技术特征:
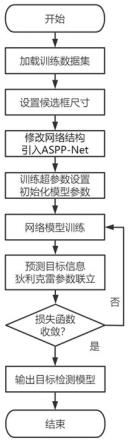
1.一种融合主观逻辑和不确定性分布建模的可信目标检测方法,其特征在于,包括如下步骤:步骤1,采集图像数据,对所述图像数据进行预处理,对预处理后的图像进行目标标注,构建第一数据集;步骤2,构建可信目标检测模型;步骤3,训练所述可信目标检测模型,获得训练后的可信目标检测模型;步骤4,将第一数据集中的测试图像输入训练后的可信目标检测模型,获得图像中各个目标定位信息、目标类别识别结果和目标类别识别结果的整体可信度评估结果。2.根据权利要求1所述的一种融合主观逻辑和不确定性分布建模的可信目标检测方法,其特征在于,步骤2中所述可信目标检测模型包括aspp-yolov5目标检测模型,并在aspp-yolov5目标检测模型的输出层融入主观逻辑和狄利克雷分布,完成不确定性分布建模。3.根据权利要求2所述的一种融合主观逻辑和不确定性分布建模的可信目标检测方法,其特征在于,步骤2中所述aspp-yolov5目标检测模型依次包括yolov5目标检测模型中的骨干网络、aspp网络和yolov5目标检测模型中的融合网络,第一数据集中的训练图像输入骨干网络,骨干网络输出训练图像的第一特征图像;第一特征图像输入aspp网络,aspp网络输出训练图像的第二特征图像;第二特征图像输入融合网络,融合网络输出维数为s
×
s
×
(b*(5 k))的特征向量,其中s表示将aspp-yolov5目标检测模型的输入图像分割为s
×
s的网格,b表示一个网格中预测框的数量,k表示目标类别的数量;每个预测框包括预测框边界信息、预测框包含物体的概率和对目标类别的预测结果,所述预测框边界信息包括4位:预测框的中心点坐标x和y、该预测框的宽度w和高度h;所述预测框包含物体的概率pr(object)占1位;对目标类别的预测结果包括k位,即各类别在预测框置信度c下的条件概率pr(class
k
|c),k表示目标类别索引,1 ≤ k ≤k;预测框置信度, 表示目标预测框与标注框的交并比;计算各类别概率。4.根据权利要求3所述的一种融合主观逻辑和不确定性分布建模的可信目标检测方法,其特征在于,步骤2中在aspp-yolov5目标检测模型的输出层融入主观逻辑和狄利克雷分布,包括将由维数为s
×
s
×
(b*(5 k))的特征向量计算得到的每个预测框中各类别概率pr(class
k
)作为主观证据e
k
,并与狄利克雷参数联立,获得狄利克雷参数α
k
、各类别的信念质量b
k
和整体的不确定质量u,各参数表达式为:α
k = e
k 1b
k = (α
k
ꢀ‑ꢀ
1) / s
dirichlet
u = k / s
dirichlet
上述表达式中,s
dirichlet
为狄利克雷强度,s
dirichlet
数值大小为狄利克雷参数α
k
的和,同时各类别的信念质量b
k
和整体的不确定质量u非负,且和为1,表示为 。5.根据权利要求4所述的一种融合主观逻辑和不确定性分布建模的可信目标检测方
法,其特征在于,步骤2中aspp网络包括5个网络层和1个由拼接层与卷积核大小1*1的卷积层所构建的网络,所述5个网络层分别为卷积核大小1*1的卷积网络、3个卷积核大小3*3,膨胀率分别为1、3、5的空洞卷积网络以及一个全局平均池化层,第一特征图像分别经过所述5个网络层,将所述5个网络层的输出结果拼接后,再经过一个卷积核大小1*1的卷积网络,输出第二特征图像;aspp-yolov5目标检测模型包括三个尺度层面的网格图,三个层面的网格图分别用于预测大目标、中等目标和小目标,每个网格包含b个不同大小的预测框用于预测不同长宽比的目标;预先设定的各个预测框尺寸采用k-means聚类算法,以第一数据集中目标边界框和聚类中心预测边界框的重合度作为聚类距离基准,选取3*b个聚类中心的目标边界框尺寸。6.根据权利要求5所述的一种融合主观逻辑和不确定性分布建模的可信目标检测方法,其特征在于,步骤3中训练所述可信目标检测模型包括:步骤3-1,采用迁移学习算法,使用imagenet数据集中和所述第一数据集中目标类别一致的图像数据,对aspp-yolov5目标检测模型骨干网络所构成的分类模型进行训练,获得初始化模型参数;步骤3-2,将所述初始化模型参数作为所述可信目标检测模型中骨干网络的初始化参数,使用所述第一数据集中的训练图像对所述可信目标检测模型进行训练,获得训练后的可信目标检测模型。7.根据权利要求6所述的一种融合主观逻辑和不确定性分布建模的可信目标检测方法,其特征在于,步骤3-2中对所述可信目标检测模型进行训练依赖于梯度下降算法,损失函数loss包括预测框定位损失l
giou
、预测框置信度损失l
obj
和预测框类别判定损失l
class
,即loss = l
giou l
obj l
class
,其中l
giou
和l
obj
分别为yolov5目标检测模型网络中的预测框的定位损失和预测框置信度损失,两者分别采用广义交并比损失和二元交叉熵损失进行计算;预测框类别判定损失l
class
使用狄利克雷分布作为多项式似然的先验概率,并通过对类别概率积分取得边际似然的负对数作为类别预测损失函数,同时加入kl正则化项,对所述可信目标检测模型的类别预测加以约束;利用定义好的损失函数loss,基于第一数据集中的训练图像训练所述可信目标检测模型的参数,直到损失函数loss收敛,获得训练好的不确定性分布建模的可信目标检测模型。8.根据权利要求7所述的一种融合主观逻辑和不确定性分布建模的可信目标检测方法,其特征在于,预测框类别判定损失l
class
表示为该式中,s2和b分别代表特征图中对应的网格数和网格中预测框数目;表示第i个网格中的第j个预测框是否用于预测目标,挑出目标标注边界框中心所在的网格所包含的预测框,选取其中与标注的目标边界框交并比最大的预测框用于预测目标, 置1,否则置0;λ
t = min(1.0, t/10)∈[0,1]是退火系数,t是当前训练周期的代数;l
i,j
(α
i,j
)表示第i个网格中第j个预测框各类别预测损失,定义为对类别概率积分取得边际似然的负对数,表达式如下所示:
该式中,y
i,j,k
为独热向量,该向量中有且只有一个元素即目标类别一项为1,其余元素为0,是真实边界框的类别标签;p
i,j,k
表示所述可信目标检测模型预测获得的第i个网格第j个预测框信息中的各类别信念质量,p
i,j
表示第i个网格第j个预测框整体的类别信念质量;β(
·
)表示k维贝塔多项式函数;s
i,j
表示第i个网格第j个预测框的狄利克雷强度,α
i,j,k
表示第i个网格第j个预测框第k个类别的狄利克雷参数,α
i,j
=[α
i,j,1
,α
i,j,2
,
…
,α
i,j,k
];表示kl正则化项,表达式如下:表示kl正则化项,表达式如下:是去除非误导性证据后的狄利克雷参数;γ(
·
)是伽玛函数;ψ(
·
)是双伽马函数。9.根据权利要求8所述的一种融合主观逻辑和不确定性分布建模的可信目标检测方法,其特征在于,步骤4包括:将第一数据集中的测试图像输入训练后的可信目标检测模型,设置阈值iou
thres
和pr(class)
thres
,筛选出符合要求的预测框信息;再采用非极大值抑制的方法,去冗余的预测框,保留合适的预测框;最后,取出筛选后的各个预测框信息,将其中目标定位信息、目标类别识别结果以及目标类别识别结果的整体可信度评估结果作为最终的目标检测结果输出,其中目标定位信息包括目标预测框边界信息,目标类别识别结果包括目标所属的类别和最大类别信念概率,目标类别识别结果的整体可信度评估结果包括整体的不确定质量。10.根据权利要求9所述的一种融合主观逻辑和不确定性分布建模的可信目标检测方法,其特征在于,步骤1中对所述图像数据进行预处理包括采用mosaic数据增强将两张以上的图像以随机缩放、随机裁剪、随机排布的方式进行拼接,获得一张新的图像,再将所述新的图像进行图像几何变换,获得预处理后的图像;构建第一数据集包括按照8:1:1的比例,对该第一数据集进行分割,获取训练集、验证集和测试集,所述训练集和验证集用于所述可信目标检测模型训练,所述测试集用于对训练后的可信目标检测模型进行测试。
技术总结
本发明公开一种融合主观逻辑和不确定性分布建模的可信目标检测方法,包括步骤1,采集图像数据,对所述图像数据进行预处理,对预处理后的图像进行目标标注,构建第一数据集;步骤2,构建可信目标检测模型;步骤3,训练所述可信目标检测模型,获得训练后的可信目标检测模型;步骤4,将第一数据集中的测试图像输入训练后的可信目标检测模型,获得图像中各个目标定位信息、目标类别识别结果和目标类别识别结果的整体可信度评估结果。本方法相比现有目标检测方法,提高了目标检测的查全率,不仅给出了目标检测结果,还对目标类别识别结果进行了可信度评估,为使用者的后续决策提供了依据。为使用者的后续决策提供了依据。为使用者的后续决策提供了依据。
技术研发人员:马驰 朱峰 孙华 张义武 韩东 乐意 陆中祥 孙镱诚 丁阳 肖志川 秦柳兰 孙浩
受保护的技术使用者:中国电子科技集团公司第二十八研究所
技术研发日:2022.06.27
技术公布日:2022/7/29
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。