1.本发明涉及生态保护技术领域,更具体地说,涉及一种珊瑚生态健康监测的巡游潜艇。
背景技术:
2.珊瑚不仅是诸多海洋生物赖以生存的场所,还是海水的过滤器;同时,珊瑚在造礁过程中固定吸收大量的二氧化碳,对维持地球上的二氧化碳平衡和减轻温室效应也有巨大的作用;但是由于人类近数十年对海洋资源的过度开发、污染,以及对海洋鱼类的滥捕滥杀、对珊瑚礁的掠夺性开采,世界范围内的珊瑚礁生态系统已严重退化。
3.目前在对珊瑚的保护措施中,由于珊瑚的天敌长棘海星由于在适宜的水温和较低的盐度就能存活下来,致使长棘海星在海洋中的数量急剧增多,从而大量捕食珊瑚虫,致使珊瑚生态系统严重退化,而现有技术中,在对珊瑚生态系统进行保护时,往往通过人工潜水的方式将依附在珊瑚表面捕食珊瑚虫的长棘海星进行抓取,以及向长棘海星内注射硫代硫酸柠檬胆盐蔗糖(tcbs)等试剂,导致大批长棘海星病死,但由于试剂成本过高且注射操作复杂,使得在灭杀长棘海星的效果上不高,大多都是通过人工潜水的方式将长棘海星捕抓起来,但由于长棘海星的每一根棘刺里都含有神经毒素,一旦被刺到就会皮肤红肿,疼痛难忍,所以在进行人工捕抓时还需要有丰富潜水经验的人员手持钩子、棍子和袋子下海捡捞长棘海星,以防不明潜水人员受到伤害,从而导致在对长棘海星捕抓效果上并不是很理想,因此,目前急需一种高效抓捕长棘海星的装置来代替人工对长棘海星进行抓捕。
技术实现要素:
4.1.要解决的技术问题
5.针对现有技术中存在的问题,本发明的目的在于提供一种珊瑚生态健康监测的巡游潜艇,可以实现通过配备能使潜艇顺利上升下潜的推进器和实时监测珊瑚接受光照程度、水温、cod浓度的传感系统以及摄像头,对珊瑚环境进行检测监测,并查看珊瑚表面是否具有长棘海星,当观察至具有长棘海星时,夹持机构对长棘海星进行抓取,防止海星对珊瑚的伤害,避免了人工抓取长棘海星时所具备的危险因素。
6.2.技术方案
7.为解决上述问题,本发明采用如下的技术方案。
8.一种珊瑚生态健康监测的巡游潜艇,包括巡游器主体,所述巡游器主体内壁之间嵌设有透明玻璃,所述巡游器主体内壁安装有推进器,所述巡游器主体上端安装有感应模块,所述巡游器主体远离推进器一侧的内壁设有人机交互系统,所述巡游器主体远离推进器一侧的内壁安装有摄像头,所述摄像头位于人机交互系统的右侧,所述巡游器主体内底端固定连接有配重块,所述巡游器主体内底端固定连接有限位板,所述限位板位于配重块的前侧,所述配重块外端安装有夹持机构,所述巡游器主体内顶端安装有驱动电机,所述驱动电机与夹持机构之间电性连接,本方案可以实现通过配备能使潜艇顺利上升下潜的推进
器和实时监测珊瑚接受光照程度、水温、cod浓度的传感系统以及摄像头,对珊瑚环境进行检测监测,并查看珊瑚表面是否具有长棘海星,当观察至具有长棘海星时,夹持机构对长棘海星进行抓取,防止海星对珊瑚的伤害,避免了人工抓取长棘海星时所具备的危险因素。
9.进一步的,所述感应模块包括巡游器主体上端安装的温度传感器,所述温度传感器外端电性连接有光照传感器,所述光照传感器外端电性连接有cod浓度传感器,当巡游器主体潜至水底后,通过摄像头的观测实时向地面传输海底珊瑚影像,同时温度传感器、光照传感器、cod浓度传感器实时在线监测珊瑚临近海域光照、cod等环境因素,掌握珊瑚生长环境恶化趋势,以防止珊瑚生长环境数据超标,从而向地面进行预警。
10.进一步的,所述人机交互系统包括巡游器主体远离推进器一侧内壁固定连接的控制箱,所述控制箱内底端安装有电路板,所述电路板上端安装有控制模块,所述控制模块外端电性连接有信息加工处理模块,所述信息加工处理模块外端电性连接有记录模块,所述记录模块外端电性连接有传输模块,所述传输模块与感应模块、摄像头之间均电性连接,所述控制箱内壁嵌设有汲水机构,所述控制箱内底端设有防水机构,所述防水机构位于电路板外端,当巡游器主体潜至水底后,通过摄像头的观测,将所观测的数据传输至信息加工处理模块,随后信息加工处理模块向记录模块传输信息,从而将信息记录下来,而后记录模块将记录下来的数据传输至传输模块,而后传输模块将数据传输至地面,并且地面的操作人员可通过操作控制模块在水面上控制巡游器主体和监视水下环境。
11.进一步的,所述夹持机构包括配重块前端固定连接的套筒,所述套筒内壁之间滑动连接有伸缩杆,所述伸缩杆左右两端均开凿有多个均匀分布的卡齿槽,所述伸缩杆外端套设有限位套,所述限位套内底端安装有第一卡齿,所述第一卡齿位于伸缩杆左右两侧对称分布,且与卡齿槽啮合连接,所述第一卡齿外端啮合连接有第二卡齿,所述第二卡齿关于伸缩杆左右对称分布,所述限位套内底端转动连接有两个相互对称的转轴,所述转轴外端固定连接有机械抓夹,所述转轴外端固定连接有第三卡齿,所述第三卡齿位于机械抓夹内壁之间,且与第二卡齿啮合连接,当巡游器主体潜至水底后,通过摄像头的观测,发现珊瑚表面具有长棘海星时,在驱动电机的电动驱动下,伸缩杆从套筒内部滑出,致使伸缩杆表面的卡齿槽与第一卡齿啮合转动,使得两个第一卡齿分别做出逆时针转动和顺时针转动,而此时第一卡齿同时带动着两个第二卡齿以及第三卡齿也发生逆时针转动和顺时针转动,从而在第三卡齿转动的作用下致使与之连接的机械抓夹向两侧开合,随后在机械抓夹位于长棘海星外侧时,驱动电机带动伸缩杆向套筒内部收缩,而第一卡齿、第二卡齿、第三卡齿开始向相反的方向转动,致使机械抓夹进行闭合,从而将长棘海星捕抓起来,大大避免了长棘海星对珊瑚生态系统的破坏。
12.进一步的,所述汲水机构包括控制箱四个内壁嵌设的汲水箱,所述汲水箱靠近传输模块的一端开凿有多个均匀分布的通孔,所述汲水箱内部开凿有内置空腔,所述内置空腔与通孔相互连通,所述内置空腔、通孔内壁之间填充有汲水垫,所述内置空腔内壁之间固定连接有储水盒,所述储水盒位于汲水垫左侧,所述储水盒靠近汲水垫的一端开凿有多个均匀分布的汲水槽,所述汲水槽内壁之间设有防水透气膜,所述防水透气膜外端贯穿有导水纤维,所述导水纤维与汲水垫之间固定连接,由于巡游器主体长时间在水底停滞或移动,海底的水流如发生渗透至人机交互系统内的现象时,因水流延内壁进行流动,所以致使水流在流动至汲水箱内壁时,水分被埋设在通孔和内置空腔内的汲水垫吸附起来,防止水分
流动至人机交互系统内底部,避免人机交互系统内电子元件受水分造成损坏的现象,而汲水垫在不断汲取水分后,透过导水纤维的作用下将水分传输至储水盒内储存起来,而防水透气膜在储水盒不断储存水分的过程中将水分隔离,避免水分再次流出,而水分在存储过程中,不断的受电子元件工作产生热量的影响作用下,逐渐被烘干转化为气态流失,从而利于下次渗水时的再次储水,后续工作人员可通过修复巡游器主体表面渗水处即可。
13.进一步的,所述巡游器主体整体框架采用不锈钢管材作为主结构支撑,所述透明玻璃采用有机玻璃材料制成,所述推进器的安装板采用abs工程塑料打印成形,通过设置巡游器主体整体框架采用不锈钢管材作为主结构支撑,可以保证机械自身的牢固性和安全性,另外,推进器安装板采用abs工程塑料,推进器布局可以满足巡游器主体在六个自由度的推进。
14.进一步的,所述防水机构包括控制箱内底端固定连接的防护盒,所述防护盒位于电路板的外侧,所述防护盒上端开凿有多个均匀分布的滤水孔,所述滤水孔内壁之间固定连接有汲水纤维层,所述防护盒外端嵌设有两个相互对称分布的导水管,所述防护盒靠近电路板的内壁嵌设有防潮层,所述防护盒内壁之间设有四个散热机构,当巡游器主体长时间在水底停滞或移动,海底的水流如发生渗透至人机交互系统内的现象并且汲水机构吸取水流速率过慢导致水流向电路板流动时,其电路板外侧的防护盒首先接触水流,在汲水纤维层吸水特性的作用下将水流通过滤水孔导流至防护盒内部,从而避免水流对电路板的侵蚀,而防潮层则防止水流长时间储存在防护盒内产生湿气使电路板受潮的现象。
15.进一步的,四个所述散热机构包括防护盒内壁之间固定连接的多个连接杆,多个所述连接杆相互靠近的一端固定连接有安装板,所述安装板外端固定连接有螺纹杆,所述螺纹杆外端套设有汲水膨胀机构,所述汲水膨胀机构与安装板相互接触,所述螺纹杆外端螺纹连接有螺纹套,所述螺纹套靠近汲水膨胀机构的一端固定连接有第一正极磁石,所述螺纹套上下两端均固定连接有扇叶,所述螺纹杆远离汲水膨胀机构的一端固定连接有限位挡板,所述螺纹套与限位挡板之间设有拉伸弹簧,所述拉伸弹簧套设于螺纹杆外侧,所述限位挡板内部嵌设有第二正极磁石,当水流进入防护盒内部后,在汲水膨胀机构吸水膨胀的作用下,汲水膨胀机构因水流的收集逐渐发生膨胀,致使对第一正极磁石产生相斥的力,将螺纹套向限位挡板一侧推动,并同时不断挤压拉伸弹簧,使拉伸弹簧受力压缩,而在螺纹套向限位挡板一侧螺纹旋转的同时带动着扇叶同步发生转动,致使扇叶对防护盒内部渗透的水流进行搅动,而螺纹套被汲水膨胀机构的相斥力推动至于螺纹杆中间位置时,因拉伸弹簧受力的弹性势能力的作用以及此时第一正极磁石与第二正极磁石呈水平面产生相斥力的作用下,此时右侧第一正极磁石与第二正极磁石之间的相斥力大于左侧汲水膨胀机构与第一正极磁石的相斥力,以致使带动着螺纹套向安装板一侧方向移动,当移动至第二正极磁石与第一正极磁石之间的相斥力减弱后,第一正极磁石与汲水膨胀机构之间的相斥力再次大于拉伸弹簧受力的弹性势能力和第一正极磁石与第二正极磁石之间结合的相斥力,促使螺纹套再次向限位挡板一侧移动,而在此移动过程中,扇叶进行多次往返运动,大大提高了防护盒内部水流的流动效率,同时降低电路板在运作时产生的热量,对电路板产生一定的散热作用。
16.进一步的,所述汲水膨胀机构包括安装板靠近螺纹杆一端固定连接的第三正极磁石,所述安装板外端滑动连接有多个相互对称的滑块,所述滑块外端固定连接有绝磁板,所
述绝磁板位于第三正极磁石外侧,所述螺纹杆贯穿于第三正极磁石内部,所述绝磁板相互靠近的内壁之间粘结有遇水膨胀橡胶止水条,当汲水膨胀机构接触防护盒内部的水流时,遇水膨胀橡胶止水条吸水开始产生膨胀,带动着两个绝磁板向相互远离的一侧移动,以致使第三正极磁石不在被绝磁板将磁性隔绝,使得第三正极磁石能够对第一正极磁石产生相斥力,推动螺纹套进行移动,而在巡游器主体运作结束返回地面后,工作人员在修复巡游器主体表面渗水处的同时将粘结于绝磁板内壁之间的遇水膨胀橡胶止水条进行更换。
17.3.有益效果
18.相比于现有技术,本发明的优点在于:
19.(1)本方案可以实现通过配备能使潜艇顺利上升下潜的推进器和实时监测珊瑚接受光照程度、水温、cod浓度的传感系统以及摄像头,对珊瑚环境进行检测监测,并查看珊瑚表面是否具有长棘海星,当观察至具有长棘海星时,夹持机构对长棘海星进行抓取,防止海星对珊瑚的伤害,避免了人工抓取长棘海星时所具备的危险因素。
20.(2)当巡游器主体潜至水底后,通过摄像头的观测实时向地面传输海底珊瑚影像,同时温度传感器、光照传感器、cod浓度传感器实时在线监测珊瑚临近海域光照、cod等环境因素,掌握珊瑚生长环境恶化趋势,以防止珊瑚生长环境数据超标,从而向地面进行预警。
21.(3)当巡游器主体潜至水底后,通过摄像头的观测,将所观测的数据传输至信息加工处理模块,随后信息加工处理模块向记录模块传输信息,从而将信息记录下来,而后记录模块将记录下来的数据传输至传输模块,而后传输模块将数据传输至地面,并且地面的操作人员可通过操作控制模块在水面上控制巡游器主体和监视水下环境。
22.(4)当巡游器主体潜至水底后,通过摄像头的观测,发现珊瑚表面具有长棘海星时,在驱动电机的电动驱动下,伸缩杆从套筒内部滑出,致使伸缩杆表面的卡齿槽与第一卡齿啮合转动,使得两个第一卡齿分别做出逆时针转动和顺时针转动,而此时第一卡齿同时带动着两个第二卡齿以及第三卡齿也发生逆时针转动和顺时针转动,从而在第三卡齿转动的作用下致使与之连接的机械抓夹向两侧开合,随后在机械抓夹位于长棘海星外侧时,驱动电机带动伸缩杆向套筒内部收缩,而第一卡齿、第二卡齿、第三卡齿开始向相反的方向转动,致使机械抓夹进行闭合,从而将长棘海星捕抓起来,大大避免了长棘海星对珊瑚生态系统的破坏。
23.(5)由于巡游器主体长时间在水底停滞或移动,海底的水流如发生渗透至人机交互系统内的现象时,因水流延内壁进行流动,所以致使水流在流动至汲水箱内壁时,水分被埋设在通孔和内置空腔内的汲水垫吸附起来,防止水分流动至人机交互系统内底部,避免人机交互系统内电子元件受水分造成损坏的现象,而汲水垫在不断汲取水分后,透过导水纤维的作用下将水分传输至储水盒内储存起来,而防水透气膜在储水盒不断储存水分的过程中将水分隔离,避免水分再次流出,而水分在存储过程中,不断的受电子元件工作产生热量的影响作用下,逐渐被烘干转化为气态流失,从而利于下次渗水时的再次储水,后续工作人员可通过修复巡游器主体表面渗水处即可。
24.(6)当巡游器主体长时间在水底停滞或移动,海底的水流如发生渗透至人机交互系统内的现象并且汲水机构吸取水流速率过慢导致水流向电路板流动时,其电路板外侧的防护盒首先接触水流,在汲水纤维层吸水特性的作用下将水流通过滤水孔导流至防护盒内部,从而避免水流对电路板的侵蚀,而防潮层则防止水流长时间储存在防护盒内产生湿气
使电路板受潮的现象。
25.(7)当水流聚集至防护盒内部时,在汲水膨胀机构吸水膨胀的作用下,汲水膨胀机构因水流的收集逐渐发生膨胀,致使对第一正极磁石产生相斥的力,将螺纹套向限位挡板一侧推动,并同时不断挤压拉伸弹簧,使拉伸弹簧受力压缩,而在螺纹套向限位挡板一侧螺纹旋转的同时带动着扇叶同步发生转动,致使扇叶对防护盒内部渗透的水流进行搅动,以致于促进防护盒内部水流的流动效率,同时降低电路板在运作时产生的热量,对电路板产生一定的散热作用。
附图说明
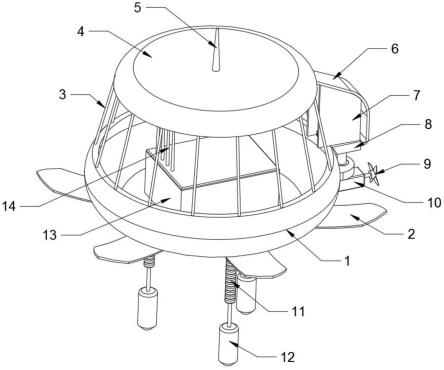
26.图1为本发明整体的结构示意图;
27.图2为本发明感应模块的放大结构示意图;
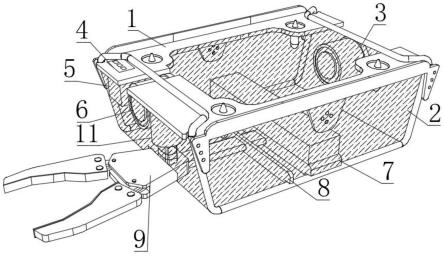
28.图3为本发明人机交互系统的结构示意图;
29.图4为本发明夹持机构的结构示意图;
30.图5为本发明汲水机构的结构示意图;
31.图6为本发明图5中a处的放大结构示意图;
32.图7为本发明防水机构的结构示意图;
33.图8为本发明防水机构俯视的结构示意图;
34.图9为本发明散热机构的结构示意图;
35.图10为本发明汲水膨胀机构的结构示意图。
36.图中标号说明:
37.1巡游器主体、2透明玻璃、3推进器、4感应模块、41温度传感器、42光照传感器、43cod浓度传感器、5人机交互系统、51控制箱、52控制模块、53信息加工处理模块、54记录模块、55传输模块、56电路板、6摄像头、7配重块、8限位板、9夹持机构、91套筒、92伸缩杆、93卡齿槽、94限位套、95第一卡齿、96第二卡齿、97转轴、98机械抓夹、99第三卡齿、10汲水机构、101汲水箱、102通孔、103内置空腔、104汲水垫、105储水盒、106汲水槽、107防水透气膜、108导水纤维、11驱动电机、12防水机构、121防护盒、122滤水孔、123汲水纤维层、124导水管、125防潮层、1210散热机构、1211连接杆、1212安装板、13汲水膨胀机构、1214螺纹杆、1215螺纹套、1216第一正极磁石、1217扇叶、1218限位挡板、1219拉伸弹簧、1220第二正极磁石、131第三正极磁石、132滑块、133绝磁板、134遇水膨胀橡胶止水条。
具体实施方式
38.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述;显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例,基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
39.在本发明的描述中,需要说明的是,术语“上”、“下”、“内”、“外”、“顶/底端”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本发明和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本发明的限制。此外,术语“第一”、“第二”仅用于描述目的,而不能理解
为指示或暗示相对重要性。
40.在本发明的描述中,需要说明的是,除非另有明确的规定和限定,术语“安装”、“设置有”、“套设/接”、“连接”等,应做广义理解,例如“连接”,可以是固定连接,也可以是可拆卸连接,或一体地连接;可以是机械连接,也可以是电连接;可以是直接相连,也可以通过中间媒介间接相连,可以是两个元件内部的连通。对于本领域的普通技术人员而言,可以具体情况理解上述术语在本发明中的具体含义。
41.实施例:
42.请参阅图1-4,一种珊瑚生态健康监测的巡游潜艇,包括巡游器主体1,巡游器主体1内壁之间嵌设有透明玻璃2,巡游器主体1内壁安装有推进器3,巡游器主体1上端安装有感应模块4,巡游器主体1远离推进器3一侧的内壁设有人机交互系统5,巡游器主体1远离推进器3一侧的内壁安装有摄像头6,摄像头6位于人机交互系统5的右侧,巡游器主体1内底端固定连接有配重块7,巡游器主体1内底端固定连接有限位板8,限位板8位于配重块7的前侧,配重块7外端安装有夹持机构9,巡游器主体1内顶端安装有驱动电机11,驱动电机11与夹持机构9之间电性连接,本方案可以实现通过配备能使潜艇顺利上升下潜的推进器和实时监测珊瑚接受光照程度、水温、cod浓度的传感系统以及摄像头,对珊瑚环境进行检测监测,并查看珊瑚表面是否具有长棘海星,当观察至具有长棘海星时,夹持机构对长棘海星进行抓取,防止海星对珊瑚的伤害,避免了人工抓取长棘海星时所具备的危险因素。
43.请参阅图1-2,感应模块4包括巡游器主体1上端安装的温度传感器41,温度传感器41外端电性连接有光照传感器42,光照传感器42外端电性连接有cod浓度传感器43,当巡游器主体1潜至水底后,通过摄像头6的观测实时向地面传输海底珊瑚影像,同时温度传感器41、光照传感器42、cod浓度传感器43实时在线监测珊瑚临近海域光照、cod等环境因素,掌握珊瑚生长环境恶化趋势,以防止珊瑚生长环境数据超标,从而向地面进行预警。
44.请参阅图1和图3,人机交互系统5包括巡游器主体1远离推进器3一侧内壁固定连接的控制箱51,控制箱51内底端安装有电路板56,电路板56上端安装有控制模块52,控制模块52外端电性连接有信息加工处理模块53,信息加工处理模块53外端电性连接有记录模块54,记录模块54外端电性连接有传输模块55,传输模块55与感应模块4、摄像头6之间均电性连接,控制箱51内壁嵌设有汲水机构10,控制箱51内底端设有防水机构12,防水机构12位于电路板56外端,当巡游器主体1潜至水底后,通过摄像头6的观测,将所观测的数据传输至信息加工处理模块53,随后信息加工处理模块53向记录模块54传输信息,从而将信息记录下来,而后记录模块54将记录下来的数据传输至传输模块55,而后传输模块55将数据传输至地面,并且地面的操作人员可通过操作控制模块52在水面上控制巡游器主体1和监视水下环境。
45.请参阅图1和图4,夹持机构9包括配重块7前端固定连接的套筒91,套筒91内壁之间滑动连接有伸缩杆92,伸缩杆92左右两端均开凿有多个均匀分布的卡齿槽93,伸缩杆92外端套设有限位套94,限位套94内底端安装有第一卡齿95,第一卡齿95位于伸缩杆92左右两侧对称分布,且与卡齿槽93啮合连接,第一卡齿95外端啮合连接有第二卡齿96,第二卡齿96关于伸缩杆92左右对称分布,限位套94内底端转动连接有两个相互对称的转轴97,转轴97外端固定连接有机械抓夹98,转轴97外端固定连接有第三卡齿99,第三卡齿99位于机械抓夹98内壁之间,且与第二卡齿96啮合连接,当巡游器主体1潜至水底后,通过摄像头6的观
测,发现珊瑚表面具有长棘海星时,在驱动电机11的电动驱动下,伸缩杆92从套筒91内部滑出,致使伸缩杆92表面的卡齿槽93与第一卡齿95啮合转动,使得两个第一卡齿95分别做出逆时针转动和顺时针转动,而此时第一卡齿95同时带动着两个第二卡齿96以及第三卡齿99也发生逆时针转动和顺时针转动,从而在第三卡齿99转动的作用下致使与之连接的机械抓夹98向两侧开合,随后在机械抓夹98位于长棘海星外侧时,驱动电机11带动伸缩杆92向套筒91内部收缩,而第一卡齿95、第二卡齿96、第三卡齿99开始向相反的方向转动,致使机械抓夹98进行闭合,从而将长棘海星捕抓起来,大大避免了长棘海星对珊瑚生态系统的破坏。
46.请参阅图3和图5-6,汲水机构10包括控制箱51四个内壁嵌设的汲水箱101,汲水箱101靠近传输模块55的一端开凿有多个均匀分布的通孔102,汲水箱101内部开凿有内置空腔103,内置空腔103与通孔102相互连通,内置空腔103、通孔102内壁之间填充有汲水垫104,内置空腔103内壁之间固定连接有储水盒105,储水盒105位于汲水垫104左侧,储水盒105靠近汲水垫104的一端开凿有多个均匀分布的汲水槽106,汲水槽106内壁之间设有防水透气膜107,防水透气膜107外端贯穿有导水纤维108,导水纤维108与汲水垫104之间固定连接,由于巡游器主体1长时间在水底停滞或移动,海底的水流如发生渗透至人机交互系统5内的现象时,因水流延内壁进行流动,所以致使水流在流动至汲水箱101内壁时,水分被埋设在通孔102和内置空腔103内的汲水垫104吸附起来,防止水分流动至人机交互系统5内底部,避免人机交互系统5内电子元件受水分造成损坏的现象,而汲水垫104在不断汲取水分后,透过导水纤维108的作用下将水分传输至储水盒105内储存起来,而防水透气膜107在储水盒105不断储存水分的过程中将水分隔离,避免水分再次流出,而水分在存储过程中,不断的受电子元件工作产生热量的影响作用下,逐渐被烘干转化为气态流失,从而利于下次渗水时的再次储水,后续工作人员可通过修复巡游器主体1表面渗水处即可。
47.请参阅图1,巡游器主体1整体框架采用不锈钢管材作为主结构支撑,透明玻璃2采用有机玻璃材料制成,推进器3的安装板采用abs工程塑料打印成形,通过设置巡游器主体1整体框架采用不锈钢管材作为主结构支撑,可以保证机械自身的牢固性和安全性,另外,推进器3安装板采用abs工程塑料,推进器3布局可以满足巡游器主体1在六个自由度的推进。
48.请参阅图3和图7-8,防水机构12包括控制箱51内底端固定连接的防护盒121,防护盒121位于电路板56的外侧,防护盒121上端开凿有多个均匀分布的滤水孔122,滤水孔122内壁之间固定连接有汲水纤维层123,防护盒121外端嵌设有两个相互对称分布的导水管124,防护盒121靠近电路板56的内壁嵌设有防潮层125,防护盒121内壁之间设有四个散热机构1210,当巡游器主体长时间在水底停滞或移动,海底的水流如发生渗透至人机交互系统内的现象并且汲水机构吸取水流速率过慢导致水流向电路板56流动时,其电路板56外侧的防护盒121首先接触水流,在汲水纤维层123吸水特性的作用下将水流通过滤水孔122导流至防护盒121内部,从而避免水流对电路板56的侵蚀,而防潮层125则防止水流长时间储存在防护盒121内产生湿气使电路板56受潮的现象。
49.请参阅图8-9,四个散热机构1210包括防护盒121内壁之间固定连接的多个连接杆1211,多个连接杆1211相互靠近的一端固定连接有安装板1212,安装板1212外端固定连接有螺纹杆1214,螺纹杆1214外端套设有汲水膨胀机构13,汲水膨胀机构13与安装板1212相互接触,螺纹杆1214外端螺纹连接有螺纹套1215,螺纹套1215靠近汲水膨胀机构13的一端固定连接有第一正极磁石1216,螺纹套1215上下两端均固定连接有扇叶1217,螺纹杆1214
远离汲水膨胀机构13的一端固定连接有限位挡板1218,螺纹套1215与限位挡板1218之间设有拉伸弹簧1219,拉伸弹簧1219套设于螺纹杆1214外侧,限位挡板1218内部嵌设有第二正极磁石1220,当水流进入防护盒121内部后,在汲水膨胀机构13吸水膨胀的作用下,汲水膨胀机构13因水流的收集逐渐发生膨胀,致使对第一正极磁石1216产生相斥的力,将螺纹套1215向限位挡板1218一侧推动,并同时不断挤压拉伸弹簧1219,使拉伸弹簧1219受力压缩,而在螺纹套1215向限位挡板1218一侧螺纹旋转的同时带动着扇叶1217同步发生转动,致使扇叶1217对防护盒121内部渗透的水流进行搅动,而螺纹套1215被汲水膨胀机构13的相斥力推动至于螺纹杆1214中间位置时,因拉伸弹簧1219受力的弹性势能力的作用以及此时第一正极磁石1216与第二正极磁石1220呈水平面产生相斥力的作用下,此时右侧第一正极磁石1216与第二正极磁石1220之间的相斥力大于左侧汲水膨胀机构13与第一正极磁石1216的相斥力,以致使带动着螺纹套1215向安装板1212一侧方向移动,当移动至第二正极磁石1220与第一正极磁石1216之间的相斥力减弱后,第一正极磁石1216与汲水膨胀机构13之间的相斥力再次大于拉伸弹簧1219受力的弹性势能力和第一正极磁石1216与第二正极磁石1220之间结合的相斥力,促使螺纹套1215再次向限位挡板1218一侧移动,而在此移动过程中,扇叶1217进行多次往返运动,大大提高了防护盒121内部水流的流动效率,同时降低电路板56在运作时产生的热量,对电路板56产生一定的散热作用。
50.请参阅9-10,汲水膨胀机构13包括安装板1212靠近螺纹杆1214一端固定连接的第三正极磁石131,安装板1212外端滑动连接有多个相互对称的滑块132,滑块132外端固定连接有绝磁板133,绝磁板133位于第三正极磁石131外侧,螺纹杆1214贯穿于第三正极磁石131内部,绝磁板133相互靠近的内壁之间粘结有遇水膨胀橡胶止水条134,当汲水膨胀机构13接触防护盒121内部的水流时,遇水膨胀橡胶止水条134吸水开始产生膨胀,带动着两个绝磁板133向相互远离的一侧移动,以致使第三正极磁石131不在被绝磁板133将磁性隔绝,使得第三正极磁石131能够对第一正极磁石1216产生相斥力,推动螺纹套1215进行移动,而在巡游器主体运作结束返回地面后,工作人员在修复巡游器主体表面渗水处的同时将粘结于绝磁板133内壁之间的遇水膨胀橡胶止水条134进行更换。
51.本发明中,当巡游器主体1潜入至海底中时,通过摄像头6的观测实时向地面传输海底珊瑚影像,并将所观测的数据传输至信息加工处理模块53,随后信息加工处理模块53向记录模块54传输信息,从而将信息记录下来,而后记录模块54将记录下来的数据传输至传输模块55,而后传输模块55将数据传输至地面,并且地面的操作人员可通过操作控制模块52在水面上控制巡游器主体1和监视水下环境,同时温度传感器41、光照传感器42、cod浓度传感器43实时在线监测珊瑚临近海域光照、cod等环境因素,掌握珊瑚生长环境恶化趋势,以防止珊瑚生长环境数据超标,从而向地面进行预警,而在通过摄像头6的观测,发现珊瑚表面具有长棘海星时,驱动电机11通过电动驱动,致使伸缩杆92从套筒91内部滑出,致使伸缩杆92表面的卡齿槽93与第一卡齿95啮合转动,使得两个第一卡齿95分别做出逆时针转动和顺时针转动,而此时第一卡齿95同时带动着两个第二卡齿96以及第三卡齿99也发生逆时针转动和顺时针转动,从而在第三卡齿99转动的作用下致使与之连接的机械抓夹98向两侧开合,随后在机械抓夹98位于长棘海星外侧时,驱动电机11带动伸缩杆92向套筒91内部收缩,而第一卡齿95、第二卡齿96、第三卡齿99开始向相反的方向转动,致使机械抓夹98进行闭合,从而将长棘海星捕抓起来,大大避免了长棘海星对珊瑚生态系统的破坏,如由于巡
游器主体1长时间在水底停滞或移动,海底的水流如发生渗透至人机交互系统5内的现象时,因水流延内壁进行流动,所以致使水流在流动至汲水箱101内壁,水分被埋设在通孔102和内置空腔103内的汲水垫104吸附起来,防止水分流动至人机交互系统5内底部,避免人机交互系统5内电子元件受水分造成损坏的现象,而汲水垫104在不断汲取水分后,透过导水纤维108的作用下将水分传输至储水盒105内储存起来,而防水透气膜107在储水盒105不断储存水分的过程中将水分隔离,避免水分再次流出,而水分在存储过程中,不断的受电子元件工作产生热量的影响作用下,逐渐被烘干转化为气态流失,从而利于下次渗水时的再次储水,后续工作人员可通过修复巡游器主体1表面渗水处即可,同时当巡游器主体长时间在水底停滞或移动,海底的水流如发生渗透至人机交互系统内的现象并且汲水机构吸取水流速率过慢导致水流向电路板56流动时,水流聚集至防护盒121内部,在汲水膨胀机构13吸水膨胀的作用下,汲水膨胀机构13因水流的收集逐渐发生膨胀,致使对第一正极磁石1216产生相斥的力,将螺纹套1215向限位挡板1218一侧推动,并同时不断挤压拉伸弹簧1219,使拉伸弹簧1219受力压缩,而在螺纹套1215向限位挡板1218一侧螺纹旋转的同时带动着扇叶1217同步发生转动,致使扇叶1217对防护盒121内部渗透的水流进行搅动,以致于促进防护盒121内部水流的流动效率,同时降低电路板56在运作时产生的热量,对电路板56产生一定的散热作用,致使本装置通过更加灵活的水下运动、便捷迅速的信息传输及对珊瑚天敌部分海星的防治等功能来为珊瑚提供更有效的全面保护,加强对珊瑚生态系统的保护,与现有技术相比,本发明可以实现通过配备能使潜艇顺利上升下潜的推进器和实时监测珊瑚接受光照程度、水温、cod浓度的传感系统以及摄像头,对珊瑚环境进行检测监测,并查看珊瑚表面是否具有长棘海星,当观察至具有长棘海星时,夹持机构对长棘海星进行抓取,防止海星对珊瑚的伤害,避免了人工抓取长棘海星时所具备的危险因素。
52.以上所述,仅为本发明较佳的具体实施方式;但本发明的保护范围并不局限于此。任何熟悉本技术领域的技术人员在本发明揭露的技术范围内,根据本发明的技术方案及其改进构思加以等同替换或改变,都应涵盖在本发明的保护范围内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。