1.本发明涉及一种控制与车轮连结的行驶用马达的车辆用控制装置。
背景技术:
2.在电动汽车或混合动力车辆等车辆设置有与车轮连结的行驶用马达。由此,基于驾驶员的油门操作和/或制动器操作来控制设置于车辆的行驶用马达(参照专利文献1~4)。
3.现有技术文献
4.专利文献
5.专利文献1:日本特开2004-136731号公报
6.专利文献2:日本特开2006-175941号公报
7.专利文献3:日本特开2017-85846号公报
8.专利文献4:日本特开2006-137324号公报
技术实现要素:
9.技术问题
10.然而,由于行驶用马达的响应速度极快,因此为了抑制加速冲击和/或减速冲击等,通过对目标扭矩实施平滑处理等从而使马达扭矩缓慢地变化。但是,利用平滑处理等使马达扭矩缓慢地变化的情况是在被其他车辆追尾的车辆追尾时导致难以进行行驶用马达的控制的主要原因。
11.本发明的目的在于,在车辆追尾时适当地控制行驶用马达。
12.技术方案
13.本发明的车辆用控制装置控制与车轮连结的行驶用马达,所述车辆用控制装置具有:扭矩设定部,其设定基于驾驶员的油门操作而变化的第一目标扭矩、以及比所述第一目标扭矩更缓慢地变化的第二目标扭矩来作为所述行驶用马达的目标扭矩;以及马达控制部,其基于所述第一目标扭矩或所述第二目标扭矩来控制所述行驶用马达,所述扭矩设定部在不进行油门操作的前进行驶时,将所述第一目标扭矩和所述第二目标扭矩设定于再生侧,所述马达控制部在停车中的车辆在不进行油门操作的状态下已前进的情况下,基于所述第一目标扭矩来控制所述行驶用马达。
14.技术效果
15.根据本发明,马达控制部在停车中的车辆在不进行油门操作的状态下已前进的情况下,基于第一目标扭矩来控制行驶用马达。由此,能够在车辆追尾时适当地控制行驶用马达。
附图说明
16.图1是示出具备作为本发明的一个实施方式的车辆用控制装置的车辆的构成例的
图。
17.图2是示出表示请求扭矩的扭矩映射的一例的图。
18.图3是示出控制扭矩的设定状况的一例的图。
19.图4的(a)~图4的(c)是示出其他车辆对停止的本车辆追尾的追尾状况的一例的图。
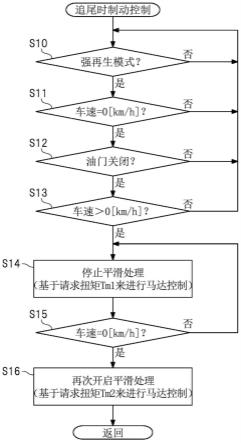
20.图5是示出追尾时制动控制的执行顺序的一例的流程图。
21.图6是示出追尾时制动控制的执行状况的一例的时序图。
22.符号说明
23.10车辆用控制装置
24.11车辆
25.12车轮
26.13电动发电机(行驶用马达)
27.31马达控制器(马达控制部)
28.36扭矩设定部
29.tm1请求扭矩(第一目标扭矩)
30.tm2控制扭矩(第二目标扭矩)
具体实施方式
31.以下,基于附图,对本发明的实施方式进行详细说明。
32.[车辆构成]
[0033]
图1是示出作为本发明的一个实施方式的具备车辆用控制装置10的车辆11的构成例的图。如图1所示,在车辆11设置有与车轮12连结的电动发电机(行驶用马达)13。在该电动发电机13的转子14经由齿轮列15、马达输出轴16、差速器机构17以及车轮驱动轴18而连结有车轮12。另外,在电动发电机13的定子19连接有变换器20,在变换器20连接有锂离子电池等电池21。
[0034]
在车辆用控制装置10设置有由处理器和存储器等构成的主控制器30、以及由处理器和存储器等构成的马达控制器(马达控制部)31。另外,作为与主控制器30连接的各种传感器,有检测油门踏板22的踩踏量(以下,记载为油门开度acc。)的加速传感器32、检测制动踏板23的踩踏量的制动传感器33、以及检测作为车辆11的行驶速度的车速v的车速传感器34。此外,在主控制器30连接有在设定再生模式(弱再生模式、强再生模式)时被操作的模式开关35。
[0035]
主控制器30具有设定请求扭矩tm1和控制扭矩tm2的扭矩设定部36。如后所述,请求扭矩(第一目标扭矩)tm1是指基于油门开度acc等而被设定的电动发电机13的目标扭矩。另外,控制扭矩(第二目标扭矩)tm2是通过对请求扭矩tm1实施平滑处理而被设定的目标扭矩。由于该控制扭矩tm2是对请求扭矩tm1实施了平滑处理而得的目标扭矩,所以成为比请求扭矩tm1更缓慢地变化的目标扭矩。
[0036]
另外,主控制器30向马达控制器31发送控制扭矩tm2,马达控制器31基于控制扭矩tm2而生成变换器20的驱动信号。此外,基于驱动信号而被控制的变换器20将电池21的直流电力转换为交流电力而向电动发电机13供给,为控制扭矩tm2而控制电动发电机13。由此,
电动发电机13除后述的追尾时制动控制以外,都基于控制扭矩tm2而被控制。应予说明,主控制器30与马达控制器31经由can等车载网络37而彼此通信自如地连接。
[0037]
[请求扭矩tm1的设定]
[0038]
主控制器30的扭矩设定部36基于车速v、油门开度acc以及再生模式信息来设定针对电动发电机13的请求扭矩tm1。图2是示出表示请求扭矩tm1的扭矩映射的一例的图。如图2所示,在扭矩映射中设定有按照油门开度acc来表示请求扭矩tm1的特性线l0~l4。即,在油门开度acc为0%的情况下,沿特性线l0、l1而设定请求扭矩tm1,在油门开度acc为25%的情况下,沿特性线l2而设定请求扭矩tm1。同样地,在油门开度acc为50%的情况下,沿特性线l3而设定请求扭矩tm1,在油门开度acc为100%的情况下,沿特性线l4而设定请求扭矩tm1。例如,在油门开度acc为“50%”且车速为“vx”的情况下,设定“tx”作为请求扭矩tm1。
[0039]
作为在解除了油门操作的滑行行驶时所使用的再生模式,图示的车辆11具有以弱的再生扭矩来控制电动发电机13的弱再生模式、以及以强的再生扭矩来控制电动发电机13的强再生模式。因此,作为在油门开度acc为0%的情况下选择的特性线,在扭矩映射中设置有在再生模式为弱再生模式的情况下所选择的特性线l1、以及在再生模式为强再生模式的情况下所选择的特性线l0。即,在选择了弱再生模式的滑行行驶时,沿特性线l1而设定请求扭矩tm1,在选择了强再生模式的滑行行驶时,沿特性线l0而设定请求扭矩tm1。由此,如图2中特性线l0、l1所示,在滑行行驶时即不进行油门操作的前进行驶时,请求扭矩tm1被设定在再生侧。
[0040]
应予说明,虽然从便于说明的观点而在图2所示的扭矩映射示出五条特性线l0~l4,但是不限于此,当然也可以在扭矩映射设定六条以上的特性线。
[0041]
[控制扭矩tm2的设定]
[0042]
接下来,对由主控制器30的扭矩设定部36进行的控制扭矩tm2的设定状况进行说明。由于电动发电机13的响应速度极其快,所以导致在基于请求扭矩tm1控制电动发电机13的情况下,有时会给驾驶员带来加速冲击或减速冲击。因此,主控制器30的扭矩设定部36通过对请求扭矩tm1实施平滑处理而设定控制扭矩tm2。然后,从主控制器30接收了控制扭矩tm2的马达控制器31基于控制扭矩tm2,经由变换器20而控制电动发电机13。由此,在通过油门操作而使车辆11行驶的情况下,利用控制扭矩tm2来执行马达控制。由此,能够在不给驾驶员带来不适感的情况下使马达扭矩增减。
[0043]
图3是示出控制扭矩tm2的设定状况的一例的图。如图3中期间ta所示,若通过驾驶员的油门操作而使油门开度acc增加(符号a1),则请求扭矩tm1与油门开度acc联动而从再生侧向动力运行侧变化(符号b1)。然后,控制电动发电机13的控制扭矩tm2以模仿请求扭矩tm1的方式慢慢地向动力运行侧变化(符号c1)。在此,设定预定的限制值s1作为控制扭矩tm2的变化速度限制值(符号d1)。即,相对于请求扭矩tm1的控制扭矩tm2以其变化速度不超过限制值s1的方式被限制。
[0044]
另外,若朝向零变化的控制扭矩tm2到达至零附近的预定范围α(符号c2),则控制扭矩tm2的变化速度限制值从“s1”下降到“s2”(符号c2)。然后,通过零的控制扭矩tm2以其变化速度不超过限制值s2的方式被限制。即,在控制扭矩tm2通过零时,控制扭矩tm2的变化速度比即将通过预定范围α时的变化速度小。
[0045]
由此,在控制扭矩tm2通过零的时刻,即在齿轮列15和/或差速器机构17等的啮合
齿轮面切换的时刻,能够使控制扭矩tm2缓慢地变化(符号c3),并且能够抑制马达扭矩从再生侧切换到动力运行侧时的冲击。其后,若通过了零的控制扭矩tm2从零附近的预定范围α离开(符号c4),则控制扭矩tm2的变化速度限制值再次上升为“s1”(符号d3)。然后,控制电动发电机13的控制扭矩tm2以模仿请求扭矩tm1的方式慢慢地变化(符号c5)。
[0046]
如图3中期间tb所示,若通过驾驶员的油门操作解除而使油门开度acc减少(符号a2),则请求扭矩tm1与油门开度acc联动而从动力运行侧向再生侧变化(符号b2)。然后,控制电动发电机13的控制扭矩tm2以模仿请求扭矩tm1的方式向再生侧慢慢地变化(符号c6)。在此,设定预定的限制值s1作为控制扭矩tm2的变化速度限制值(符号d4)。即,相对于请求扭矩tm1的控制扭矩tm2以其变化速度不超过限制值s1的方式被限制。
[0047]
另外,若朝向零变化的控制扭矩tm2到达至零附近的预定范围α(符号c7),则控制扭矩tm2的变化速度限制值从“s1”下降到“s2”(符号d5)。然后,通过零的控制扭矩tm2以其变化速度不超过限制值s2的方式被限制。即,在控制扭矩tm2通过零时,控制扭矩tm2的变化速度比即将通过预定范围α时的变化速度小。
[0048]
由此,在控制扭矩tm2通过零的时刻,即在齿轮列15和/或差速器机构17等的啮合齿轮面切换的时刻,能够使控制扭矩tm2缓慢地变化(符号c8),并且能够抑制马达扭矩从再生侧切换到动力运行侧时的冲击。其后,若通过了零的控制扭矩tm2从零附近的预定范围α离开(符号c9),则控制扭矩tm2的变化速度限制值再次上升为“s1”(符号d6)。然后,控制电动发电机13的控制扭矩tm2以模仿请求扭矩tm1的方式慢慢地变化(符号c10)。
[0049]
[追尾时制动控制]
[0050]
图4的(a)~图4的(c)是示出其他车辆100对停止的本车辆11追尾的追尾状况的一例的图。如图4的(a)和图4的(b)所示,若其他车辆100从后方对停车的本车辆11追尾,则如图4(c)所示,本车辆11被向前方撞出。从避免撞击的冲击等的观点来看,谋求在该车辆追尾时,使本车辆11的伴随着追尾的移动距离dx变短。因此,本实施方式的车辆用控制装置10通过执行以下的追尾时制动控制而使车辆追尾时的本车辆11的移动距离dx变短。
[0051]
<流程图>
[0052]
图5是示出追尾时制动控制的执行顺序的一例的流程图。如图5所示,在步骤s10中,判定是否设定了强再生模式作为滑行行驶时的再生模式。应予说明,由于在也被称为单踏板模式的强再生模式中,在滑行行驶时产生较大的再生扭矩,所以能够在不踩踏制动踏板23的情况下使车辆11停止。即,在执行强再生模式的情况下,假想有在驾驶员不进行制动器操作的情况下使车辆11停止的情况。
[0053]
在步骤10中,在判定为是强再生模式的情况下进入步骤s11,判定车速是否为0[km/h]。另外,在步骤s11中,在判定为车速是0[km/h]的情况下,进入步骤s12,判定是否处于不进行油门操作的状态。在步骤12中,在判定为处于不进行油门操作的状态的情况下,进入步骤s13,判定车速是否超过0[km/h]。
[0054]
在步骤s13中,判定为车速超过0[km/h]的状况是指设定了强再生模式,并且停车中的车辆11在不进行油门操作的状态下前进的状况。即,在步骤s13中,判定为车速超过0[km/h]的状况是指,如图4的(c)所示那样,假想为处于本车辆11因车辆追尾而被撞出的状况。在该情况下,进入步骤s14,停止请求扭矩tm1的平滑处理,基于请求扭矩tm1来控制电动发电机13。由此,能够使电动发电机13的再生扭矩迅速提升,如图4的(c)中箭头β所示,能够
通过传递到车轮12的再生扭矩对车辆11进行制动。
[0055]
由此,若通过再生扭矩对车辆11进行制动,则在接下来的步骤s15中,判定车速是否为0[km/h]。在步骤s15中,在判定为车速超过0[km/h]的情况下,因车辆追尾而继续进行前进移动,因此返回步骤s14,继续使针对请求扭矩tm1的平滑处理停止,并且基于请求扭矩tm1来控制电动发电机13。另一方面,在步骤s15中,在判定为车速是0[km/h]的情况下,停止因车辆追尾而进行的前进移动,因此进入步骤s16,再次进行请求扭矩tm1的平滑处理,并且基于控制扭矩tm2来控制电动发电机13。
[0056]
<时序图>
[0057]
图6是示出追尾时制动控制的执行状况的一例的时序图。应予说明,在图6中,油门踏板22的“关闭”是指不进行基于驾驶员的油门操作的状况,油门踏板22的“开启”是指正在由驾驶员进行油门操作的状况。另外,制动踏板23的“关闭”是指不进行基于驾驶员的制动器操作的状况,制动踏板23的“开启”是指正在由驾驶员进行制动器操作的状况。
[0058]
如图6所示,在时刻t1,因解除油门操作而减速的车辆11停止(符号a1)。应予说明,在图6所示的例子中,由于执行了强再生模式,所以车辆11在不进行制动器操作的情况下停止。接着,如时刻t2所示,若随着其他车辆100的追尾而使车速增加,则针对电动发电机13的请求扭矩tm1被设定在再生侧。即,如图2中箭头xa所示,在停车中的车辆11在不进行油门操作的状态下已前进的情况下,如箭头xb所示,请求扭矩tm1被设定在再生侧。
[0059]
另外,在时刻t2,由于停车中的车辆11在不进行油门操作的状态下开始前进,所以如上所述,取消针对请求扭矩tm1的平滑处理,并且基于请求扭矩tm1来执行电动发电机13的再生控制。由此,能够快速地提升作为电动发电机13的实际扭矩的再生扭矩(符号b1),因此能够使被追尾的车辆11的前进移动快速地停止(时刻t3,符号a2)。
[0060]
对此,如作为比较例而示出那样,在即使在车辆追尾时也基于控制扭矩tm2而执行了电动发电机13的再生控制的情况下,控制扭矩tm2即电动发电机13的再生扭矩缓慢地提升(符号c1),因此,被追尾的车辆11的前进移动缓慢地停止(时刻t4,符号d1)。特别地,在对请求扭矩tm1实施平滑处理时,控制扭矩tm2的变化速度在零附近明显地被限制(符号c2),因此,控制扭矩tm2即再生扭矩的提升被延迟。
[0061]
[总结]
[0062]
如到此为止所说明的那样,本实施方式的车辆用控制装置10在停车中的车辆在不进行油门操作的状态下已前进的情况下,基于请求扭矩tm1来控制电动发电机13。由此,能够快速地提升电动发电机13的再生扭矩,并且能够使因追尾而前进的车辆11快速地停止。另外,本实施方式的车辆用控制装置10在通过执行油门操作而使停车中的车辆11前进的情况下,基于控制扭矩tm2来控制电动发电机13。由此,能够使马达扭矩缓慢地变化,并且能够在不给驾驶员带来不适感的情况下使车辆11行驶。
[0063]
在图5所示的例子中,在选择了强再生模式的状态下因车辆追尾而使停止中的车辆11前进的情况下,基于请求扭矩tm1来控制电动发电机13,但是不限于此。例如,也可以在选择了弱再生模式的状态下因车辆追尾而使停止中的车辆前进的情况下,基于请求扭矩tm1来控制电动发电机13。另外,在图6所示的例子中,在不进行基于驾驶员的制动器操作的状态下因车辆追尾而使停止中的车辆前进的情况下,基于请求扭矩tm1来控制电动发电机13,但是不限于此。例如,也可以在进行了基于驾驶员的制动器操作的状态下因车辆追尾而
使停止中的车辆前进的情况下,基于请求扭矩tm1来控制电动发电机13。此外,也可以在未图示的电动制动器等动作的状态下因车辆追尾而使停止中的车辆前进的情况下,基于请求扭矩tm1来控制电动发电机13。
[0064]
本发明并不限于上述实施方式,当然在不脱离其主旨的范围内能够进行各种变化。在上述说明中,虽然示例出仅具备行驶用马达作为动力源的电动汽车作为使用了车辆用控制装置10的车辆11,但是不限于此,也可以是具备行驶用马达和发动机作为动力源的混合动力车辆。另外,在上述说明中,虽然使主控制器30作为扭矩设定部而起作用,并且使马达控制器31作为马达控制部而起作用,但是不限于此,也可以使其他的控制器作为扭矩设定部和/或马达控制部而起作用。另外,在上述说明中,虽然在对请求扭矩tm1实施平滑处理而设定控制扭矩tm2时,通过限制变化速度而设定缓慢地变化的控制扭矩tm2,但是不限于此,也可以利用其他方法来设定扭矩tm2。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。
