技术特征:
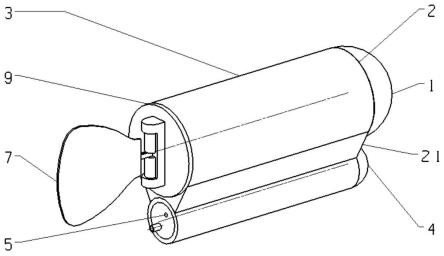
1.一种单关节仿生水下可见光通信无人潜航器,其特征在于:包括透明半球前罩(1)、透明圆柱舱体(3)、压载舱(4)、水泵(5)、单关节仿生鱼鳍(7)、摄像头(12)、处理器(14)、控制器(15)、舵机组件和通信组件,所述通信组件包括分布安装于透明圆柱舱体(3)内的多个可见光通信组件;所述透明半球前罩(1)和单关节仿生鱼鳍(7)分别设置于透明圆柱舱体(3)的前端和尾端,透明半球前罩(1)内设有摄像头(12),舵机组件用于驱动单关节仿生鱼鳍(7)左右摆动,压载舱(4)设置于透明圆柱舱体(3)的底部,水泵(5)密封固定在压载舱(4)的后端,水泵(5)用于向压载舱(4)内泵入或泵出液体;所述处理器(14)、控制器(15)、舵机组件和通信组件安装于透明圆柱舱体(3)内,处理器(14)电信号连接摄像头(12)、控制器(15)和通信组件,舵机组件和水泵电信号连接控制器(15),控制器(15)用于接收处理器(14)发送的指令信息并将指令信息发送给对应的舵机组件或水泵(5)。2.根据权利要求1所述的一种单关节仿生水下可见光通信无人潜航器,其特征在于:所述透明圆柱舱体(3)内设有电池(16),处理器(14)与控制器(15)通过can总线进行连接,电池(16)连接到控制器(15)的电源端口,控制器(15)设有集成降压模块,通过集成降压模块后给控制器(15)与处理器(14)供能,所有通信组件均通过rj45网口与处理器进行连接,进行信号的发送或者接收。3.根据权利要求1所述的一种单关节仿生水下可见光通信无人潜航器,其特征在于:所述透明圆柱舱体(3)内设有透明尾部盖板(22)、竖直隔板(10)、水平隔板(11),透明半球前罩(1)内设有摄像头云台(13);所述透明尾部盖板(22)设置于圆柱舱体(3)的尾端,单关节仿生鱼鳍(7)安装在透明尾部盖板(22)的外侧;竖直隔板(10)设置于圆柱舱体(3)的前端,透明半球前罩(1)位于竖直隔板(10)的外侧;所述水平隔板(11)的两端分别连接透明尾部盖板(22)和竖直隔板(10),摄像头云台(13)固定在竖直隔板(10)朝向透明半球前罩(1)的侧面上,摄像头(12)固定于摄像头云台(13)的前端。4.根据权利要求3所述的一种单关节仿生水下可见光通信无人潜航器,其特征在于:所述舵机组件包括舵机(6)、舵机盘、竖直斜齿轮(8)和水平斜齿轮(9),所述舵机(6)通过舵机盘与竖直斜齿轮(8)进行连接,透明尾部盖板(22)的内侧设有安装竖直斜齿轮(8)的突起轴、连接水平斜齿轮(9)的中轴,竖直斜齿轮(8)与水平斜齿轮(9)啮合;透明尾部盖板(22)的外侧设有连接单关节仿生鱼鳍(7)的连接轴,中轴与连接轴连接并进行防水密封;所述水泵(5)的驱动与控制信号线通过设置于透明尾部盖板(22)的预留通孔接入控制器(15),并通过防水接头进行密封。5.根据权利要求3所述的一种单关节仿生水下可见光通信无人潜航器,其特征在于:所述透明半球前罩(1)和透明圆柱舱体(3)的前端之间设有防水橡胶圈(2),压载舱(4)设置于透明圆柱舱体(3)的底部之间设置连接件(21);所述连接件(21)为一体成型结构,包括连接透明圆柱舱体(3)的底部的第一弧部,连接压载舱(4)的顶部的第二弧部。6.根据权利要求1所述的一种单关节仿生水下可见光通信无人潜航器,其特征在于:所
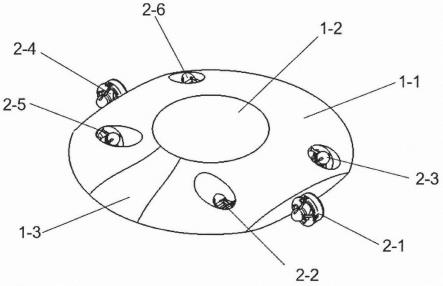
述可见光组件包括分布安装于透明圆柱舱体(3)内的前可见光通信组件(17)、右可见光通信组件(18)、左可见光通信组件(19)和后可见光通信组件(20),各个可见光通信组件设有可见光发出单元、可见光接收单元和ofdm信号调制调解单元。7.一种潜航器控制系统,其特征在于:包括地面站、水下可见光网络通讯舱和一个以上的如权利要求1-6任一所述的潜航器,所述地面站设有地面站处理器、摇杆、以及连接地面站处理器的地面站通信组件,地面站处理器用于采集包括摇杆的摆幅在内的信息并将采集到的信息通过通信组件发送给透明圆柱舱体(3)的处理器(14),所述水下可见光网络通讯舱设有可见光发出装置、可见光接收装置和信号调制解调装置。8.一种潜航器的控制方法,其特征在于,包括如下步骤:潜航器中各个可见光通信组件保持打开状态,每个可见光通信组件用于负责接收预设种类的潜艇器的动作指令,所述潜航器的动作指令来源于水下可见光通信;潜航器接收水下可见光网络通讯舱发出的光信号,与水下可见光网络通讯舱进行预设次数的tcp握手;潜航器接收到水下可见光网络通讯舱发出的可释放潜航器的信号后,开始潜航工作;所述可释放潜航器的信号后由水下可见光网络通讯舱在与潜航器完成预设次数的tcp握手后发出;潜航器通过自带的摄像头采集数字图像信号,并将图像传回水下可见光网络通讯舱,并通过水下可见光网络通讯舱向地面站传送潜艇器已释放的返回信号;潜航器通过水下可见光网络通讯舱接收地面站发出的控制潜航器的运动指令,潜航器执行运动指令时与水下可见光网络通讯舱进行tcp握手。9.根据权利要求8所述的潜航器的控制方法,其特征在于,完成一次tcp握手的流程如下:潜航器接收由网络设备发射出经过调制过的第一光信号;潜航器中的预设的可见光通信组件接收到所述第一光信号后,对第一光信号进行解调处理,并将解调后的数字信号作为tcp握手信号,发送给潜航器内的处理器;潜航器内的处理器接收到来自可见光通信组件发送的tcp握手信号后,从该方向返回tcp握手信号;对应的可见光通信组件对处理器返回的tcp握手信号进行处理,发出第二可见光信号并通过控制第二可见光信号的亮灭,向水下可见光网络通讯舱传回tcp握手信息。10.根据权利要求8所述的潜航器的控制方法,其特征在于:所述地面站设有摇杆并采集摇杆的摆幅信息,摆幅信息用于确定潜航器的左右转动角度,所述摆幅信息或转动角度通过通信模块发送给潜航器的处理器;所述潜航器左右转动角度区间ω与摇杆左右摆幅x之间存在如下关系:当转动角度ω的取值大于180
°
或小于0
°
时,摆幅x被限制在170
°
~180
°
或0
°
~10
°
。
技术总结
本发明公开了一种单关节仿生水下可见光通信无人潜航器、系统及控制方法,潜航器包括透明半球前罩、透明圆柱舱体、压载舱、水泵、单关节仿生鱼鳍、摄像头、处理器、控制器、舵机组件和通信组件,通信组件包括分布安装于透明圆柱舱体内的多个可见光通信组件等。本发明的潜航器设有单关节仿生推进器与压载舱的组合,可以实现在同一水平面实现前进、左右转以及掉头等操作,并且潜航器在运动过程中始终处于低噪声状态,通过使用可见光无线通信技术,可以在不使用脐带缆的同时,实现对无人潜航器的遥控和图像的实时反馈。无人潜航器之间也可以通过可见光无线通信组成物联网,提高无人潜航器与地面站之间的联系,预防无人潜航器丢失。预防无人潜航器丢失。预防无人潜航器丢失。
技术研发人员:张乐泉 蔡玮 李凤婷 郭二源 王妍苏 朱泰亨 陈柯莹 陈科 马国阳 徐力
受保护的技术使用者:南京工程学院
技术研发日:2022.05.05
技术公布日:2022/7/29
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。