技术特征:
1.一种自动驾驶和驾驶辅助系统,包括进行自动驾驶的多辆自动驾驶车辆和辅助多辆所述自动驾驶车辆的自动驾驶的自动驾驶辅助装置,其特征在于,所述自动驾驶车辆包括:预定路径生成部,该预定路径生成部生成从当前地点到目标地点的行驶预定路径,将所生成的所述行驶预定路径发送给所述自动驾驶辅助装置;以及目标轨道生成部,该目标轨道生成部生成使本车辆跟随行驶的目标行驶轨道,并将所生成的所述目标行驶轨道发送给所述自动驾驶辅助装置,所述自动驾驶辅助装置包括:预定路径获取部,该预定路径获取部从所述自动驾驶车辆获取所述行驶预定路径;目标轨道获取部,该目标轨道获取部从所述自动驾驶车辆获取所述目标行驶轨道;以及前车轨道发送部,该前车轨道发送部在从前方车辆获取到所述目标行驶轨道的情况下,将获取到的所述目标行驶轨道发送到被设定为辅助自动驾驶的对象的自动驾驶车辆即辅助对象车辆,所述前方车辆在与从所述辅助对象车辆获取的所述行驶预定路径的车道或当前所述辅助对象车辆的行驶车道相同的车道上行驶于前方,所述目标轨道生成部从所述自动驾驶辅助装置获取到所述前方车辆的所述目标行驶轨道的情况下,基于所获取到的所述前方车辆的所述目标行驶轨道,生成本车辆的所述目标行驶轨道。2.如权利要求1所述的自动驾驶和驾驶辅助系统,其特征在于,所述目标轨道生成部在生成了进行车道变更的所述目标行驶轨道时,将所生成的所述目标行驶轨道发送到所述自动驾驶辅助装置。3.如权利要求1或2所述的自动驾驶和驾驶辅助系统,其特征在于,所述目标轨道生成部在本车辆的行驶车道前方检测到障碍物并生成为了避开所述障碍物而进行车道变更的所述目标行驶轨道的情况下,将所生成的所述目标行驶轨道发送到所述自动驾驶辅助装置。4.如权利要求1至3中任一项所述的自动驾驶和驾驶辅助系统,其特征在于,所述前车轨道发送部在所述辅助对象车辆的车型与所述前方车辆的车型一致的情况下,将所述前方车辆的所述目标行驶轨道发送到所述辅助对象车辆。5.如权利要求1至4中任一项所述的自动驾驶和驾驶辅助系统,其特征在于,所述目标轨道获取部将过去获取的自动驾驶车辆的行驶轨迹或所述目标行驶轨道存储为过去目标行驶轨道,所述前车轨道发送部将在与所述辅助对象车辆的所述行驶预定路径的车道或当前所述辅助对象车辆的行驶车道相同的车道前方所存储的所述过去目标行驶轨道作为所述前方车辆的所述目标行驶轨道发送到所述辅助对象车辆。6.如权利要求5所述的自动驾驶和驾驶辅助系统,其特征在于,所述目标轨道获取部仅在预先设定的存储期间内存储过去获取到的所述行驶轨迹或所述目标行驶轨道。7.如权利要求5或6所述的自动驾驶和驾驶辅助系统,其特征在于,所述前车轨道发送部从所存储的多个所述过去目标行驶轨道中,搜索所述过去目标行
驶轨道的起点位于与所述辅助对象车辆的所述行驶预定路径的车道或当前所述辅助对象车辆的行驶车道相同的车道前方的所述过去目标行驶轨道,将搜索到的所述过去目标行驶轨道作为所述前方车辆的所述目标行驶轨道发送到所述辅助对象车辆。8.如权利要求1至7中任一项所述的自动驾驶和驾驶辅助系统,其特征在于,所述前车轨道发送部将所述辅助对象车辆的速度乘以预先设定的目标车道变更期间,计算出目标车道变更距离,在所述前方车辆的所述目标行驶轨道中包含车道变更的情况下,将所述前方车辆的所述目标行驶轨道修正为从离车道变更完成地点还有所述目标车道变更距离的地点开始变更车道的行驶轨道,将修正后的所述前方车辆的所述目标行驶轨道发送到所述辅助对象车辆。9.如权利要求1至8中任一项所述的自动驾驶和驾驶辅助系统,其特征在于,所述自动驾驶辅助装置设置在与网络连接的服务器上,所述前车轨道发送部在所述前方车辆的所述目标行驶轨道中包含为了避开障碍物而进行的车道变更的情况下,将所述前方车辆的所述目标行驶轨道发送到所述辅助对象车辆。10.一种自动驾驶辅助装置,其特征在于,包括:预定路径获取部,该预定路径获取部从自动驾驶车辆获取行驶预定路径;目标轨道获取部,该目标轨道获取部从自动驾驶车辆获取目标行驶轨道;以及前车轨道发送部,该前车轨道发送部在从前方车辆获取到所述目标行驶轨道的情况下,将获取到的所述前方车辆的所述目标行驶轨道发送到被设定为辅助自动驾驶的对象的自动驾驶车辆即辅助对象车辆,使所述辅助对象车辆基于所述前方车辆的所述目标行驶轨道,生成本车辆的所述目标行驶轨道,所述前方车辆在与从所述辅助对象车辆获取的所述行驶预定路径的车道或当前所述辅助对象车辆的行驶车道相同的车道上行驶于前方。11.一种自动驾驶车辆,其特征在于,包括:预定路径生成部,该预定路径生成部生成从当前地点到目标地点的行驶预定路径,将所生成的所述行驶预定路径发送给自动驾驶辅助装置;目标轨道生成部,该目标轨道生成部生成使本车辆跟随行驶的目标行驶轨道,并将所生成的所述目标行驶轨道发送给所述自动驾驶辅助装置;以及前方车辆轨道获取部,该前方车辆轨道获取部从所述自动驾驶辅助装置获取前方车辆的所述目标行驶轨道,所述前方车辆是在与所述行驶预定路径的车道或当前本车辆的行驶车道相同的车道上行驶于前方的其他车辆,所述目标轨道生成部获取到所述前方车辆的所述目标行驶轨道的情况下,基于所获取到的所述前方车辆的所述目标行驶轨道,生成本车辆的所述目标行驶轨道。12.一种自动驾驶和驾驶辅助方法,使用进行自动驾驶的多辆自动驾驶车辆和辅助所述多辆自动驾驶车辆的自动驾驶的自动驾驶辅助装置,其特征在于,包括:预定路径生成步骤,所述自动驾驶车辆生成从当前地点到目标地点的行驶预定路径,将所生成的所述行驶预定路径发送到所述自动驾驶辅助装置;目标轨道生成步骤,所述自动驾驶车辆生成使本车辆进行跟随行驶的目标行驶轨道,并将所生成的所述目标行驶轨道发送到所述自动驾驶辅助装置;
预定路径获取步骤,所述自动驾驶辅助装置从所述自动驾驶车辆获取所述行驶预定路径;目标轨道获取步骤,所述自动驾驶辅助装置从所述自动驾驶车辆获取所述目标行驶轨道;以及前车轨道发送步骤,所述自动驾驶辅助装置从前方车辆获取到所述目标行驶轨道的情况下,将获取到的所述目标行驶轨道发送到被设定为辅助自动驾驶的对象的自动驾驶车辆即辅助对象车辆,所述前方车辆在与从所述辅助对象车辆获取的所述行驶预定路径的车道或当前所述辅助对象车辆的行驶车道相同的车道上行驶于前方,所述目标轨道生成步骤中,所述自动驾驶车辆从所述自动驾驶辅助装置获取到所述前方车辆的所述目标行驶轨道的情况下,基于所获取到的所述前方车辆的所述目标行驶轨道,生成本车辆的所述目标行驶轨道。13.一种自动驾驶辅助方法,其特征在于,包括:预定路径获取步骤,从自动驾驶车辆获取从当前地点到目标地点的行驶预定路径;目标轨道获取步骤,从自动驾驶车辆获取用于使本车辆跟随行驶的目标行驶轨道;以及前车轨道发送步骤,从前方车辆获取到所述目标行驶轨道的情况下,将获取到的所述前方车辆的所述目标行驶轨道发送到被设定为辅助自动驾驶的对象的自动驾驶车辆即辅助对象车辆,使所述辅助对象车辆基于所述前方车辆的所述目标行驶轨道,生成本车辆的所述目标行驶轨道,所述前方车辆在与从所述辅助对象车辆获取的所述行驶预定路径的车道或当前所述辅助对象车辆的行驶车道相同的车道上行驶于前方。14.一种自动驾驶方法,其特征在于,包括:预定路径生成步骤,生成从当前地点到目标地点的行驶预定路径,将所生成的所述行驶预定路径发送给自动驾驶辅助装置;目标轨道生成步骤,生成使本车辆跟随行驶的目标行驶轨道,并将所生成的所述目标行驶轨道发送给所述自动驾驶辅助装置,所述目标轨道生成步骤中,从所述自动驾驶辅助装置获取到前方车辆的所述目标行驶轨道的情况下,基于获取到的所述前方车辆的所述目标行驶轨道,生成本车辆的所述目标行驶轨道,所述前方车辆在与所述行驶预定路径的车道或当前本车辆的行驶车道相同的车道上行驶于前方。15.一种自动驾驶辅助程序,其特征在于,使计算机执行如下步骤:预定路径获取步骤,从自动驾驶车辆获取从当前地点到目标地点的行驶预定路径;目标轨道获取步骤,从自动驾驶车辆获取用于使本车辆跟随行驶的目标行驶轨道;以及前车轨道发送步骤,在从前方车辆获取到所述目标行驶轨道的情况下,将获取到的所述前方车辆的所述目标行驶轨道发送到被设定为辅助自动驾驶的对象的自动驾驶车辆即辅助对象车辆,使所述辅助对象车辆基于所述前方车辆的所述目标行驶轨道,生成本车辆的所述目标行驶轨道,所述前方车辆在与从所述辅助对象车辆获取的所述行驶预定路径的车道或当前所述辅助对象车辆的行驶车道相同的车道上行驶于前方。16.一种自动驾驶程序,其特征在于,使计算机执行以下步骤:
预定路径生成步骤,生成从当前地点到目标地点的行驶预定路径,将所生成的所述行驶预定路径发送给自动驾驶辅助装置;以及目标轨道生成步骤,生成用于使本车辆跟随行驶的目标行驶轨道,并将所生成的所述目标行驶轨道发送到所述自动驾驶辅助装置,所述目标轨道生成步骤中,从所述自动驾驶辅助装置获取到前方车辆的所述目标行驶轨道的情况下,基于获取到的所述前方车辆的所述目标行驶轨道,生成本车辆的所述目标行驶轨道,所述前方车辆在与所述行驶预定路径的车道或当前本车辆的行驶车道相同的车道上行驶于前方。
技术总结
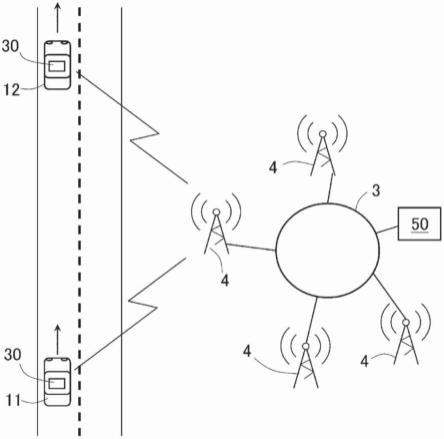
本发明提供一种自动驾驶和驾驶辅助系统等,能抑制自动驾驶车辆的运算处理负载增加的同时,能使自动驾驶车辆生成适用于自动驾驶车辆无法检测出的前方道路状况的目标行驶轨道。该自动驾驶和驾驶辅助系统中,自动驾驶辅助装置(50)在从前方车辆获取到目标行驶轨道的情况下,将目标行驶轨道发送给辅助对象车辆,自动驾驶车辆基于所获取的前方车辆的目标行驶轨道来生成本车辆的目标行驶轨道,所述前方车辆在与从辅助对象车辆获取的行驶预定路径相同的车道上行驶于前方。同的车道上行驶于前方。同的车道上行驶于前方。
技术研发人员:西胁刚史 和田佑太 伊藤益夫
受保护的技术使用者:三菱电机株式会社
技术研发日:2019.12.13
技术公布日:2022/7/28
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。