1.本发明属于无人机技术领域,更具体地,属于微小型无人飞行器技术领域,提供一种共轴双旋翼无人飞行器。
背景技术:
2.微小型无人飞行器具有低成本、小尺寸、高机动等特点,过去二三十年中在世界范围内受到普遍关注和重视,在军事与民用领域都有大量的应用。在军事领域,使用大量各种型号的无人飞行器系统来完成战场侦察、监视、诱惑、骚扰、目标搜索和定位、火力与战果评估、反辐射、攻击等各种作战使命,并取得令人瞩目的战果。在民用领域,无人飞行器可应用于航拍制作、遥感测绘、货物运输、交通监控、环境监测、农业植保等领域。可以看到,微小型无人飞行器技术作为又一种新兴技术,它将是一项具有良好发展前途和广阔应用前景的具有高科技含量的新技术。随着许多相关领域的飞速发展,如传感器技术、制造技术、通讯技术等,微小型无人飞行器正变得比以往更加智能,渐渐成为人类不可或缺的帮手。
3.近年来,共轴双旋翼无人机因其独特的性能,被广泛应用于军事和民用领域。和常规无人机相比,共轴双旋翼无人机具有结构紧凑、气动特性对称、负载能力强、悬停效率高等优点,因而具有广泛的应用前景。但从目前国内外研究成果来看,大部分共轴无人机整体尺寸和重量较大,便携性较差。因此,研究和设计一款低成本,多用途,紧凑便携,使用简单的微小型共轴双旋翼无人飞行器具有必要性。
4.为了能使无人机在未知结构的室内环境中实现自主导航,同步定位和构图算法(simultaneous localization and mapping,slam)开始被应用在无人机上。通过slam算法的辅助定位和绘图,可以使无人机在未知结构的室内环境中边定位边绘制室内环境的地图,实现真正的自主导航。清华大学在四旋翼平台上,以激光雷达为传感器,将slam和惯性导航系统(ins,inertial navigation system) 进行数据融合,获得无人机的位置估计和环境地图的构建,并成功在室内实现自主飞行,具有较高的定位精度。
5.此外,比例-积分-微分控制器(pid)在飞行器控制中占据主导地位。pid 控制原理是基于误差来生成消除误差的控制策略:用误差的过去、现在和变化趋势的加权和控制策略。pid的缺点:
①
误差的取法;
②
由误差e提取de/dt的办法;
③“
加权和”策略不一定最好;
④
积分反馈有许多副作用。本发明探讨更好的控制策略,这种策略的宗旨是保留pid的优点,克服其缺点。
技术实现要素:
6.本发明为一种共轴双旋翼无人飞行器,要解决的技术问题包括共轴双桨动力系统设计、矢量控制伺服控制平台设计、紧凑空间机体结构设计、共轴双桨矢量控制技术以及无全球导航卫星系统(gnss,global navigation satellitesystem,)情况下的未知环境定位与导航系统。
7.一种共轴双旋翼无人飞行器,主要包括共轴双桨动力系统和矢量控制伺服控制系
统;
8.所述共轴双桨动力系统为采用上下两个外转子电机共轴反转提供动力源,包括上旋翼、上旋翼桨毂、上电机、下旋翼、下旋翼桨毂和下电机;上电机和下电机旋转方向相反,共同组成共轴双桨电机,上电机的定子、耳片盘、下电机的定子由上至下依次固定相连,上电机的外转子通过下旋翼桨毂与下旋翼相连,下电机的外转子输出轴穿过上电机中空的通道,通过上旋翼桨毂与上旋翼相连。如此,上电机驱动下旋翼,下电机驱动上旋翼。
9.所述的矢量控制伺服控制系统包括滚转控制舵机、俯仰控制舵机、内圈转子和外圈转子,具备两个自由度转动。内圈转子通过与共轴双桨动力系统的耳片盘固定,实现与共轴双桨电机的固定;外圈转子包括上部的圆环及其下部的连接件,上部的圆环上开设侧向通孔;内圈转子整体嵌套于外圈转子内,与外圈转子间隙配合,并通过转轴及外圈转子的圆环上的通孔与外圈转子铰接;外圈转子通过转轴及外圈转子的圆环上的通孔与机体铰接。滚转控制舵机设置于外圈转子上,且通过拉杆和摇臂与内圈转子相连,通过滚转控制舵机产生内圈转子和外圈转子之间的相对转动。俯仰控制舵机设置在机体上,且通过拉杆和摇臂与外圈转子连接,通过俯仰控制舵机控制产生外圈转子与机体结构之间的相对转动。如此,矢量控制伺服控制系统可以控制共轴双桨动力系统拉力的方向,实现飞行器的俯仰和滚转的矢量控制,而偏航控制通过两个电机的转速差,依靠电机的反扭力矩实现。内圈装置相对外圈转子的转动轴、外圈转子相对于机体的转动轴正交成90
°
,可控制拉力方向在以两转轴交点为顶点的50
°
锥角的圆锥内连续偏转,从而实现飞行器的俯仰和滚转的矢量控制,而偏航控制通过两个对转电机的转速差形成的反扭力矩实现。
10.进一步的,所述的下旋翼、上旋翼可折叠,折叠后紧贴圆柱形机身,具备携带方便的特点。
11.进一步的,整流罩设置在飞行器顶端,起落架设置在飞行器底端。
12.进一步的,所述的共轴双旋翼无人飞行器还包括gps模块、上电机电调、下电机电调、飞控计算机、电池、图数一体电台、电台天线、机载任务处理设备、可见光摄像头、红外摄像头、室内定位设备。
13.gps模块用于在有gnss信号的室外环境下给飞行器提供定位信息;上电机电调、下电机电调分别用于驱动、调整上电机和下电机;飞控计算机用于根据飞行传感器和任务指令,进行信息综合和参数解算,生成相应的控制指令控制电机和舵机,使飞行器按照期望的状态飞行;电池用于给飞行器供电;图数一体电台用于飞行器与地面控制站的通讯;机载任务处理设备用于imu与视觉定位传感器信号融合以及视觉-惯导同步定位与建图(vi-slam)导航定位解算。
14.进一步的,所述的共轴双旋翼无人飞行器采用紧凑空间机体结构设计,针对无人机紧凑、坚固的特点,采用竖直圆柱形机身,分舱段进行设计,包括包含动力系统舱段、航电设备舱段、可更换载荷舱段,动力系统舱段装配共轴双桨动力系统和矢量控制伺服控制系统;航电设备舱段装配gps、上电机电调、下电机电调、飞控计算机、电池、图数一体电台、电台天线;可更换载荷舱段装配机载任务处理设备、可见光摄像头、红外摄像头、室内定位设备。各舱段可进行嵌套形式的模块化装卸,便于快速更换和扩展。本发明飞行器具有携带方便、耐摔性好、维护性高、扩展性强的技术特点。力求在最小空间范围内完成对各结构部件的设计和各机载设备的布置,实现结构的稳定性和可靠性。机体结构主要采用尼龙材质增
材制造,可充分与机载设备共形设计,解决紧凑布局设备安装问题。部分缓冲连接件(包括飞控计算机、室内定位设备与机体之间的减震垫等)采用泡沫或海绵材质,减震的同时带来结构重量的减小。机载航电设备(例如电调、舵机、图数一体电台等)采用通用货架产品,可靠性高,有效节省开发研制成本。本发明飞行器具有模块化、尺寸小、振动小、噪声低、可靠性高的技术特点。
15.本发明的有益效果:本发明飞行器对比基于变距的共轴双旋翼飞行器,机械结构大大简化,在制造成本与可维护性上优势明显。本发明还具备多用途,紧凑便携,使用简单的优点,还能够结合控制方法通过改变拉力方向及双旋翼转速差实现姿态的控制。飞行器采用模块化载荷设计,可整体更换,通过不同载荷的选配,单机可实现一种或多种独立的任务功能。
附图说明
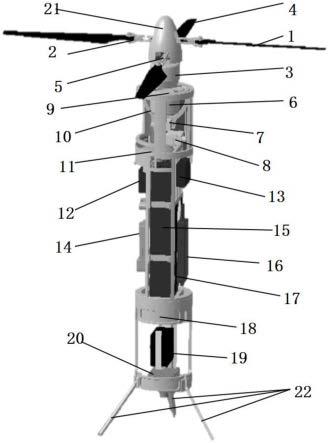
16.图1是本自主飞行的共轴双旋翼无人飞行器示意图,指出主要机载设备的布置;
17.图2是本发明自主飞行的共轴双旋翼无人飞行器完整控制系统结构框示意图;
18.图3是传统自抗扰控制器结构示意图;
19.图4是本发明改进的自抗扰控制器的结构示意图。
20.图5是本发明共轴双桨电机及桨叶安装示意图,其中(a)为上下电机,(b)为耳片盘,(c)为整体安装示意图。
21.图6是本发明矢量控制伺服控制平台内圈和外圈转子示意图,其中(a)为内圈转子,(b)为外圈转子主视图,(c)为外圈转子侧视图,(d)为外圈转子俯视图,(e)为外圈转子立体图。
22.图7是本发明飞行器动力系统与机体主体框架结构装配示意图,其中(a)为主视图,(b)为立体图。
23.图8是本发明矢量控制伺服控制平台滚转和俯仰控制示意图,其中(a)为滚转, (b)为俯仰。
24.图9是本发明模块化任务载荷示意图,其中(a)为主视图,(b)为侧视图,(c) 为题图,(d)为俯视图。
25.图10是本发明自主飞行的共轴双旋翼无人飞行器整机装配示意图,其中(a) 为旋翼折叠状态,(b)为旋翼伸展状态。
26.图11是本发明飞行流程图。
27.图中:1上旋翼、2上旋翼桨毂、3上电机、4下旋翼、5下旋翼桨毂、6下电机、7滚转控制舵机、8俯仰控制舵机、9内圈转子、10外圈转子、11gps模块、12 上电机电调、13下电机电调、14飞控计算机、15电池、16图数一体电台、17 电台天线、18机载任务处理设备、19可见光摄像头或红外摄像头、20室内定位设备、21整流罩、22起落架。
具体实施方式
28.本发明所涉及的共轴双旋翼是指桨叶可折叠的一正一反桨,分别安装在同轴的两个电机上,旋转方向相反,旋翼的反扭力矩相互抵消,桨间距离综合考虑结构及气流干扰而确定。飞行器通过改变拉力方向及双旋翼转速差实现姿态的控制,采用gnss定位设备与视
觉定位设备实现复杂环境中的定位。飞行器采用模块化载荷,可整体更换,单机可实现一种或多种独立的任务功能。
29.本发明的共轴双桨矢量控制技术,着重对矢量共轴双旋翼无人机飞行特性与操纵特性、抗扰飞行控制律设计等展开技术研究和验证。飞行控制律是飞行控制系统的核心。完整的控制系统包括位置、速度和姿态控制器。首先由位置控制器给出体轴下的速度矫正;其次由速度控制器给出姿态矫正;最后由姿态控制器计算姿态操纵矫正。控制系统结构如图2所示。
30.自抗扰控制技术(adrc)不依赖于模型,可以处理各种内部不确定性,具有很强的鲁棒性。adrc由三部分组成:跟踪微分器(td),扩张状态观测器(eso) 和非线性状态误差反馈律(nlsef)。自抗扰控制器结构如图3所示。
31.本发明在传统自抗扰控制器的基础上,设计了一种新的自抗扰控制器结构。对扩张状态观测器eso进行结构修改,用径向基函数神经网络(rbf)的扰动观测值代替eso的扰动观测值,计算简单,易于实现,在一定程度上解决了参数整定的问题。将滑模控制引入到nlsef中,进一步提高了响应速度和系统的鲁棒性。改进的adrc的结构如图4所示。
32.本发明飞行器的导航定位采用了gnss信号与imu融合的惯性卫星组合导航,以及imu与视觉定位传感器信号融合的视觉-惯导同步定位与建图 (vi-slam)导航定位,当gnss信号失效时自动切换到vi-slam模式。飞行器无论在有gnss覆盖的空旷环境,还是在密闭和gnss拒止的环境,均可实现自主飞行。采用gnss信号接收机、imu以及视觉定位传感器。在有gnss 信号时,采用卫星惯性组合导航;在无gnss信号时,采用未知环境定位与导航系统实现无人机自主环境探索,功能模块包括自主定位、环境建图与路径规划两部分。自主定位采用视觉-惯导同步定位与建图(vi-slam),系统将以起飞位置为原点建立全局坐标系,通过融合视觉与惯导系统量测信息对无人机相对位姿进行估计。建图与路径规划负责解决无人机运动规划问题,通过建立栅格地图并运行路径搜索算法,导引无人机向指定目标飞行,同时规避障碍。
33.实施例1:下面结合附图,对本发明在有gnss信号的环境中自主执行任务作进一步描述。
34.如图11所示,给飞行器上电,检测到gnss信号并完成自检,操作人员通过手持便携式地面站规划任务航线,形成多个三维航点存储在飞控计算机中,发送执行指令后,飞行器自主起飞,按任务航线飞行,到达任务区域执行完任务后,按任务航线归航,并自主降落。在任务航线飞行过程中遇到障碍物,通过状态空间的随机采样点,把航线导向空白区域,从而寻找到一条从起始点到目标点的规划路径,解决飞行器在复杂环境下和动态环境中的路径规划。
35.飞行器通过gnss传感器与imu融合,解算飞行器在导航坐标系下的位置,与规划航线中的应飞航点比较,通过位置控制算法解算出应飞航向和应飞速度,飞行控制器航向控制律根据给定航向和当前航向偏差,经过航向自抗扰控制器生成相应的电机转速控制指令,完成航向控制闭环;速度控制律根据给定速度与当前速度的偏差生成总动力控制信号及姿态控制指令,动力控制信号转换成电机转速控制指令,完成速度闭环控制;姿态控制律根据给定姿态与当前姿态偏差,通过姿态自抗扰控制器生成矢量控制舵机的控制信号,并进行动力补偿控制,形成姿态补偿的电机转速控制信号,完成姿态的闭环控制。生成的所有
电机转速控制信号通过混控后,最终形成综合的电机控制信号给电调,通过电调控制电机转速。
36.实施例2:下面结合附图,对本发明在无gnss信号的环境中自主执行任务作进一步描述。
37.如图11所示,给飞行器上电,检测到无gnss信号,飞行器自动切换到视觉定位导航模式,操作人员通过手持便携式地面站规划任务航线,装载航路点配置文件,发送起飞指令后,飞行器自主起飞,通过前置视觉定位设备,解算生成以起飞位置为原点的全局坐标系定位信息,引导飞行器按照装载的任务航线飞行,到达任务区域执行完任务后,按任务航线归航,并自主降落。在任务航线飞行过程中遇到障碍物,通过状态空间的随机采样点,把航线导向空白区域,从而寻找到一条从起始点到目标点的规划路径,解决飞行器在复杂环境下和动态环境中的路径规划。
38.飞行器通过视觉定位传感器与imu融合,解算飞行器在以起飞位置为原点的全局坐标系下位置信息,接下来的位置控制、速度控制和姿态控制与实施例1 一致。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。