线行驶场地的练习路线,曲线行驶场地的练习路线上一点(x,y)按照下面的分段函数计算,如下:
[0072][0073]
直角转弯场地是以a
q-b
q-c
q-dq为练习路线;
[0074]
根据教练车参数、场地参数和关键点坐标生成直角转弯场地的练习路线,直角转弯场地的练习路线上一点(x,y)按照下面的分段函数计算,如下:
[0075][0076]
坡道定点场地是以a
s-bs为练习路线;
[0077]
根据教练车参数、场地参数和关键点坐标生成坡道定点场地的练习路线,坡道定点场地的练习路线上一点(x,y)按照下面的分段函数计算,如下:
[0078]
y=y
s1
,x
s1
≤x≤x
s2
[0079]
进一步,所述的步骤3获取教练车的初始位置过程如下:
[0080]
从摄像头采集的场地图像中搜索区域图像,通过传统的sift特征匹配算法计算模板图像与区域图像的匹配度,将最大匹配度的区域图像确定为教练车的初始图像,通过传统的透视变换算法对教练车的初始图像进行矫正,在坐标系中确定矫正后教练车的初始图像位置,将初始图像位置确定为教练车的初始跟踪框位置。
[0081]
进一步,所述的步骤4动态跟踪教练车过程如下:
[0082]
调用传统的dsst目标跟踪模型,输入摄像头采集的场地图像和教练车的初始跟踪框位置,在坐标系中获得教练车的新跟踪框位置;
[0083]
更新初始跟踪框位置,重复上述的过程,实现动态跟踪教练车。
[0084]
针对教练车跟踪框中的图像调用传统的轮廓检测算法,提取教练车的最外侧轮廓,根据外侧轮廓确定教练车的可倾斜跟踪框,依据可倾斜跟踪框在坐标系中的位置信息确定教练车的车身中心坐标和后轴中心坐标;
[0085]
可倾斜跟踪框完全贴合教练车的外轮廓,确定的教练车位置更为准确。
[0086]
进一步,所示的步骤5生成偏离角度过程如下:
[0087]
根据当前帧场地图像中的车身中心坐标和上一帧场地图像中的车身中心坐标,生成教练车的运动方向角度α1,计算公式如下:
[0088]
[0089]
(x
t1
,y
t1
)为当前帧场地图像中教练车的车身中心坐标,(x
t1-1
,y
t1-1
)为上一帧场地图像中教练车的车身中心坐标;
[0090]
根据当前帧场地图像中的后轴中心坐标和上一帧场地图像中的后轴中心坐标,生成教练车的运动方向角度α2,如下:
[0091][0092]
(x
t2
,y
t2
)为当前帧场地图像中教练车的后轴中心坐标,(x
t2-1
,y
t2-1
)为上一帧场地图像中教练车的后轴中心坐标;
[0093]
科目二有五个练习项目的场地,在坐标系中生成的五个场地练习路线切线方向角度是不同的;
[0094]
生成倒车入库场地的练习路线切线方向角度αv,计算公式如下:
[0095][0096]
生成侧方停车场地的练习路线切线方向角度α
p
,计算公式如下:
[0097][0098]
生成曲线行驶场地的练习路线切线方向角度α
t
,计算公式如下:
[0099][0100]
生成直角转弯场地的练习路线切线方向角度αq,计算公式如下:
[0101][0102]
生成坡道定点场地的练习路线切线方向角度αs,计算公式如下:
[0103]
αs=0
°
,x
s1
≤x
t1
≤x
s2
[0104]
科目二有五个练习项目的场地,在坐标系中五个场地的教练车运动方向偏离练习路线切线方向的角度是不同的;
[0105]
倒车入库场地的偏离角度为α=a
2-αv,侧方停车场地的偏离角度为α=a
2-α
p
,曲线行驶场地的偏离角度为α=a
1-α
t
,直角转弯场地的偏离角度为α=a
2-αq,坡道定点场地的偏离角度为α=a
1-αs;
[0106]
对偏离角度的象限进行调整,如下:
[0107][0108]
进一步,所述步骤6语音提示过程如下:
[0109]
科目二有五个练习项目的场地,当学员驾驶教练车经过五个场地的关键点坐标位置时语音提示是不同的,系统根据步骤2-4中五个场地的关键点定义进行语音提示,用于辅助学员对驾驶过程中起始、结束、方向盘操作等关键点的练习;
[0110]
偏离角度反应了教练车运动方向偏离练习路线切线方向的程度,用于辅助学员驾驶练习最优路线,根据偏离角度语音提示学员驾驶的教练车是否偏离练习路线;
[0111]
并且,当偏离角度α大于5度时且正向行驶时提示向右微打方向盘,当偏离角度α大于5度时且倒向行驶时提示向左微打方向盘,当偏离角度α小于-5度且正向行驶时提示向左微打方向盘,当偏离角度α小于-5度且倒向行驶时提示向右微打方向盘。
[0112]
进一步,所述的步骤7切换场地过程如下:
[0113]
如果学员需要切换练习项目的场地,会在触摸显示屏的显示窗口选择场地,系统转到步骤1;
[0114]
如果学员未选择新的场地,系统转到步骤4。
[0115]
一种教练车驾驶辅助练习装置,包括以下模块:
[0116]
摄像头模块,由五个摄像头组成,用于实现实时采集五个练习项目的场地图像,并具有wifi数据传输、变焦倍数可调、云台方向可调功能;
[0117]
显示模块,由触摸显示屏组成,用于实时显示窗口布局、场地图像、教练车、跟踪框和驾驶辅助练习信息;
[0118]
练习信息生成模块,用于生成场地坐标系、场地关键点和练习路线的驾驶辅助练习信息;
[0119]
目标跟踪模块,包含特征匹配模型、目标跟踪模型和轮廓检测模型,用于动态跟踪教练车、生成可倾斜跟踪框和确定教练车实时位置信息;
[0120]
练习信息提示模块,用于生成偏离角度的驾驶辅助练习信息,并根据场地关键点和偏离角度语音提示教练车操作的信息;
[0121]
数据库模块,用于保存教练车驾驶辅助练习方法的程序、数据和参数;
[0122]
嵌入式模块,用于教练车驾驶辅助练习装置的驱动和运行教练车驾驶辅助练习方法的程序;
[0123]
嵌入式模块与显示模块触摸显示屏相连,嵌入式模块与摄像头模块的摄像头通过wifi无线连接;
[0124]
嵌入式模块运行练习信息生成模块,实现场地坐标系、场地关键点和练习路线的自动生成;
[0125]
嵌入式模块运行跟踪模块实现教练车的动态跟踪、跟踪框的实时生成和教练车位置信息的实时更新;
[0126]
嵌入式模块运行练习信息提示模块,完成偏离角度的自动生成,语音提示教练车操作的信息;
[0127]
嵌入式模块运行数据库模块,实现对教练车驾驶辅助练习的程序、数据和参数的保存;
[0128]
嵌入式模块为跟踪模块、练习信息生成模块和练习信息提示模块提供运算能力。
[0129]
与现有技术相比,本发明的有益效果是:
[0130]
1)本发明的一种教练车驾驶辅助练习方法及装置,提供了根据教练车参数和场地参数自动生成五个训练项目场地的关键点和练习路线的方法,提供了根据教练车参数、场地参数和关键点坐标自动生成五个训练项目场地的教练车偏离角度的方法,增强了练习路线、场地关键点和偏离角度等驾驶辅助练习信息对教练车和练习项目场地的自适应性,有利于教练车驾驶辅助练习方法及装置的推广应用;
[0131]
2)本发明的一种教练车驾驶辅助练习方法及装置,实现了五种练习项目场地的智能化教练车驾驶辅助练习,实现了场地关键点和练习路线的驾驶辅助练习信息的可视化观察,实现了场地关键点、练习路线偏离、方向盘操作等驾驶辅助练习信息的语音式提示;
[0132]
3)本发明的一种教练车驾驶辅助练习方法及装置,通过目标跟踪模块结合特征匹配模型、目标跟踪模型和轮廓检测模型,实现了教练车跟踪框的可倾斜和实时跟踪,提高了教练车位置信息的准确性。
附图说明
[0133]
图1是本发明实施例提供的一种教练车驾驶辅助练习方法的主流程图;
[0134]
图2是本发明实施例提供的一种初始设置的子流程图;
[0135]
图3是本发明实施例提供的一种生成场地关键点和练车路线的子流程图;
[0136]
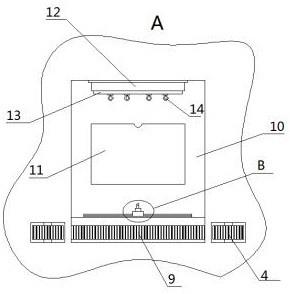
图4是本发明实施例提供的一种窗口1布局示意图;
[0137]
图5是本发明实施例提供的一种窗口2布局示意图;
[0138]
图6是本发明实施例提供的一种窗口3布局示意图;
[0139]
图7是本发明实施例提供的一种窗口4布局示意图;
[0140]
图8是本发明实施例提供的一种含五个练习项目的场地布局示意图;
[0141]
图9是本发明实施例提供的一种教练车相关尺寸示意图;
[0142]
图10是本发明实施例提供的一种倒车入库场地示意图;
[0143]
图11是本发明实施例提供的一种侧方停车场地示意图;
[0144]
图12是本发明实施例提供的一种曲线行驶场地示意图;
[0145]
图13是本发明实施例提供的一种直角转弯场地示意图;
[0146]
图14是本发明实施例提供的一种坡道定点场地示意图;
[0147]
图15是本发明实施例提供的一种教练车驾驶辅助练习装置的功能模块图。
具体实施方式
[0148]
以下结合附图对本发明提供的具体实施方式进行详细说明。
[0149]
图1-图3流程图中,标号的第1个字母s表示步骤,第2个数字的值1表示流程图,第3个数字表示主流程图的步骤,第4个数字表示子流程图的步骤。
[0150]
本发明的一种教练车驾驶辅助练习方法,主流程如图1所示,包括如下步骤:
[0151]
s1.1.0:初始设置。
[0152]
当学员进入教练车时会在窗口1选择场地,或者学员切换场地时也会在窗口1选择场地;系统会根据场地进行初始设置,包括调用场地的摄像头、调整摄像头的方向和焦距和选择教练车的模板图像。
[0153]
所述的s1.1.0初始设置,子流程如图2所示,步骤如下:
[0154]
s1.1.1:调用场地摄像头。
[0155]
根据学员在窗口1选择的场地,系统通过wifi向相应场地的摄像头发送调用摄像头指令;当摄像头处于空闲状态时,摄像头给系统反馈空闲指令;系统收到摄像头反馈的指令后,提示是否调用摄像头;学员点击确认后,系统进入窗口2。
[0156]
所述的s1.1.1窗口1包括:
[0157]
如图4所示,触摸显示屏上显示窗口1;场地选择区域包括倒车入库、侧方停车、曲线行驶、直角转弯和坡道定点共五个组件,用于选择练习项目的场地;确认组件用于进入窗口2;窗口1的提示区域用于显示提示信息。
[0158]
s1.1.2:调整摄像头的方向和焦距。
[0159]
进入窗口2后,系统会通过wifi接收摄像头采集的场地图像,并在窗口2中显示;学员检查窗口2中显示的场地图像;当窗口2没有全面显示场地图像时,学员需要通过窗口2中的旋钮组件调整摄像头的方向,直到窗口2全面显示场地图像为止;拖动窗口2中的滑块组件调整摄像头的焦距,直到清晰显示场地图像为止;调整摄像头完成后,学员通过点击确认进入窗口3。
[0160]
摄像头1采集的是倒车入库的场地图像,摄像头2采集的是侧方停车的场地图像,摄像头3采集的是曲线行驶的场地图像,摄像头4采集的是直角转弯的场地图像,摄像头5采集的是坡道定点的场地图像。
[0161]
所述的s1.1.2窗口2包括:
[0162]
如图5所示,触摸显示屏上显示窗口2;图像显示区域用于显示摄像头采集的场地图像;旋钮组件用于调整摄像头的方向,滑块组件用于调整摄像头的焦距,确认组件用于进入窗口3,返回组件用于退回窗口1。
[0163]
s1.1.3:选择教练车的模板图像。
[0164]
进入窗口3后,系统自动选择教练车的模板图像,并框选出推荐的教练车模板图像;学员检查窗口3框选的教练车模板图像是否是当前实际驾驶的教练车;如果模板图像是当前教练车,学员需要点击确认,系统进入窗口4;如果模板图像不是当前教练车,学员需要选择窗口3中显示的教练车模板图像,选择完成后学员点击确认,系统从数据库中读取教练车的模板图像数据,进入窗口4。
[0165]
所述的s1.1.3窗口3包括:
[0166]
如图6所示,触摸显示屏上显示窗口3;模板选择区域包括6个不同的教练车模板图像;教练车的外框表示选中了一个教练车模板图像;确认组件于进入窗口4,返回组件用于退回窗口2。
[0167]
所述的s1.1.3窗口4包括:
[0168]
如图7所示,触摸显示屏上显示窗口4;图像显示区域用于显示场地图像;返回组件用于退回窗口3。
[0169]
s1.2.0:生成场地关键点和练习路线。
[0170]
在摄像头采集的场地图像上建立坐标系、生成场地关键点坐标和生成练习最优路线,用于学员驾驶练习场地关键点和最优路线的可视化观察。
[0171]
所述的s1.2.0生成场地关键点和练习路线,子流程如图3所示,步骤如下:
[0172]
s1.2.1:读取摄像头采集的场地图像。
[0173]
s1.2.2:矫正场地图像。
[0174]
根据场地标线矫正图像的畸变,获得矫正后的场地图像。
[0175]
所述的s1.2.2矫正场地图像过程如下:
[0176]
根据场地标线颜色是黄色的特征筛选出图像中的黄色像素点,使用传统的轮廓检测算法获得黄色标线的轮廓数据;根据轮廓数据确定轮廓的最小外接四边形,获取最小外接四边形的四顶点;利用传统的的透视变换算法矫正四个顶点,获得矫正后的场地图像。
[0177]
s1.2.3:建立坐标系。
[0178]
在矫正后的场地图像中上标定坐标系原点o的位置;根据原点位置建立直角坐标系,以原点的水平方向作为x轴,竖直方向作为y轴;将原点与坐标系显示在触摸显示屏上。
[0179]
所述的s1.2.3坐标系原点包括:
[0180]
科目二有五个练习项目的场地,五个场地的坐标系原点是不同的。
[0181]
倒车入库场地的坐标系原点为车库入口的中心点,侧方停车场地的坐标系原点为侧方库的右边拐角点,曲线行驶场地的坐标系原点为两个弯道斜街处的中间点,直角转弯场地的坐标系原点为直角方向两行车道中心线的交点,坡道定点场地的坐标系原点为桩杆线与右边缘线的交点。
[0182]
s1.2.4:生成关键点坐标。
[0183]
根据教练车参数、场地参数在坐标系中生成关键点坐标的驾驶辅助练习信息,关键点坐标用于辅助学员对驾驶过程中起始、结束、方向盘操作等关键点的练习;将关键点显示在触摸显示屏上。
[0184]
所述的s1.2.4计算关键点坐标过程如下:
[0185]
从数据库中读取教练车和场地的参数;如图9所示,教练车的参数包括车身长度v
l
、车身宽度vw、车身轴距l、车身轴宽w、车辆方向最大转弯角β;如图10所示,倒车入库场地的参数有车库深度rh、车库宽度rw、行车道宽r
x
、控制线距离rk;如图11所示,侧方停车场地的参数有车位长度p
l
、车位宽度pw、行车道宽p
x
;如图12所示,曲线行驶场地的参数有弯道半径tr;如图13所示,直角转弯场地的参数有行车道宽q
x
、行车道长q
l
;如图14所示,坡道定点场地的参数有定点坡长s
l
。
[0186]
根据教练车和场地的参数计算教练车后轴中心的转弯半径参数r,如下:
[0187][0188]
科目二有五个练习项目的场地,在坐标系中生成的五个场地关键点坐标是不同的,并且在降低教练车压线风险的原则上确定关键点坐标与场地标线之间的最优距离。
[0189]
如图10所示,倒车入库场地的关键点有av(x
v1
,y
v1
)、bv(x
v2
,y
v2
)、cv(x
v3
,y
v3
)、dv(x
v4
,y
v4
)、ev(x
v5
,y
v5
)和fv(x
v6
,y
v6
),av(x
v1
,y
v1
)定义为左侧入库起始点和左侧出库结束点,bv(x
v2
,y
v2
)定义为左测入库方向盘左打满点和左测出库方向盘回正点,cv(x
v3
,y
v3
)定义为右测入库方向盘右打满点和右测出库方向盘回正点,dv(x
v4
,y
v4
)定义为右侧入库起始点和右侧出库结束点,ev(x
v5
,y
v5
)定义为入库方向盘回正点、左测出库方向盘左打满点和右测出库方向盘右打满点,fv(x
v6
,y
v6
)定义为入库结束点和出库起始点;根据教练车和场地的参数生成倒车入库场地的关键点坐标,计算公式如下:
[0190][0191][0192][0193][0194][0195][0196]
如图11所示,侧方停车场地的关键点有a
p
(x
p1
,y
p1
)、b
p
(x
p2
,y
p2
)、c
p
(x
p3
,y
p3
)、d
p
(x
p4
,y
p4
)和e
p
(x
p5
,y
p5
),a
p
(x
p1
,y
p1
)定义为入侧方位结束点和出侧方位起始点,b
p
(x
p2
,y
p2
)定义为入侧方位方向盘左打满点和出侧方位方向盘回正点,c
p
(x
p3
,y
p3
)定义为入侧方位方向盘回正点和出侧方位方向盘右打满点,d
p
(x
p4
,y
p4
)定义为入侧方位方向盘右打满点和出侧方位方向盘回正点,e
p
(x
p5
,y
p5
)定义为入侧方位起始点和出侧方位结束点;根据教练车和场地的参数生成侧方停车场地的关键点坐标,计算公式如下:
[0197][0198][0199][0200]
[0201][0202]
如图12所示,曲线行驶场地的关键点有a
t
(x
t1
,y
t1
)、b
t
(x
t2
,y
t2
)和o(0,0),a
t
(x
t1
,y
t1
)定义为入弯道起始点和方向盘左打点,b
t
(x
t2
,y
t2
)定义为出弯道结束点,o(0,0)定义为方向盘切换右打点;根据教练车和场地的参数生成曲线行驶场地的关键点坐标,计算公式如下:
[0203][0204][0205]
如图13所示,直角转弯场地的关键点有aq(x
q1
,y
q1
)、bq(x
q2
,y
q2
)、cq(x
q3
,y
q3
)和dq(x
q4
,y
q4
),aq(x
q1
,y
q1
)定义为入直角起始点,bq(x
q2
,y
q2
)定义为入直角方向盘左打满点,cq(x
q3
,y
q3
)定义为出直角方向盘回正点,dq(x
q4
,y
q4
)定义为出直角结束点;根据教练车和场地的参数生成直角转弯场地的关键点坐标,计算公式如下:
[0206][0207]
(x
q2
,y
q2
)=(-r,0)
[0208]
(x
q3
,y
q3
)=(0,r)
[0209][0210]
如图14所示,半坡定点场地的关键点有as(x
s1
,y
s1
)和bs(x
s2
,y
s2
),as(x
s1
,y
s1
)定义为入半坡起始点,bs(x
s2
,y
s2
)定义为定点停车点;根据教练车和场地的参数生成半坡定点场地的关键点坐标,计算公式如下:
[0211][0212][0213]
s1.2.5生成练习路线。
[0214]
根据教练车参数、场地参数和关键点坐标在坐标系中生成练习路线的驾驶辅助练习信息,练习路线用于辅助学员练习最优路线的驾驶;将练习路线显示在触摸显示屏上。
[0215]
所述的s1.2.5计算练习路线过程如下:
[0216]
科目二有五个练习项目的场地,在坐标系中生成的五个场地练习路线是不同的,并且在降低教练车压线风险的原则上确定练习路线与场地标线之间的最优距离。
[0217]
如图10所示,倒车入库场地的左侧是以a
v-b
v-e
v-fv为练习路线,倒车入库场地的右侧是以d
v-c
v-e
v-fv为练习路线;根据教练车参数、场地参数和关键点坐标生成倒车入库场地的练习路线,倒车入库场地的练习路线上一点(x,y)按照下面的分段函数计算,如下:
[0218][0219]
如图11所示,侧方停车场地是以e
p-d
p-c
p-b
p-a
p
为练习路线;根据教练车参数、场地参数和关键点坐标生成侧方停车场地的练习路线,侧方停车场地的练习路线上一点(x,y)按照下面的分段函数计算,如下:
[0220][0221]
如图12所示,曲线行驶场地是以a
t-o-b
t
为练习路线;根据教练车参数、场地参数和关键点坐标生成曲线行驶场地的练习路线,曲线行驶场地的练习路线上一点(x,y)按照下面的分段函数计算,如下:
[0222][0223]
如图13所示,直角转弯场地是以a
q-b
q-c
q-dq为练习路线;根据教练车参数、场地参数和关键点坐标生成直角转弯场地的练习路线,直角转弯场地的练习路线上一点(x,y)按照下面的分段函数计算,如下:
[0224][0225]
如图14所示,坡道定点场地是以a
s-bs为练习路线;根据教练车参数、场地参数和关键点坐标生成坡道定点场地的练习路线,坡道定点场地的练习路线上一点(x,y)按照下面的分段函数计算,如下:
[0226]
y=y
s1
,x
s1
≤x≤x
s2
[0227]
s1.3.0:获取教练车的初始位置。
[0228]
当教练车出现在练习项目的场地时,系统通过特征匹配的方式获取教练车的初始位置。
[0229]
所述的s1.3.0获取教练车的初始位置过程如下:
[0230]
从摄像头采集的场地图像中搜索区域图像,通过传统的sift特征匹配算法计算模板图像与区域图像的匹配度;将最大匹配度的区域图像确定为教练车的初始图像,通过传统的的透视变换算法对教练车的初始图像进行矫正;在坐标系中确定矫正后教练车的初始图像位置,将初始图像位置确定为教练车的初始跟踪框位置。
[0231]
s1.4.0:动态跟踪教练车。
[0232]
调用目标跟踪算法,动态跟踪运动的教练车,确定教练车的动态跟踪结果获取教练车的车身中心坐标和后轴中心坐标信息。
[0233]
所述的s.1.4.0动态跟踪教练车过程如下:
[0234]
调用传统的dsst目标跟踪算法,输入摄像头采集的场地图像和教练车的初始跟踪框位置,在坐标系中获得教练车的新跟踪框位置;更新初始跟踪框位置,重复上述的过程,实现动态跟踪教练车。
[0235]
针对教练车跟踪框中的图像调用传统的轮廓检测算法,提取教练车的最外侧轮廓,根据外侧轮廓确定教练车的可倾斜跟踪框,依据可倾斜跟踪框在坐标系中的位置信息确定教练车的车身中心坐标和后轴中心坐标;可倾斜跟踪框完全贴合教练车的外轮廓,确定的教练车位置更为准确。
[0236]
s1.5.0:生成偏离角度。
[0237]
根据教练车的车身中心坐标和后轴中心坐标生成教练车运动方向,根据关键点坐标和练习路线生成切线方向,根据教练车运动方向和练习路线切线方向自动生成偏离角度的驾驶辅助练习信息。
[0238]
所述的s1.5.0生成偏离角度过程如下:
[0239]
根据当前帧场地图像中的车身中心坐标和上一帧场地图像中的车身中心坐标,生成教练车的运动方向角度α1,计算公式如下:
[0240][0241]
(x
t1
,y
t1
)为当前帧场地图像中教练车的车身中心坐标,(x
t1-1
,y
t1-1
)为上一帧场地图像中教练车的车身中心坐标。
[0242]
根据当前帧场地图像中的后轴中心坐标和上一帧场地图像中的后轴中心坐标,生成教练车的运动方向角度α2,计算公式如下:
[0243][0244]
(x
t2
,y
t2
)为当前帧场地图像中教练车的后轴中心坐标,(x
t2-1
,y
t2-1
)为上一帧场地图像中教练车的后轴中心坐标。
[0245]
科目二有五个练习项目的场地,在坐标系中生成的五个场地练习路线切线方向角度是不同的。
[0246]
生成倒车入库场地的练习路线切线方向角度αv,计算公式如下:
[0247][0248]
生成侧方停车场地的练习路线切线方向角度α
p
,计算公式如下:
[0249][0250]
生成计算曲线行驶场地的练习路线切线方向角度α
t
,计算公式如下:
[0251][0252]
生成直角转弯场地的练习路线切线方向角度αq,计算公式如下:
[0253][0254]
生成坡道定点场地的练习路线切线方向角度αs,计算公式如下:
[0255]
αs=0
°
,x
s1
≤x
t1
≤x
s2
[0256]
科目二有五个练习项目的场地,在坐标系中五个场地的教练车运动方向偏离练习路线切线方向的角度是不同的。
[0257]
倒车入库场地的偏离角度为α=a
2-αv,侧方停车场地的偏离角度为α=a
2-α
p
,曲线行驶场地的偏离角度为α=a
1-α
t
,直角转弯场地的偏离角度为α=a
2-αq,坡道定点场地的偏离角度为α=a
1-αs,对偏离角度的象限进行调整,如下:
[0258][0259]
s1.6.0:语音提示。
[0260]
根据场地关键点、练习路线和偏离角度生成教练车驾驶辅助提示信息,并进行语音提示。
[0261]
所述s1.6.0语音提示过程如下:
[0262]
科目二有五个练习项目的场地,当学员驾驶教练车经过五个场地的关键点坐标位置时语音提示是不同的,系统根据s1.2.4中五个场地的关键点定义进行语音提示,用于辅助学员对驾驶过程中起始、结束、方向盘操作等关键点的练习。
[0263]
偏离角度反映了教练车运动方向偏离练习路线切线方向的程度,用于辅助学员驾
驶练习最优路线,根据偏离角度语音提示学员驾驶的教练车是否偏离练习路线;当偏离角度α大于5度时且正向行驶时提示向右微打方向盘,当偏离角度α大于5度时且倒向行驶时提示向左微打方向盘,当偏离角度α小于-5度且正向行驶时提示向左微打方向盘,当偏离角度α小于-5度且倒向行驶时提示向右微打方向盘。
[0264]
s1.7.0:切换场地。
[0265]
判断是否切换练习项目的场地。
[0266]
所述的s1.7.0切换场地过程如下:
[0267]
如果学员需要切换练习项目的场地,会在窗口1选择场地,系统转到步骤s1.1.0;如果学员未选择新的场地,系统转到步骤s1.4.0。
[0268]
一种教练车驾驶辅助练习装置,功能结构如图15所示,包括以下模块:
[0269]
摄像头模块10,由五个户外全景式摄像头组成,用于实现实时采集五个练习项目的场地图像,并具有wifi数据传输、变焦倍数可调、云台方向可调功能,包括:
[0270]
实时采集五个练习项目的场地图像;实时采集出现在场地中的教练车图像;通过变焦倍数调节摄像头,支撑窗口2滑块组件调节摄像头的清晰度;通过云台方向调节摄像头,支撑窗口2旋钮组件调节摄像头的监控方向;通过wifi接收系统的指令和传输采集的场地图像数据。
[0271]
显示模块20,由11寸触摸显示屏组成,用于实时显示窗口布局、场地图像、教练车、跟踪框和驾驶辅助练习信息,包括:
[0272]
显示窗口1、2、3和4的布局,为操作者提供可视化的区域;可触摸操作显示窗口上的操作组件;显示摄像头实时采集的场地图像;显示出现在场地的教练车;显示练习项目场地的坐标系;显示练习信息生成模块提供的场地关键点;显示练习信息生成模块提供的练习路线;显示跟踪模块提供的教练车可倾斜跟踪框。
[0273]
练习信息生成模块30,用于自动生成场地坐标系、场地关键点和练习路线的驾驶辅助练习信息,包括:
[0274]
选择五个练习项目场地的原点并生成坐标系;生成五个练习项目场地的关键点坐标;生成五个练习项目场地的练习路线。
[0275]
目标跟踪模块40,包含特征匹配模型、目标跟踪模型和轮廓检测模型,用于动态跟踪教练车、生成跟踪框和确定教练车实时位置信息,包括:
[0276]
通过特征匹配模型获取教练车的初始跟踪框;通过目标跟踪模型调整跟踪框的位置,动态跟踪教练车;通过轮廓检测模型生成可倾斜跟踪框;通过可倾斜跟踪框确定教练车的车身中心坐标和后轴中心坐标实时位置信息。
[0277]
练习信息提示模块50,由嵌入式模块中的语音输出单元组成,用于生成偏离角度的驾驶辅助练习信息,并根据场地关键点和偏离角度语音提示教练车操作的信息,包括:
[0278]
生成教练车运动方向偏离练习路线切线方向的角度;根据偏离角度语音提示教练车运动方向是否偏离练习路线;根据偏离角度语音提示方向盘转向操作的信息;根据五个练习项目的场地关键点语音提示教练车起始、停止和方向盘转向的操作信息。
[0279]
数据库模块60,由嵌入式模块中的存储硬盘组成,用于保存教练车驾驶辅助练习方法的程序、数据和参数,包括:
[0280]
保存窗口的布局数据;保存教练车的模板图像;保存车练车的参数;保存五个练习
项目场地的参数;缓存教练车驾驶辅助练习方法的辅助数据;保持教练车驾驶辅助练习方法的程序。
[0281]
嵌入式模块70,由嵌入式主板组成,具有处理器、内存、存储硬盘、语音输出单元、wifi单元和触摸显示屏接口,用于教练车驾驶辅助练习装置的驱动和运行教练车驾驶辅助练习方法的程序,包括:
[0282]
通过wifi单元,对摄像头进行指令控制和数据读取,运行摄像头模块;与触摸显示屏相连,对显示屏进行驱动,运行显示模块;运行练习信息生成模块,实现场地坐标系、场地关键点和练习路线的自动生成;运行跟踪模块,实现教练车的动态跟踪、跟踪框的实时生成和教练车位置信息的实时更新;运行练习信息提示模块,完成偏离角度的自动生成,通过语音输出单元提示教练车操作的信息;运行数据库模块,通过存储硬盘实现对教练车驾驶辅助练习的程序、数据和参数的保存;为跟踪模块、练习信息生成模块和练习信息提示模块提供运算能力。
[0283]
如图8所示,摄像头模块的五个摄像头分别安装在五个练习项目场地的上方,五个摄像头分别全景监控五个练习项目的场地,摄像头1监控倒车入库场地,摄像头2监控侧方停车场地,摄像头3监控曲线行驶场地,摄像头4监控直角转弯场地,摄像头5监控坡道定点场地;五个练习项目的场地标线是黄颜色的;摄像头模块通过wifi与嵌入式模块进行无线连接,显示模块通过hdmi接口与嵌入式模块相连。
[0284]
以上实施例在以本发明技术方案为前提下进行实施,给出了详细的实施方式和具体的操作过程,但本发明的保护范围不限于上述的实施例。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。