1.本发明大体上涉及交通监控系统领域,更具体地,涉及估计道路交通参与者的事故风险等级的方法。
背景技术:
2.随着交通密度的增加,道路拥堵和事故也在增加。因此,在这种情况下,交通监控是一个巨大的挑战。交通监控有许多技术和应用,了解用户过去的驾驶行为也被认为有助于评估事故风险。例如,汽车保险提供商的目标之一是设定与保单持有人(也可称为用户或驾驶员)可识别的损失风险相关的保单价格(保费)。从这个角度来看,应能理解,用户过去的驾驶行为可以有助于预测发生车祸而给保险提供商造成损失的可能性。
3.目前,已经通过在传统机动车辆上安装传统传感器装置(或传感器盒)进行了一些尝试来确定用户过去的驾驶行为。传统的传感器装置包括全球导航卫星系统(global navigation satellite system,gnss)接收器、加速度计、惯性测量单元(inertial measuring unit,imu)或外感传感器(例如摄像头、雷达),用于估计用户的事故风险等级(也称为碰撞风险等级)。用户的事故风险等级(或碰撞风险等级)是通过使用根据两种传统方法的传统传感器装置来估计的。第一种传统方法用于根据传统传感器装置(例如加速度计)的直接处理来检测安全关键事件。第一种传统方法依赖于识别用户自然驾驶期间的任何硬加速或制动。但是,第一种传统方法的缺点是,硬加速或制动与用户的攻击性以及与事故风险等级(或碰撞风险等级)的相关性的解释性较差。例如,在一些情况下,用户(例如保单持有人)可能不关心与另一机动车辆的可能的碰撞,且不会减速与其它机动车协商通过十字路口,因此即使该情况不涉及任何硬加速或制动也还是会被贴上高风险标签。这是指关键事件可以在没有任何硬加速或制动的情况下发生。第二种传统方法基于使用传统传感器装置(例如全球导航卫星系统(global navigation satellite system,gnss)接收器和摄像头)识别风险分数。根据与事故风险等级的统计相关性,将风险分数分配给用户的每个被识别动作。例如,频繁改变车道的用户更有可能遭遇车祸或碰撞,因此,用户的此类动作被分配了高风险分数。用户的不同动作是根据变道、掉头或超车来识别的,因此用户不专注于与其它机动车辆的交互和协商,从而导致车祸或碰撞。但是,以这种方式分配的风险分数可能不足以准确估计用户机动车辆的事故风险等级。因此,存在对用户机动车辆(即道路交通参与者)的事故风险等级估计低效和不准确的技术问题。
4.因此,根据上述讨论,需要克服与估计用户机动车辆事故风险等级的传统方法相关的上述缺点。
技术实现要素:
5.本发明旨在提供一种估计道路交通参与者的事故风险等级的方法。本发明旨在提供针对道路交通参与者的事故风险等级估计低效和不准确的现有问题的方案。本发明的目的是提供一种至少部分解决现有技术中遇到的问题并提供一种准确估计道路交通参与者
的事故风险等级的改进方法和系统的方案。
6.本发明的目的是通过所附独立权利要求中提供的方案实现的。本发明的有利实现方式在从属权利要求中进一步定义。
7.在一个方面,本发明提供一种估计道路交通参与者的事故风险等级的方法。所述道路交通参与者是多个道路交通参与者中的第一参与者。所述多个道路交通参与者包括所述第一参与者和一个或多个其它参与者。所述方法包括根据以下各项生成第一参与者的多个虚拟轨迹:第一参与者的记录的初始位置、第一参与者的记录的最终位置和一个或多个其它参与者中的每一个参与者的记录的初始位置,其中,第一参与者的虚拟轨迹中的每一个虚拟轨迹从第一参与者的记录的初始位置延伸到第一参与者的记录的最终位置,第一参与者的多个虚拟轨迹与第一参与者的多个虚拟行为一对一关联。所述方法还包括在所述第一参与者的所述多个虚拟轨迹中识别与所述第一参与者的记录轨迹最相似的虚拟轨迹,所述第一参与者的所述记录轨迹从所述第一参与者的所述记录的初始位置延伸到所述记录的最终位置。所述方法还包括根据与所识别的虚拟轨迹相关联的虚拟行为估计事故风险等级。
8.本发明的方法从与一个或多个其它道路交通参与者交互的角度提供了关于第一参与者的动作的自动解释。此类解释对汽车保险是有益的,因为大量的碰撞是由于与一个或多个其它道路交通参与者的交互太少而发生的。所公开的方法使用与所述第一参与者的所述多个虚拟行为相关联的所述多个虚拟轨迹来解释所述第一参与者执行的实际轨迹(即记录轨迹),从而更准确地估计所述第一参与者的所述事故风险等级。所公开的方法识别第一参与者的新动作,并相应地更新第一参与者的事故风险等级。所公开的方法根据与一个或多个其它道路交通参与者的交互和协商推断第一参与者(例如自我意识汽车)的事故风险等级。
9.在一种实现方式中,生成第一参与者的多个虚拟轨迹的方法包括根据第一参与者的相应的虚拟行为,为第一参与者的多个虚拟行为中的每一个虚拟行为生成第一参与者的相应的虚拟轨迹。
10.通过根据第一参与者的相应的虚拟行为生成相应的虚拟轨迹,估计第一参与者的更准确的事故风险等级。
11.在另一种实现方式中,生成第一参与者的多个虚拟轨迹的方法包括进一步根据一个或多个其它参与者中的每一个参与者的记录的初始位置,为第一参与者的多个虚拟行为中的每一个虚拟行为生成第一参与者的相应的虚拟轨迹。
12.通过根据一个或多个其它参与者中的每一个参与者的记录的初始位置生成第一参与者的相应的虚拟轨迹,更精确地估计事故风险等级,以检测第一参与者如何与一个或多个其它参与者交互或协商。
13.在另一种实现方式中,生成第一参与者的多个虚拟轨迹的方法包括为一个或多个其它参与者中的每一个参与者生成虚拟最终位置。所述方法还包括根据第一参与者的多个行为中的第一虚拟行为生成第一参与者的第一虚拟轨迹,其中,第一参与者的第一虚拟轨迹是第一参与者的多个虚拟轨迹中的第一个虚拟轨迹。所述方法还包括根据相应的其它参与者的虚拟行为,为一个或多个其它参与者中的每一个参与者生成相应的其它参与者的虚拟轨迹,其中,相应的其它参与者的虚拟轨迹从相应的参与者的记录的初始位置延伸到相
应的参与者的虚拟最终位置。该方法还包括根据第一参与者的第一虚拟轨迹和根据一个或多个其它参与者中的每一个参与者的虚拟轨迹识别一个或多个接近区域,其中,每个接近区域是其中第一参与者与一个或多个其它参与者中的至少一个接近的时空区域,并且对于一个或多个接近区域中的每一个接近区域,以及对于第一参与者多个虚拟行为中的一个或多个其它虚拟行为中的每一个虚拟行为,该方法还包括根据相应的接近区域和根据相应的其它虚拟行为生成第一参与者的另一个虚拟轨迹。
14.估计事故风险等级的方法侧重于第一参与者与一个或多个其它参与者中的每一个参与者的交互和协商(例如让道或占道),以避免碰撞。根据第一参与者的多个虚拟轨迹,识别第一参与者与一个或多个其它参与者的接近区域。根据所识别的接近区域,更新第一参与者和一个或多个其它参与者的多个虚拟轨迹以避免碰撞。
15.在另一种实现方式中,为一个或多个其它参与者中的每一个参与者生成虚拟最终位置的方法包括根据相应的其它参与者的记录的初始位置生成相应的虚拟最终位置。
16.通过根据相应的其它参与者的记录的初始位置生成相应的虚拟最终位置,可以计算第一参与者的多个虚拟轨迹以避免事故。
17.在另一种实现方式中,生成相应的虚拟最终位置的方法进一步根据包括第一参与者的记录的初始位置和其它参与者中的每一个参与者的记录的初始位置的区域的地图。
18.通过使用包括第一参与者的记录的初始位置和其它参与者中的每一个参与者的记录的初始位置的区域的地图,以更精确的方式生成相应的参与者的多个虚拟轨迹。此外,可以容易地检查第一参与者的虚拟行为,以符合存储在区域地图上的交通规则。
19.在另一种实现方式中,生成相应的虚拟最终位置的方法进一步根据交通规则信息,交通规则信息是关于适用于该区域的交通规则的信息。
20.通过使用交通规则信息来生成相应的虚拟最终位置,更准确地估计了整体事故风险等级。
21.在另一种实现方式中,估计事故风险等级的方法进一步根据交通规则信息。
22.在检查第一参与者的虚拟行为是否符合交通规则的基础上,更准确地估计了事故风险等级。例如,在一些情况下,第一参与者的虚拟行为(例如占道)与交通规则的让行标志不兼容,这反过来可能导致更大的事故风险等级。
23.应理解,可以组合所有上述实现方式。
24.需要说明的是,本技术中描述的所有设备、元件、电路、单元和模块可以通过软件或硬件元件或其任何类型的组合实现。本技术中描述的各种实体执行的所有步骤和所描述的将由各种实体执行的功能旨在表明相应的实体用于执行相应的步骤和功能。虽然在以下具体实施例的描述中,外部实体执行的具体功能或步骤没有在执行所述具体步骤或功能的所述实体的具体详述元件的描述中反映,但是技术人员应清楚,这些方法和功能可以通过相应的硬件或软件元件或其任何组合实现。应理解,在不脱离所附权利要求书定义的本发明的范围的情况下,可以对本发明的特征进行各种组合。
25.本发明的附加方面、优点、特征和目的从附图和结合以下所附权利要求书解释的说明性实现方式的详细描述中变得显而易见。
附图说明
26.结合附图阅读,可以更好地理解以上概述以及以下说明性实施例的详细描述。为了说明本发明,在附图中示出了本发明的示例性结构。但是,本发明不限于本文公开的具体方法和工具。此外,本领域技术人员应理解,附图不是按比例绘制的。在可能的情况下,相同的元件用相同的数字表示。
27.现在参考以下附图、仅通过示例的方式描述本发明的实施例,其中:
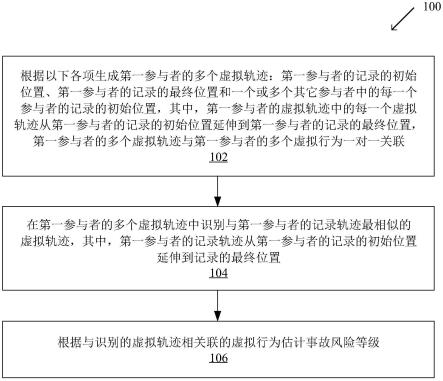
28.图1是根据本发明的实施例的估计道路交通参与者的事故风险等级的方法的流程图;
29.图2是根据本发明的实施例的估计道路交通参与者的事故风险等级的方法的各种操作的工作流水线;
30.图3是根据本发明的实施例的示例性驾驶场景,示出了道路交通参与者的记录的初始位置;
31.图4是根据本发明的实施例的示例性驾驶场景,示出了道路交通参与者的最终位置;
32.图5a是根据本发明的实施例的示例性驾驶场景,示出了道路交通参与者的多个虚拟轨迹;
33.图5b是根据本发明的实施例的第一参与者在时空区域中的无交互运动规划的图形表示;
34.图5c是根据本发明的实施例的第二参与者在时空区域中的无交互运动规划的图形表示;
35.图5d是根据本发明的实施例的场景,示出了道路交通参与者的轨迹生成器;
36.图6a是根据本发明的实施例的示例性驾驶场景,示出了道路交通参与者发生碰撞;
37.图6b是根据本发明的实施例的场景,示出了道路交通参与者的轨迹生成器;
38.图7a是根据本发明的实施例的示例性驾驶场景,示出了用于避免碰撞的道路交通参与者的多个虚拟轨迹;
39.图7b是根据本发明的实施例的场景,示出了避免道路交通参与者发生碰撞的轨迹生成器;
40.图7c是根据本发明的实施例的场景,示出了避免道路交通参与者发生碰撞的轨迹生成器;
41.图7d是根据本发明的实施例的第一参与者基于让道的虚拟行为的运动规划的图形表示;
42.图7e是根据本发明的实施例的第二参与者基于占道的虚拟行为的运动规划的图形表示;
43.图7f是根据本发明的实施例的第一参与者基于占道的虚拟行为的运动规划的图形表示;
44.图7g是根据本发明的实施例的第二参与者基于让道的虚拟行为的运动规划的图形表示;
45.图8a是根据本发明的实施例的示例性驾驶场景,示出了道路交通参与者发生碰
撞;
46.图8b是根据本发明的实施例的场景,示出了道路交通参与者的轨迹生成器;
47.图8c是根据本发明的实施例的避免道路交通参与者发生碰撞的示例性驾驶场景;
48.图8d是根据本发明的实施例的场景,示出了避免道路交通参与者发生碰撞的轨迹生成器;
49.图8e是根据本发明的实施例的场景,示出了避免道路交通参与者发生碰撞的轨迹生成器;
50.图8f是根据本发明的实施例的场景,示出了避免道路交通参与者发生碰撞的轨迹生成器;
51.图8g是根据本发明的实施例的道路交通参与者的运动规划的图形表示;
52.图8h是根据本发明的实施例的道路交通参与者的运动规划的图形表示;
53.图9a是根据本发明的实施例的示例性驾驶场景,示出了道路交通参与者发生碰撞;
54.图9b是根据本发明的实施例的场景,示出了道路交通参与者的轨迹生成器;
55.图9c是根据本发明的实施例的道路交通参与者的运动规划的图形表示;
56.图9d是根据本发明的实施例的第一参与者的碰撞风险特征的计数的图形表示;
57.图10a是根据本发明的实施例的第一参与者在空间路径方面的轨迹匹配的图形表示;
58.图10b是根据本发明的实施例的第一参与者在时空区域中的轨迹匹配的图形表示;
59.图10c是根据本发明的实施例的第一参与者在空间路径区域中的匹配分数的图形表示;
60.图10d是根据本发明的实施例的第一参与者在时空区域中的匹配分数的图形表示;
61.图11a是根据本发明的实施例的具有多个交通参与者和一个服务器的系统的网络环境图;
62.图11b是根据本发明的实施例的第一参与者的各种示例性部件的框图;
63.图11c是根据本发明的实施例的服务器的各种示例性部件的框图;
64.图12是根据本发明的实施例的第一参与者的标准化风险特征的计算的示例性实现方式;
65.在附图中,带下划线的数字用于表示带下划线的数字所在的项目或与带下划线的数字相邻的项目。不带下划线的数字是指由将不带下划线的数字与项目连接的线所标识的项目。当一个数字不带下划线并具有关联的箭头时,不带下划线的数字用于标识箭头指向的一般项目。
具体实施方式
66.以下详细描述说明了本发明的实施例以及可以实现这些实施例的方式。尽管已经公开了实施本发明的一些模式,但本领域技术人员应认识到,也可以存在用于实施或实践本发明的其它实施例。
67.图1是根据本发明的实施例的估计道路交通参与者的事故风险等级的方法的流程图。参考图1,示出了估计道路交通参与者的事故风险等级的方法100。方法100包括步骤102至106。例如,在一种实现方式中,方法100在图11a至图11c中详细描述的道路交通参与者中执行。
68.方法100估计道路交通参与者的事故风险等级。所述道路交通参与者是多个道路交通参与者中的第一参与者。所述多个道路交通参与者包括所述第一参与者和一个或多个其它参与者。方法100估计第一参与者与一个或多个其它道路交通参与者的事故风险等级。事故风险等级也可以被称为第一参与者与一个或多个其它道路交通参与者的碰撞风险等级。例如,第一参与者可以是自动驾驶车辆。或者,第一参与者可以是非自动驾驶车辆(例如人驾驶车辆),或半自动驾驶车辆。类似地,一个或多个其它道路交通参与者对应于非自动驾驶车辆、自动驾驶车辆、半自动驾驶车辆或行人等。
69.在步骤102中,方法100包括根据以下各项生成第一参与者的多个虚拟轨迹:第一参与者的记录的初始位置、第一参与者的记录的最终位置和一个或多个其它参与者中的每一个参与者的记录的初始位置,其中,第一参与者的虚拟轨迹中的每一个虚拟轨迹从第一参与者的记录的初始位置延伸到第一参与者的记录的最终位置,第一参与者的多个虚拟轨迹与第一参与者的多个虚拟行为一对一关联。方法100根据用于生成第一参与者的多个虚拟轨迹的轨迹生成算法估计第一参与者的事故风险等级。第一参与者的多个虚拟轨迹是根据第一参与者的记录的初始位置和第一参与者的记录的最终位置以及一个或多个其它参与者的记录的初始位置生成的。在一种实现方式中,第一参与者的记录的初始位置也可以称为起始位置,第一参与者的记录的最终位置也可以称为目的位置。第一参与者的多个虚拟轨迹与第一参与者的多个虚拟行为一对一关联。第一参与者的多个虚拟行为对应于第一参与者在与一个或多个其它道路交通参与者进行交互或协商的同时从记录的初始位置到记录的最终位置可能执行的不同动作。例如,在图6a、图7a、图8a、图8c和图9a中详细描述了估计第一参与者与一个或多个其它道路交通参与者的事故风险等级的不同示例性场景。
70.在步骤104中,方法100还包括在第一参与者的多个虚拟轨迹中识别与第一参与者的记录轨迹最相似的虚拟轨迹,其中,第一参与者的记录轨迹从第一参与者的记录的初始位置延伸到第一参与者的记录的最终位置。在多个虚拟轨迹中识别与第一参与者的记录轨迹最相似的虚拟轨迹能够自动解释第一参与者的一个或多个动作。在一种实现方式中,第一参与者的记录轨迹可以根据速度和空间位置随时间的序列来表征。在此类实现方式中,基于距离的相似性度量可用于识别多个虚拟轨迹中与第一参与者的记录轨迹最相似的虚拟轨迹。例如,在图9a中详细描述了此类实现场景。
71.在步骤106,方法100还包括根据与所识别的虚拟轨迹相关联的虚拟行为估计事故风险等级。事故风险等级(或碰撞风险等级)是根据连续收集的第一参与者执行的一个或多个动作来估计的,进而建立多个碰撞风险特征。多个碰撞风险特征包括第一参与者所关注的事故(或碰撞)数量,该数量是指第一参与者已经执行了动作(例如占道(tw)或让道(gw)一个或多个其它道路交通参与者)的事故的数量。多个碰撞风险特征还包括第一参与者执行的占道让道比率(tw/gw)和tr指数,其中,tr指数是第一参与者每驾驶100km违反交通规则的次数。
72.根据实施例,生成第一参与者的多个虚拟轨迹的方法包括根据第一参与者的相应
的虚拟行为,为第一参与者的多个虚拟行为中的每一个虚拟行为生成第一参与者的相应的虚拟轨迹。例如,在交叉点,第一参与者可以具有不同的虚拟行为,例如第一参与者可以给另一个交通参与者让道,或者从另一个交通参与者那里占道,或者在穿过交叉点时不与另一个交通参与者交互。针对第一参与者的每个虚拟行为,会生成相应的虚拟轨迹。这样,根据第一参与者的多个虚拟行为(例如占道、让道或无交互的虚拟行为)生成多个虚拟轨迹。
73.根据实施例,生成第一参与者的多个虚拟轨迹的方法包括进一步根据一个或多个其它参与者中的每一个参与者的记录的初始位置,为第一参与者的多个虚拟行为中的每一个虚拟行为生成第一参与者的相应的虚拟轨迹。例如,一个或多个其它交通参与者中的每一个参与者的记录的初始位置包括交叉点。在这种情况下,第一参与者的虚拟行为包括在交叉点给一个或多个其它交通参与者让道、在交叉点从一个或多个其它交通参与者占道或在交叉点的无交互轨迹。根据第一参与者的虚拟行为的不同类型和一个或多个其它参与者中的每一个参与者的记录的初始位置,生成第一参与者的相应的虚拟轨迹。
74.根据实施例,生成第一参与者的多个虚拟轨迹的方法包括为一个或多个其它参与者中的每一个参与者生成虚拟最终位置。一个或多个其它交通参与者的虚拟最终位置也影响第一参与者的虚拟行为,并相应地影响第一参与者的虚拟轨迹。
75.根据实施例,该方法包括根据第一参与者的多个行为的第一虚拟行为生成第一参与者的第一虚拟轨迹,其中,第一参与者的第一虚拟轨迹是第一参与者的多个虚拟轨迹中的第一个虚拟轨迹。任何交通参与者的第一虚拟行为都是无交互行为。例如,在交叉点,第一参与者可以具有在穿过交叉点时保持速度相同的第一虚拟行为(或无交互虚拟行为)。因此,根据第一参与者的第一虚拟行为(即保持速度相同或无交互虚拟行为)生成第一虚拟轨迹。
76.根据实施例,该方法包括根据相应的其它参与者的虚拟行为,为一个或多个其它参与者中的每一个参与者生成相应的其它参与者的虚拟轨迹,其中,相应的其它参与者的虚拟轨迹从相应的参与者的记录的初始位置延伸到相应的参与者的虚拟最终位置。一个或多个其它参与者中的每一个参与者的虚拟轨迹是根据一个或多个其它参与者中的每一个参与者的虚拟行为生成的。例如,在交叉点,如果相应的其它交通参与者从第一参与者占道,则根据占道的虚拟行为生成相应的其它交通参与者的虚拟轨迹。相应的其它交通参与者的虚拟轨迹从相应的参与者的记录的初始位置开始,并终止于相应的参与者的虚拟最终位置。
77.根据实施例,根据第一参与者的第一虚拟轨迹和一个或多个其它参与者中的每一个参与者的虚拟轨迹,识别一个或多个接近区域,每个接近区域是其中第一参与者与一个或多个其它参与者中的至少一个接近的时空区域。时空区域与第一参与者和一个或多个其它参与者相对于时间的空间位置相关。一个或多个接近区域也可以被称为一个或多个虚拟接近区域,因为一个或多个接近区域是使用至少两个虚拟轨迹识别(或计算)的。因此,第一参与者和一个或多个其它参与者的空间位置也可以被称为第一参与者和一个或多个其它参与者相对于时间的虚拟空间位置。这是指,在第一虚拟轨迹上的特定时刻,第一参与者与一个或多个其它参与者在虚拟空间距离上的距离。第一参与者的第一虚拟轨迹和一个或多个其它参与者中的每一个参与者的虚拟轨迹用于识别第一参与者的虚拟空间位置,第一参与者在时间上靠近一个或多个其它参与者中的至少一个。
78.根据实施例,根据相应的接近区域和相应的另一虚拟行为,为一个或多个接近区域中的每一个接近区域,以及为第一参与者的多个虚拟行为中的一个或多个其它虚拟行为中的每一个虚拟行为,生成第一参与者的另一个虚拟轨迹。例如,在交叉点,如果在靠近一个或多个其它交通参与者的虚拟空间位置识别第一参与者,则第一参与者可以表现出进一步的虚拟行为,例如第一参与者给一个或多个其它交通参与者让道,或从一个或多个其它交通参与者占道,以避免在交叉点发生虚拟碰撞。根据第一参与者的相应的进一步的虚拟行为(即让道或占道)和所识别的虚拟空间位置,生成第一参与者的进一步的虚拟轨迹。
79.根据实施例,为一个或多个其它参与者中的每一个参与者生成虚拟最终位置的方法包括根据相应的其它参与者的记录的初始位置生成相应的虚拟最终位置。根据相应的其它参与者的记录的初始位置生成相应的其它参与者的相应的虚拟最终位置,进而生成一个或多个其它参与者的虚拟最终位置。
80.根据实施例,生成相应的虚拟最终位置进一步根据包括第一参与者的记录的初始位置和其它参与者中的每一个参与者的记录的初始位置的区域的地图。根据驾驶区域的高清(high definition,hd)地图生成相应的其它参与者的相应的虚拟最终位置。原因是驾驶区域的hd地图包括第一参与者的记录的初始位置和一个或多个其它参与者中的每一个参与者的记录的初始位置。
81.根据实施例,生成相应的虚拟最终位置进一步根据交通规则信息,交通规则信息是关于适用于该区域的交通规则的信息。在一种实现方式中,hd地图包括适用于驾驶区域并用于生成相应的其它参与者的相应的虚拟最终位置的交通规则(例如,停车标志、让道规则等)。
82.根据实施例,进一步根据交通规则信息估计事故风险等级。在一种实现方式中,驾驶区域的hd地图包括用于解释第一参与者和一个或多个其它参与者的一个或多个动作并估计第一参与者的事故风险等级的交通规则(例如,停车标志、让道规则等)。
83.步骤102、104和106仅仅是说明性的,在不脱离本文权利要求的范围的情况下,还可以提供其它替代方案,其中,添加一个或多个步骤、删除一个或多个步骤,或以不同的顺序提供一个或多个步骤。
84.图2是根据本发明的实施例的工作流水线,示出了估计道路交通参与者的事故风险等级的方法的各种操作。结合图1的元件描述图2。参考图2,示出了工作流水线200,示出了用于估计道路交通参与者的事故风险等级的方法100(图1的)的各种操作。在工作流水线200中,示出了多个传感器202、驾驶场景204、碰撞驱动轨迹生成器206、记录轨迹208、轨迹匹配210、轨迹解释212和事故风险等级表示214。多个传感器202包括摄像头202a和全球导航卫星系统(global navigation satellite system,gnss)接收器202b。驾驶场景204包括多个道路交通参与者,例如第一参与者204a和一个或多个其它参与者204b-204d、道路结构204e和地理定位地标204f。事故风险等级表示214包括多个风险特征的计数,例如违反交通规则214a的计数、占道(tw)的计数214b,以及可以由第一参与者204a或一个或多个其它参与者204b-204d执行的考虑的碰撞214c的计数。
85.工作流水线200示出了方法100的各种操作,方法100根据第一参与者204a与一个或多个其它参与者204b-204d的交互和协商估计第一参与者204a的事故风险等级。
86.多个传感器202安装在第一参与者204a(例如车辆)上,以便检测和定位道路结构
204e(即道路部分)上的一个或多个其它参与者204b-204d。例如,摄像头202a可以是焦距大于90cm的大视场(field of view,fov)摄像头,用于检测道路结构204e上的大量交通参与者。在一种实现方式中,摄像头202a对应于安装在第一参与者204a的仪表板或挡风玻璃上并用于连续记录道路结构204e和一个或多个其它参与者204b-204d的视图的摄像头。在此类实现方式中,摄像头202a也可以被称为仪表板摄像头。gnss接收器202b用于通过使用高清(high-definition,hd)地图对第一参与者204a和一个或多个其它参与者204b-204d进行定位和跟踪。gnss接收器202b生成的hd地图代表道路结构204e,地理定位地标204f和道路连通性。地理定位地标204f包括交通车道和交通标志。hd地图用于对齐第一参与者204a和一个或多个其它参与者204b-204d。
87.驾驶场景204对应于语义驾驶场景,可以借助单词和句子来解释。根据从多个传感器202接收到的信息生成驾驶场景204。或者,在驾驶场景204中表示通过使用摄像头202a和gnss接收器202b检测和定位的一个或多个其它参与者204b-204d以及它们的速度信息。驾驶场景204还包括道路结构204e、地理定位地标204f以及道路连接,它们共同调节第一参与者204a和一个或多个其它参与者204b-204d的运动。一个或多个其它参与者204b-204d也可以表示为第二参与者204b、第三参与者204c和第四参与者204d。
88.轨迹生成器206生成第一参与者204a以及一个或多个其它参与者204b-204d的多个虚拟轨迹。第一参与者204a和一个或多个其它参与者204b-204d的多个虚拟轨迹取决于第一参与者204a和一个或多个其它参与者204b-204d的多个虚拟行为。轨迹生成器206可以具有树状结构,该树状结构具有父节点和多个子节点。父节点在无交互环境中存储每个道路交通参与者的虚拟行为和对应的虚拟轨迹。这是指第一参与者204a和一个或多个其它参与者204b-204d都不交互且不以恒定速度移动。例如,在一种情况下,第一参与者204a不与一个或多个其它参与者204b-204d交互或协商,并以移动恒定速度。因此,保持速度相同(ks)的虚拟行为和第一参与者204a的对应的虚拟轨迹存储在父节点中。多个子节点根据第一参与者204a与一个或多个其它参与者204b-204d的交互或协商存储多个虚拟行为(例如让道或占道)和多个虚拟轨迹。此外,轨迹生成器206为第一参与者204a的多个虚拟行为中的每一个虚拟行为以及一个或多个其它参与者204b-204d存储具有标识的意图标签。例如,对于第一参与者204a,给一个或多个其它参与者204b-204d让道(gw)的虚拟行为与标识1一起存储。轨迹生成器206也被称为轨迹生成算法。例如,在表1中进一步详细描述了轨迹生成器206。
89.记录轨迹208表示第一参与者204a所跟随的实际轨迹。第一参与者204a的实际轨迹根据速度和空间位置随时间的序列来表征。或者,第一参与者204a的实际轨迹涉及时空区域。
90.轨迹匹配210表示根据基于距离的相似性度量,从轨迹生成器206生成的多个虚拟轨迹中识别与第一参与者204a的记录轨迹208最相似的虚拟轨迹。
91.轨迹解释212包括根据匹配的虚拟轨迹与第一参与者204a的记录轨迹208之间的比较对第一参与者204a的实际动作(或行为)的自动解释。与匹配的虚拟轨迹相关联的虚拟行为被视为第一参与者204a的实际动作。此外,将第一参与者204a的实际动作与存储在hd地图上的交通规则(例如,停车标志、让道规则等)进行比较,以检测第一参与者204a的实际动作是否符合交通规则。
92.事故风险等级表示214包括根据连续收集的第一参与者204a执行的动作对多个碰撞风险特征的估计。多个碰撞风险特征包括第一参与者204a所关注的事故的数量和第一参与者204a的占道(tw)让道(gw)比率。第一参与者所关注的事故的数量对应于第一参与者204a执行动作(例如tw或gw)的事故的数量。第一参与者204a占道(tw)次数与给一个或多个其它参与者204b-204d让道的次数的比率。事故风险等级表示214还包括违反交通规则214a的计数、占道(tw)214b的计数和考虑的碰撞214c的计数,它们由第一参与者204a执行,以解释第一参与者204a的更精确的实际动作。
93.表1
[0094][0095]
行1(指令)是指识别第一参与者204a以及一个或多个其它参与者204b-204d周围的多个目标。多个目标对应于第一参与者204a周围可以驶入的道路的中心车道、第一参与者204a的多个记录的初始位置和多个记录的最终位置,以及一个或多个其它参与者204b-204d的多个记录的初始位置和多个虚拟最终位置。
[0096]
行2至行4(指令)是指为第一参与者204a以及为一个或多个其它参与者204b-204d生成初始无交互虚拟轨迹。例如,如果考虑交叉点,则第一参与者204a以及一个或多个其它参与者204b-204d的初始无交互虚拟轨迹将以恒定速度通过交叉点前进。
[0097]
行5(指令)是指道路交通参与者204a-204d的轨迹生成器206与父(或根)节点的初始化。父节点存储第一参与者204a以及一个或多个其它参与者204b-204d在移动穿过交叉点时的虚拟行为(即保持速度相同(ks))。
[0098]
行6(指令)是指根据第一参与者204a以及在交叉点的一个或多个其它参与者204b-204d的初始无交互虚拟轨迹,识别第一参与者204a与一个或多个其它参与者204b-204d的可能数量的碰撞(或事故)。
[0099]
行7至行11(指令)是指根据第一参与者204a与一个或多个其它参与者204b-204d
的识别的可能数量的碰撞(或事故),为每个参与者计算多个新的虚拟轨迹。每个参与者的多个新的虚拟轨迹是根据用于避免碰撞的多个新的虚拟行为(或意图或协商或交互)计算的。例如,在交叉点,第一参与者204a可以占道(tw)或给一个或多个其它参与者204b-204d让道(gw),以避免事故。在计算之后,第一参与者204a和一个或多个其它参与者204b-204d的多个新的虚拟轨迹(即让道轨迹或占道轨迹)和多个新虚拟行为(即让道或占道)存储在轨迹生成器206的父节点的多个子节点中。
[0100]
行12至行13(指令)是指识别第一参与者204a和一个或多个其它参与者204b-204d的多个新的虚拟轨迹之间的另一个可能数量的碰撞。在识别出其它可能数量的碰撞之后,迭代重复行7至行12,直到解决识别出的可能数量的碰撞。
[0101]
在解决所有所识别的可能数量的碰撞之后,第一参与者204a和一个或多个其它参与者204b-204d的多个最终虚拟轨迹和多个最终虚拟行为存储在轨迹生成器206中。这样,多个虚拟轨迹的生成以集中迭代的方式执行,以避免碰撞。此外,轨迹生成器206被迭代更新,其存储第一参与者204a和一个或多个其它参与者204b-204d的多个虚拟轨迹和多个虚拟行为,以避免碰撞。
[0102]
图3是根据本发明的实施例的示例性驾驶场景,示出了道路交通参与者的记录的初始位置。结合图1和图2的元件描述图3。参考图3,示出了示例性驾驶场景300,示出了道路结构204e上第一参与者204a的第一记录初始位置302a和第二参与者204b的第二记录初始位置302b。或者,第一参与者204a的第一记录初始位置302a被称为第一参与者204a的起始位置。类似地,第二参与者204b的第二记录初始位置302b被称为第二参与者204b的起始位置。第一参与者204a的第一记录初始位置302a和第二参与者204b的第二记录初始位置302b用于生成第一参与者204a的虚拟轨迹(或多个虚拟轨迹)。
[0103]
图4是根据本发明的实施例的示例性驾驶场景,示出了道路交通参与者的最终位置。结合图1、图2和图3的元件描述图4。参考图4,出了示例性驾驶场景400,示出了第一参与者204a的记录的最终位置402a和402b以及第二参与者204b的虚拟最终位置404a和404b。在一个示例中,第二参与者204b的虚拟最终位置404a和404b是指可能的假设未来位置或可能的未来目的地等。
[0104]
图5a是根据本发明的实施例的示例性驾驶场景,示出了道路交通参与者的多个虚拟轨迹。结合图1、图2、图3和图4的元件描述图5a。参考图5a,示出了示例性驾驶场景500a,示出了第一参与者204a的第一多个虚拟轨迹502a和502b以及第二参与者204b的第二多个虚拟轨迹504a和504b。第一多个虚拟轨迹502a和502b是根据第一参与者204a的第一记录初始位置302a、第一参与者204a的记录的最终位置402a和402b以及第二参与者204b的第二记录初始位置302b生成的。类似地,第二多个虚拟轨迹504a和504b是根据第二参与者204b的第二记录初始位置302b、第二参与者204b的虚拟最终位置404a和404b以及第一参与者204a的第一记录初始位置302a生成的。第一多个虚拟轨迹502a和502b以及第二多个虚拟轨迹504a和504b分别取决于第一参与者204a和第二参与者204b的多个虚拟行为。
[0105]
图5b是根据本发明的实施例的第一参与者在时空区域中的无交互运动规划的图形表示。结合图1、图2、图3、图4和图5a的元件描述图5b。参考图5b,示出了第一参与者204a(图2的)在时空区域中的无交互运动规划的图形表示500b。图形表示500b包括表示以秒(s)为单位的时间值的x轴506a和表示以米(m)为单位的距离值的y轴508a。
[0106]
在图形表示500b中,第一线510a表示第一参与者204a在时空区域中的无交互运动规划。时空区域与第一参与者204a在不同时刻的各种空间位置相关。第一参与者204a的无交互运动规划是指第一参与者204a不与一个或多个其它交通参与者(例如第二参与者204b)交互或协商。第一参与者204a的无交互运动规划对应于基于虚拟行为的虚拟轨迹(基于虚拟行为),因此,第一参与者204a不与一个或多个其它交通参与者(例如第二参与者204b)交互或协商。
[0107]
图5c是根据本发明的实施例的第二参与者在时空区域中的无交互运动规划的图形表示。结合图1、图2、图3、图4、图5a和图5b的元件描述图5c。参考图5c,示出了第二参与者204b(图2的)在时空区域中的无交互运动规划的图形表示500c。图形表示500c包括表示以秒(s)为单位的时间值的x轴506b和表示以米(m)为单位的距离值的y轴508b。
[0108]
在图形表示500c中,第一线510b表示第二参与者204b在时空区域中的无交互运动规划。时空区域与第二参与者204b在不同时刻的各种空间位置相关。第二参与者204b的无交互运动规划是指第二参与者204b不与第一参与者204a交互或协商。第二参与者204b的无交互运动规划对应于基于虚拟行为的虚拟轨迹(基于虚拟行为),因此,第二参与者204b不与第一参与者204a交互或协商。
[0109]
图5d是根据本发明的实施例的场景,示出了道路交通参与者的轨迹生成器。结合图1、图2、图3、图4、图5a、图5b和图5c的元件描述图5d。参考图5d,示出了场景500d,包括第一参与者204a的第一轨迹生成器511a和第二参与者204b的第二轨迹生成器511b。还示出了第一轨迹生成器511a的第一父节点512和第二轨迹生成器511b的另一个第一父节点514。
[0110]
第一轨迹生成器511a的第一父节点512与第一参与者204a相关,并存储多个虚拟行为、第一多个虚拟轨迹502a和502b、第一参与者204a的速度曲线和空间路径。类似地,第二轨迹生成器511b的另一个第一父节点514与第二参与者204b相关,并存储多个虚拟行为、第二多个虚拟轨迹504a和504b、第二参与者204b的速度曲线和空间路径。例如,在交叉点,第一参与者204a和第二参与者204b不协商或交互,并以相同的速度向前移动。在这种情况下,第一父节点512在根级别存储保持第一参与者204a的速度相同(ks)的虚拟行为。类似地,另一个第一父节点514在根级别存储第二参与者204b的保持速度相同(ks)的虚拟行为。第一轨迹生成器511a和第二轨迹生成器511b分别对应于具有第一父节点512和另一个第一父节点514的树状结构。
[0111]
图6a是根据本发明的实施例的示例性驾驶场景,示出了道路交通参与者发生碰撞。结合图1、图2、图3、图4和图5a的元件描述图6a。参考图6a,示出了示例性驾驶场景600a,示出了第一参与者204a和第二参与者204b在t交叉点碰撞602。
[0112]
在驾驶场景600a中,第一参与者204a跟随第一多个虚拟轨迹502a和502b(图5a的)中的第一轨迹502a。类似地,第二参与者204b跟随第二多个虚拟轨迹504a和504b(图5a的)中的第一虚拟轨迹504a。第一参与者204a和第二参与者204b不交互或协商,并以相同速度跟随它们相应的虚拟轨迹,这导致在t交叉点发生碰撞602。在另一种情况下,第一参与者204a跟随第一多个虚拟轨迹502a和502b(图5a的)的第二轨迹502b。第二参与者204b跟随第二多个虚拟轨迹504a和504b(图5a的)中的第一虚拟轨迹504a。第一参与者204a和第二参与者204b不交互或协商,并以相同速度跟随它们相应的虚拟轨迹,这也导致在t交叉点发生碰撞602。
[0113]
图6b是根据本发明的另一个实施例的场景,示出了道路交通参与者的轨迹生成器。结合图1、图2、图3、图4、图5a、5d和图6a的元件描述图6b。参考图6b,示出了场景600b,包括第一参与者204a的第一轨迹生成器603a和第二参与者204b的第二轨迹生成器603b。还示出了与第一父节点512和另一个第一父节点514相关联的碰撞602。
[0114]
碰撞602存储在第一参与者204a的第一父节点512中,并且还存储在第二参与者204b的另一个第一父节点514中。碰撞602是由于第一参与者204a和第二参与者204b在t交叉点的虚拟行为(即保持速度相同(ks))而发生的。第一参与者204a和第二参与者204b可以通过交互或协商来避免碰撞602,这在图7a至图7g中详细描述。
[0115]
图7a是根据本发明的实施例的示出用于避免碰撞的道路交通参与者的多个虚拟轨迹的示例性驾驶场景。结合图1、图2、图3、图4、图5a和图6a的元件描述图7a。参考图7a,示出了示例性驾驶场景700a,示出了第一参与者204a的第一虚拟轨迹702a和第二参与者204b的第二虚拟轨迹704a。
[0116]
第一参与者204a的第一虚拟轨迹702a和第二参与者204b的第二虚拟轨迹704a是根据第一参与者204a和第二参与者204b的多个虚拟行为计算的,跟随这些虚拟轨迹以避免碰撞602。在一个示例中,在t交叉点(图6a的),第一参与者204a给第二参与者204b让道(gw),并跟随第一虚拟轨迹702a。因此,第二参与者204b从第一参与者204a占道(tw),并跟随第二虚拟轨迹704a。这样,根据第一参与者204a的gw和第二参与者204b的tw的虚拟行为,避免了碰撞602。例如,图7b中详细描述了根据第一参与者204a的gw和第二参与者204b的tw的虚拟行为的轨迹生成器。在另一个示例中,在t交叉点(图6a的),第一参与者204a从第二参与者204b占道(tw),并跟随第一虚拟轨迹702a。因此,第二参与者204b给第一参与者204a让道(gw),并跟随第二虚拟轨迹704a。这样,根据第一参与者204a的tw和第二参与者204b的gw的虚拟行为,避免了碰撞602。例如,图7c中详细描述了根据第一参与者204a的tw和第二参与者204b的gw的虚拟行为的轨迹生成器。这样,根据第一参与者204a和第二参与者204b的多个虚拟行为(即gw或tw)避免碰撞602。
[0117]
图7b是根据本发明的实施例的场景,示出了避免道路交通参与者碰撞发生轨迹生成器。结合图1、图2、图3、图4、图5d、图6a、图6b和图7a的元件描述图7b。参考图7b,示出了场景700b,包括第一轨迹生成器705a和第二轨迹生成器705b。第一轨迹生成器705a和第二轨迹生成器705b避免了第一参与者204a和第二参与者204b发生碰撞602。还示出了第一轨迹生成器705a的第一父节点512的第一子节点706a和第二轨迹生成器705b的另一个第一父节点514的第一子节点708a。
[0118]
第一子节点706a基于第一参与者204a用于避免碰撞602的虚拟行为(即让道(gw))。因此,第一父节点512的第一子节点706a存储第一参与者204a的gw的虚拟行为以及第一虚拟轨迹702a。类似地,另一个第一父节点514的第一子节点708a基于第二参与者204b用于避免碰撞602的虚拟行为(即占道(tw))。因此,另一个第一父节点514的第一子节点708a存储第二参与者204b的tw的虚拟行为以及第二虚拟轨迹704a。
[0119]
图7c是根据本发明的另一个实施例的场景,示出避免道路交通参与者发生碰撞的轨迹生成器。结合图1、图2、图3、图4、图5d、图6a、图6b、图7a和图7b的元件描述图7c。参考图7c,示出了场景700c,包括第一轨迹生成器707a和第二轨迹生成器707b。第一轨迹生成器707a和第二轨迹生成器707b避免了第一参与者204a和第二参与者204b发生碰撞。还示出了
第一父节点512的另一个第一子节点706b和另一个第一父节点514的另一个第一子节点708b。
[0120]
另一个第一子节点706b基于第一参与者204a用于避免碰撞602的虚拟行为(即占道(tw))。因此,第一父节点512的另一个第一子节点706b存储第一参与者204a的tw的虚拟行为以及第一虚拟轨迹702a。类似地,另一个第一父节点514的另一个第一子节点708b基于第二参与者204b用于避免碰撞602的虚拟行为(即让道(gw))。因此,另一个第一父节点514的另一个第一子节点708b存储第二参与者204b的gw的虚拟行为以及第二虚拟轨迹704a。
[0121]
图7d是根据本发明的实施例的第一参与者基于让道的虚拟行为的运动规划的图形表示。结合图1、图2、图3、图4、图5d、图6a、图6b、图7a和图7b的元件描述图7d。参考图7d,示出了第一参与者204a(图2的)基于让道的虚拟行为的运动规划的图形表示700d。图形表示700d包括表示以秒(s)为单位的时间值的x轴710a和表示以米(m)为单位的距离值的y轴712a。
[0122]
在图形表示700d中,第一线714a表示第一参与者204a基于以下虚拟行为的速度曲线:在t交叉点718给第二参与者204b让道以避免碰撞602。第二线716a表示第二参与者204b在t交叉点718占道以避免碰撞602。
[0123]
图7e是根据本发明的实施例的第二参与者基于占道的虚拟行为的运动规划的图形表示。结合图1、图2、图3、图4、图5d、图6a、图6b、图7a、图7b和图7d的元件描述图7e。参考图7e,示出了第二参与者204b(图2的)基于占道的虚拟行为的运动规划的图形表示700e。图形表示700e包括表示以秒(s)为单位的时间值的x轴710b和表示以米(m)为单位的距离值的y轴712b。
[0124]
在图形表示700e中,第一线716b表示第二参与者204b基于以下虚拟行为的速度曲线:在t交叉点718从第一参与者204a占道以避免碰撞602。第二线714b表示第一参与者204a在t交叉点718让道以避免碰撞602。
[0125]
图7f是根据本发明的实施例的第一参与者基于占道的虚拟行为的运动规划的图形表示。结合图1、图2、图3、图4、图5d、图6a、图6b、图7a和图7c的元件描述图7f。参考图7f,示出了第一参与者204a(图2的)基于占道的虚拟行为的运动规划的图形表示700f。图形表示700f包括表示以秒(s)为单位的时间值的x轴710c和表示以米(m)为单位的距离值的y轴712c。
[0126]
在图形表示700f中,第一线714c表示第一参与者204a基于以下虚拟行为的速度曲线:在t交叉点718从第二参与者204b占道以避免碰撞602。第二线716c表示第二参与者204b在t交叉点718让道以避免碰撞602。
[0127]
图7g是根据本发明的实施例的第二参与者基于让道的虚拟行为的运动规划的图形表示。结合图1、图2、图3、图4、图5d、图6a、图6b、图7a、图7c和图7f的元件描述图7g。参考图7g,示出了第二参与者204b(图2的)基于让道的虚拟行为的运动规划的图形表示700g。图形表示700g包括表示以秒(s)为单位的时间值的x轴710d和表示以米(m)为单位的距离值的y轴712d。
[0128]
在图形表示700g中,第一线716d表示第二参与者204b基于以下虚拟行为的速度曲线:在t交叉点718给第一参与者204a让道以避免碰撞602。第二线714d表示第一参与者204a在t交叉点718占道以避免碰撞602。
[0129]
图8a是根据本发明的又一个实施例的示例性驾驶场景,示出道路交通参与者发生碰撞。结合图1、图2、图3、图4、图5a、图6a和图7a的元件描述图8a。参考图8a,示出了包括第三参与者204c的示例性驾驶场景800a。还示出了第三参与者204c的第三记录初始位置802、第三虚拟最终位置804和第三虚拟轨迹806。还示出了第一参与者204a与第三参与者204c发生碰撞808。
[0130]
第三记录初始位置802被称为第三参与者204c的起始位置,类似地,第三虚拟最终位置804被称为可能的假设未来位置或可能的未来目的地等。在驾驶场景800a中,第三参与者204c根据从第三记录初始位置802到第三虚拟最终位置804的保持速度相同(ks)的虚拟行为跟随第三虚拟轨迹806,并且不与第一参与者204a协商。因此,第三参与者204c在轨迹点与第一参与者204a发生碰撞808。
[0131]
图8b是根据本发明的又一个实施例的场景,示出了道路交通参与者的轨迹生成器。结合图1、图2、图3、图4、图5d、图6a、图6b、图7a、图7b、图7c和图8a的元件描述图8b。参考图8b,示出了场景800b,包括第一参与者204a的第一轨迹生成器707a、第二参与者204b的第二轨迹生成器707b和第三参与者204c的第三轨迹生成器809a。还示出了第三参与者204c的第三轨迹生成器809a的父节点810。
[0132]
父节点810与第三参与者204c相关,并存储第三参与者204c的多个虚拟行为、第三虚拟轨迹806、速度曲线和空间路径。例如,在轨迹点,第三参与者204c不与第一参与者204a协商或交互,并以相同的速度向前移动。在这种情况下,第三轨迹生成器809a的父节点810在根级别存储第三参与者204c的保持速度相同(ks)的虚拟行为。
[0133]
图8c是根据本发明的又一个实施例的避免道路交通参与者发生碰撞的示例性驾驶场景。结合图1、图2、图3、图4、图5a、图6a、图7a和图8a的元件描述图8c。参考图8c,示出了包括第三参与者204c的第四虚拟轨迹812的示例性驾驶场景800c。
[0134]
第三参与者204c的第四虚拟轨迹812是根据用于避免碰撞808的第一参与者204a和第三参与者204c的多个虚拟行为计算的。第一参与者204a和第三参与者204c可以通过交互或协商来避免碰撞。在一个示例中,在轨迹点(图8a的),第一参与者204a给第三参与者204c让道(gw),并跟随第一虚拟轨迹702a。因此,第三参与者204c从第一参与者204a占道(tw),并跟随第四虚拟轨迹812。这样,根据第一参与者204a让道且第三参与者204c占道的虚拟行为,避免了碰撞808。例如,在图8e中详细描述了根据第一参与者204a让道且第三参与者204c占道的虚拟行为的轨迹生成器。在另一个示例中,在轨迹点(图8a的),第一参与者204a从第三参与者204c占道(tw),并跟随第一虚拟轨迹702a。因此,第三参与者204c给第一参与者204a让道(gw),并跟随第四虚拟轨迹812。这样,根据第一参与者204a占道和第三参与者204c让道的虚拟行为,避免了碰撞808。例如,在图8d中详细描述了根据第一参与者204a占道(即tw)且第三参与者204c让道的虚拟行为的轨迹生成器。这样,根据第一参与者204a和第三参与者204c的多个虚拟行为(即让道或占道)避免碰撞808。
[0135]
图8d是根据本发明的实施例的场景,示出了避免道路交通参与者发生碰撞的轨迹生成器。结合图1、图2、图3、图4、图5d、图6a、图6b、图7a、图8a、图8b和图8c的元件描述图8d。参考图8d,示出了场景800d,包括第一参与者204a的第一轨迹生成器813a、第二参与者204b的第二轨迹生成器813b和第三参与者204c的第三轨迹生成器813c。还示出了第一轨迹生成器813a的第一父节点512的第一子子节点814a和第三轨迹生成器813c的父节点810的第一
子节点816a。第二轨迹生成器813b对应于第二参与者204b的第二轨迹生成器707b(图7c的)。
[0136]
第一子子节点814a基于第一参与者204a用于避免碰撞808的占道(tw)的虚拟行为。因此,第一父节点512的第一子节点706a的第一子子节点814a存储第一参与者204a的tw的虚拟行为以及第一虚拟轨迹702。类似地,父节点810的第一子节点816a基于第三参与者204c用于避免碰撞808的占道(gw)的虚拟行为。因此,父节点810的第一子节点816a存储第三参与者204c的gw的虚拟行为以及第四虚拟轨迹812。
[0137]
图8e是根据本发明的又一实施例的场景,示出了避免道路交通参与者发生碰撞的轨迹生成器。结合图1、图2、图3、图4、图5d、图6a、图6b、图7a、图8a、图8b、图8c和图8d的元件描述图8e。参考图8e,示出了场景800e,包括第一参与者204a的第一轨迹生成器815a、第二参与者204b的第二轨迹生成器815b和第三参与者204c的第三轨迹生成器815c。还示出了第一轨迹生成器815a的第一父节点512的另一个第一子子节点814b和第三轨迹生成器815c的父节点810的另一个第一子节点816b。第二轨迹生成器815b对应于第二参与者204b的第二轨迹生成器707b(图7c的)。
[0138]
另一个第一子子节点814b基于第一参与者204a让道(gw)以避免碰撞808的虚拟行为。因此,第一子节点706a的另一个第一子子节点814b存储第一参与者204a的让道的虚拟行为以及第一虚拟轨迹702a。类似地,父节点810的另一个第一子节点816b基于第三参与者204c占道(tw)以避免碰撞808的虚拟行为。因此,父节点810的另一个第一子节点816b存储第三参与者204c的占道的虚拟行为以及第四虚拟轨迹812。
[0139]
图8f是根据本发明的又一实施例的场景,示出了避免道路交通参与者发生碰撞的轨迹生成器。结合图1、图2、图3、图4、图5d、图6a、图6b、图7a、图8a、图8b、图8c、图8d和图8e的元件描述图8f。参考图8f,示出了场景800f,包括第一参与者204a的第一轨迹生成器817a、第二参与者204b的第二轨迹生成器817b和第三参与者204c的第三轨迹生成器817c。
[0140]
第一轨迹生成器817a、第二轨迹生成器817b和第三轨迹生成器817c中的每一个轨迹生成器分别存储第一参与者204a、第二参与者204b和第三参与者204c中的每一个参与者的多个虚拟行为和多个虚拟轨迹。例如,在第一参与者204a的第一轨迹生成器817a中,第一父节点512存储保持第一参与者204a和虚拟轨迹502a的速度相同的虚拟行为。第一子节点706a存储第一参与者204a的让道的虚拟行为和第一虚拟轨迹702a,以避免与第二参与者204b发生碰撞602。第一子子节点814a存储第一参与者204a占道的虚拟行为和第一虚拟轨迹702a,以避免与第三参与者204c发生碰撞808。第一参与者204a的第一轨迹生成器817a避免了与第二参与者204b的碰撞602(图6a的)以及与第三参与者204c发生碰撞808。第二参与者204b的第二轨迹生成器817b避免了(图6a的)与第一参与者204a发生碰撞602。第三参与者204c的第三轨迹生成器817c避免了与第一参与者204a发生碰撞808。
[0141]
图8g是根据本发明的实施例的道路交通参与者的运动规划的图形表示。结合图1、图2、图3、图4、图5d、图6a、图6b、图7a、图8a、图8b、图8c、图8d、图8e和图8f的元件描述图8g。参考图8g,示出了道路交通参与者(例如第一参与者204a、第二参与者204b和第三参与者204c)在时空区域中的运动规划的图形表示800g。图形表示800g包括表示以秒(s)为单位的时间值的x轴818a和表示以米(m)为单位的距离值的y轴820a。
[0142]
在图形表示800g中,第一线822a表示第一参与者204a基于以下虚拟行为的速度曲
线:在t交叉点828a给第二参与者204b让道以避免碰撞602,在轨迹点830a从第三参与者204c占道以避免碰撞808。第二线824a表示第二参与者204b在t交叉点828a从第一参与者204a占道以避免碰撞602。第三线826a表示第三参与者204c在轨迹点830a给第一参与者204a让道以避免碰撞808。
[0143]
图8h是根据本发明的实施例的道路交通参与者的运动规划的图形表示。结合图1、图2、图3、图4、图5d、图6a、图6b、图7a、图8a、图8b、图8c、图8d、图8e、图8f和图8g的元件描述图8h。参考图8h,示出了道路交通参与者(例如第一参与者204a、第二参与者204b和第三参与者204c)在时空区域中的运动规划的图形表示800h。图形表示800h包括表示以秒(s)为单位的时间值的x轴818b和表示以米(m)为单位的距离值的y轴820b。
[0144]
在图形表示800h中,第一线822b表示第一参与者204a基于以下虚拟行为的速度曲线:在t交叉点828b给第二参与者204b让道以避免碰撞602,在轨迹点830b给第三参与者204c让道以避免碰撞808。第二线824b表示第二参与者204b在t交叉点828b从第一参与者204a占道以避免碰撞602。第三线826b表示第三参与者204c在轨迹点830b从第一参与者204a占道以避免碰撞808。
[0145]
图9a是根据本发明的又一个实施例的示例性驾驶场景,示出了道路交通参与者发生碰撞。结合图1、图2、图3、图4、图5a、图6a、图7a、图8a和图8c的元件描述图9a。参考图9a,示出了包括第四参与者204d的示例性驾驶场景900a。还示出了第四参与者204d的第四记录初始位置902a、第四虚拟最终位置902b和第四虚拟轨迹904。还示出了第一参与者204a与第四参与者204d发生碰撞906。
[0146]
第四记录初始位置902a被称为第四参与者204d的起始位置,类似地,第四虚拟最终位置902b被称为可能的假设未来位置或可能的未来目的地等。在驾驶场景900a中,第四参与者204d根据从第四记录初始位置902a到第四虚拟最终位置902b的保持速度相同(ks)的虚拟行为跟随第四虚拟轨迹904,并且不与第一参与者204a协商。因此,第四参与者204d在另一个轨迹点与第一参与者204a发生碰撞906。
[0147]
图9b是根据本发明的实施例的场景,示出了道路交通参与者的轨迹生成器。结合图1、图2、图3、图4、图5d、图6a、图6b、图7a、图7b、图7c、图8a、图8c和图9a的元件描述图9b。参考图9b,示出了包括第一参与者204a的轨迹生成器907的场景900b。还示出了轨迹生成器907的第一父节点512的第二子子节点908。
[0148]
第二子子节点908存储第一参与者204a的自适应巡航控制(adaptive cruise control,acc)的虚拟行为。由于自适应巡航控制的虚拟行为,第一参与者204a减速以避免与第四参与者204d发生碰撞906,且在第四虚拟轨迹904上跟随第四参与者204d。因此,轨迹生成器907的第一父节点512的第一子节点706a的第一子子节点814的第二子子节点908存储第一参与者204a的自适应巡航控制(adaptive cruise control,acc)的虚拟行为。
[0149]
图9c是根据本发明的实施例的道路交通参与者的运动规划的图形表示。结合图1、图2、图3、图4、图5d、图6a、图6b、图7a、图7b、图7c、图8a、图8c、图9a和图9b的元件描述图9c。参考图9c,示出了道路交通参与者(例如第一参与者204a、第二参与者204b、第三参与者204c和第四参与者204d)在时空区域中的运动规划的图形表示900c。图形表示900c包括表示以秒(s)为单位的时间值的x轴910和表示以米(m)为单位的距离值的y轴912。
[0150]
在图形表示900c中,第一线914a表示第一参与者204a基于以下虚拟行为的速度曲
线:在t交叉点916a给第二参与者204b让道以避免发生碰撞602,在轨迹点916b从第三参与者204c占道以避免发生碰撞808,最后在自适应巡航控制(adaptive cruise control,acc)上避免在轨迹点916c与第四参与者204d发生碰撞906。第二线914b表示第二参与者204b在t交叉点916a从第一参与者204a占道以避免碰撞602。第三线914c表示第三参与者204c在轨迹点916b给第一参与者204a让道以避免碰撞808。第四线914d表示第四参与者204d在轨迹点916c保持速度相同。此外,在轨迹点916c,第一参与者204a由于自适应巡航控制的虚拟行为而减速,以避免与第四参与者204d发生碰撞906,且在第四虚拟轨迹904上跟随第四参与者204d。
[0151]
图9d是根据本发明的实施例的第一参与者的碰撞风险特征的计数的图形表示。结合图1、图2、图9a、图9b和图9c的元件描述图9d。参考图9d,示出了第一参与者204a的碰撞风险特征的计数的图形表示900d。图形表示900d包括表示第一参与者204a的多个碰撞风险特征的x轴918和表示第一参与者204a的多个碰撞风险特征的计数的y轴920。
[0152]
在示例性实现方式中,总体事故风险等级与第一参与者204a的虚拟行为和对应的虚拟轨迹相关联。因此,总体事故风险等级取决于多个碰撞风险特征的计数,例如第一参与者204a每行驶100公里违反交通规则922a的次数的计数(例如1)、第一参与者204a执行的占道(tw)922b的计数(例如1)和事故922c的计数(例如3)。根据第一参与者204a执行的记录轨迹(即实际动作)更新总体事故风险等级,其中,总体事故风险等级是通过线性组合与第一参与者204a相关联的所有事故风险等级而获得的。在一个示例中,总体事故风险等级(即碰撞风险值)、每个事故风险等级相对于总体事故风险等级的平均群体进行标准化,这是在汽车保险提供商通常可用的杠杆大数据集中执行的。
[0153]
图10a是根据本发明的实施例的第一参与者在空间路径方面的轨迹匹配的图形表示。结合图1、图2、图8a至图8h的元件描述图10a。参考图10a,示出了第一参与者204a(图2a的)在空间路径方面的轨迹匹配的图形表示1000a。图形表示1000a包括第一参与者204a在空间路径区域中的记录轨迹1002a、虚拟轨迹1002b和匹配曲线1004。
[0154]
记录轨迹1002a对应于第一参与者204a执行的实际轨迹。虚拟轨迹1002b对应于通过使用轨迹生成器(例如轨迹生成器817a)生成的多个虚拟轨迹中的一个轨迹。匹配曲线1004用于找到多个虚拟轨迹中与记录轨迹1002a最相似的一个轨迹(例如虚拟轨迹1002b)。匹配曲线1004表示记录轨迹1002a与第一参与者204a的虚拟轨迹1002b匹配的程度。根据基于距离的相似性度量执行记录轨迹1002a和虚拟轨迹1002b之间的匹配。根据记录轨迹1002a和虚拟轨迹1002b之间的匹配,可以自动解释第一参与者204a的实际动作。
[0155]
图10b是根据本发明的实施例的第一参与者在时空区域中的轨迹匹配的图形表示。结合图1、图2、图8a至图8h和图10a的元件描述图10b。参考图10b,示出了第一参与者204a(图2a的)在时空区域中的轨迹匹配的图形表示1000b。图形表示1000b包括记录的速度曲线1006a、虚拟速度曲线1006b、另一个匹配曲线1008和第一参与者的相关分数1010。
[0156]
记录的速度曲线1006a对应于第一参与者204a的实际速度曲线(即相对于时间的空间位置)。记录的速度曲线1006a基于第一参与者204a的记录轨迹1002a。虚拟速度曲线1006b基于第一参与者204a的虚拟轨迹1002b。虚拟速度曲线1006b还基于第一参与者204a的多个虚拟行为(例如让道、占道等)。另一个匹配曲线1008用于找到多个虚拟速度曲线中与记录的速度曲线1006a最相似的速度曲线(例如虚拟速度曲线1006b)。另一个匹配曲线
1008表示记录的速度曲线1006a与第一参与者204a的虚拟速度曲线1006b的匹配程度。根据记录的速度曲线1006a和第一参与者204a的虚拟速度曲线1006b之间的匹配,生成相关分数1010。相关分数1010可以用于自动解释第一参与者204a的实际动作。
[0157]
图10c是根据本发明的实施例的第一参与者在空间路径区域中的匹配分数的图形表示。结合图1、图2、图8a至图8h、图10a和图10b的元件描述图10c。参考图10c,示出了第一参与者204a在空间路径区域中的匹配分数1012的图形表示1000c。匹配分数1012是通过在每个时间步长(例如每1秒)从第一参与者204a的记录轨迹1002a中采集样本而获得的。将记录轨迹1002a的采样时刻的坐标与第一参与者204a的多个虚拟轨迹的采样时刻进行比较。根据比较,选择多个虚拟轨迹中与记录轨迹1002a具有最低距离的一个虚拟轨迹(例如虚拟轨迹1002b)。所选择的虚拟轨迹具有与第一参与者204a的记录轨迹1002a的最高匹配分数。
[0158]
图10d是根据本发明的实施例的第一参与者在时空区域中的匹配分数的图形表示。结合图1、图2、图8a至图8h、图10a、图10b和图10c的元件描述图10c。参考图10d,示出了第一参与者204a在时空区域中的匹配分数1014的图形表示1000d。匹配分数1014是通过在每个时间步长(例如每1秒)从第一参与者204a的记录的速度曲线1006a中采集样本而获得的。将记录的速度曲线1006a的采样时刻的坐标与第一参与者204a的多个虚拟速度曲线的采样时刻进行比较。根据比较,选择多个虚拟速度曲线中与记录的速度曲线1006a具有最低距离的虚拟速度曲线(例如虚拟速度曲线1006b)。所选择的虚拟速度曲线具有与第一参与者204a的记录的速度曲线1006a的最高匹配分数。记录的速度曲线1006a和虚拟速度曲线(例如虚拟速度曲线1006b)之间的最低距离通过使用以下公式(公式1)计算:
[0159][0160]
其中,
[0161]
d=距离(cm);
[0162]
t=时间(秒);
[0163]
p
gt
=第一参与者204a的记录轨迹
[0164]
p
generated
=第一参与者204a的虚拟轨迹。
[0165]
图11a是根据本发明的实施例的具有多个交通参与者和一个服务器的系统的网络环境图。结合图1和图2的元件描述图11a。参考图11a,示出了包括多个交通参与者1102、一个服务器1104和一个通信网络1106的系统1100a的网络环境。多个交通参与者1102包括一个第一参与者1102a和一个或多个其它参与者1102b-1102n。
[0166]
第一参与者1102a和一个或多个其它参与者1102b-1102n对应于图2的第一参与者204a和一个或多个其它参与者204b-204d。在一种实现方式中,多个交通参与者1102中的每一个参与者对应于非自动驾驶车辆(例如人驾驶车辆)。非自动驾驶车辆是指两轮车辆或更多个轮的车辆。一个或多个其它参与者1102b-1102n还包括行人。在另一种实现方式中,多个交通参与者1102中的每一个参与者对应于自动驾驶车辆(例如机器人车辆或无人驾驶车辆)。在又一种实现方式中,多个交通参与者1102中的每一个参与者都对应于半自动驾驶车辆。
[0167]
服务器1104包括适当的逻辑、电路、接口和/或代码,用于通过通信网络1106从多个交通参与者1102接收多个碰撞风险更新。服务器1104位于汽车保险提供商的一侧。接收
circuit,i2c)、设备间总线(inter equipment bus,iebus)、汽车工程师协会(society of automotive engineers,sae)j1708、sae j1939、国际标准化组织(international organization for standardization,iso)11992、iso 11783、面向媒体的系统传输(media oriented systems transport,most)、most25、most50、most150、塑胶光纤(plastic optical fiber,pof)、电力线通信(power-line communication,plc)、串行外设接口(serial peripheral interface,spi)总线和/或本地互连网络(local interconnect network,lin)。
[0174]
轨迹规划器1111包括适当的逻辑、电路和/或接口,用于生成并存储多个交通参与者1102中的每一个参与者的多个虚拟轨迹。轨迹规划器1111通信地耦合到电子控制单元1108。轨迹规划器1111的示例包括但不限于计算设备、微处理器、微控制器、中央处理器(central processing unit,cpu)、图形处理单元(graphics processing unit,gpu)、状态机和/或其它处理器或电路。
[0175]
显示器1112是指用于向第一参与者1102a显示不同类型的信息的显示屏。显示器1112可以指触摸屏显示器。显示器1112通信地耦合到微处理器1108a。显示器1112的示例可以包括但不限于平视显示器(heads-up display,hud)或具有增强现实系统(head-up display with an augmented reality system,ar-hud)的平视显示器、驾驶员信息控制台(driver information console,dic)、基于投影的显示器、头部单元的显示器、透视显示器、智能玻璃显示器和/或电致变色显示器。ar-hud可以是基于合路器的ar-hud。显示器1112可以是透明显示器或半透明显示器。
[0176]
电力系统1114用于为第一参与者1102a的各个部件提供电源备份。在一个示例中,第一参与者1102a是自动驾驶车辆,电力系统1114用于为第一参与者1102a的各种部件提供所需的电压。电力系统1114对应于电力电子设备,并且可以包括通信耦合(由虚线示出)到电子控制单元1108的微控制器。电力系统1114还通信地耦合到车载网络1110。
[0177]
动力系控制系统1116用于控制第一参与者1102a的点火、燃料喷射和/或燃料排放。
[0178]
多个传感器1118对应于图2的多个传感器202。类似地,摄像头1118a和gnss接收器1118b分别对应于摄像头202a和gnss接收器202b。
[0179]
本领域普通技术人员应理解,第一参与者1102a还可以包括其它合适的传感器、部件或系统,例如音频/视频接口,但为了简洁起见,本文不对其进行描述。
[0180]
在操作中,轨迹规划器1111用于估计道路交通参与者的事故风险等级。所述道路交通参与者是多个道路交通参与者中的第一参与者。所述多个道路交通参与者包括所述第一参与者和一个或多个其它参与者。为了估计第一参与者的事故风险等级,轨迹规划器1111用于根据以下各项生成第一参与者的多个虚拟轨迹:第一参与者的记录的初始位置、第一参与者的记录的最终位置以及一个或多个其它参与者中的每一个参与者的记录的初始位置。第一参与者的每个虚拟轨迹从第一参与者的记录的初始位置延伸到第一参与者的记录的最终位置。第一参与者的多个虚拟轨迹与第一参与者的多个虚拟行为一对一关联。轨迹规划器1111还用于在所述第一参与者的所述多个虚拟轨迹中识别与所述第一参与者的记录轨迹最相似的虚拟轨迹,所述第一参与者的所述记录轨迹从所述第一参与者的所述记录的初始位置延伸到所述记录的最终位置。轨迹规划器1111还用于根据与所表识别的虚
memory,rom)、硬盘驱动器(hard disk drive,hdd)、闪存、安全数字(secure digital,sd)卡、固态硬盘(solid-state drive,ssd)和/或cpu缓存内存。
[0184]
图12是根据本发明的实施例的第一参与者的标准化风险特征的计算的示例性实现方式。结合图1、图2、图11a、图11b和图11c的元件描述图12。参考图12,示出了第一参与者204a的标准化风险特征的计算的示例性实现方式1200。示例性实现方式1200包括事故风险评估器1202、tw/gw比率1204、违反交通规则1206、所关注的事故的数量1208和多个群体风险特征1210。进一步示出了总体事故风险1212。
[0185]
事故风险评估器1202评估总体事故风险1212。总体事故风险1212也可以被称为第一参与者204a的碰撞风险。通过使用公式(公式2和公式3),根据碰撞风险特征来评估总体事故风险1212,碰撞风险特征为tw/gw比率1204、违反交通规则的次数1206、所关注的事故的数量1208以及第一参与者204a的多个群体风险特征1210等。
[0186][0187][0188]
其中,
[0189]
rf
norm
=第一参与者204a的标准化风险特征,
[0190]
rf
user
=第一参与者204a的碰撞风险特征,
[0191]
rf
popluation
=第一参与者204a的群体风险特征,
[0192]
cr=第一参与者204a的碰撞风险,
[0193]
α0tw
norm
=占道(tw)的计数
[0194]
α1btr/km
norm
=违反交通规则的计数
[0195]
α2ncollision
norm
=所关注的碰撞的计数
[0196]
第一参与者204a的记录轨迹与虚拟轨迹的匹配提供了碰撞风险特征,例如tw/gw比率1204、违反交通规则1206的次数、所关注的事故的数量1208,使用这些碰撞风险特征并使用公式2和公式3推导第一参与者204a的碰撞风险(collision risk,cr)。
[0197]
在另一种实现方式中,第一参与者204a的碰撞风险可以通过将第一参与者204a的碰撞风险特征(或特定风险特征)与一个或多个其它参与者204b-204d的碰撞风险特征(或特定风险特征)进行比较来计算。例如,如果第一参与者204a被识别出经常在交叉点占道(这会导致tw/gw比率较大),同时违反让行交通规则(这会导致tr指数较大),则第一参与者204a的碰撞风险会使值较大,并且第一参与者204a的驾驶风格被认为是非常危险的。
[0198]
许多其它技术实现方式和实际应用可以估计第一参与者1102a与一个或多个其它参与者1102b-1102n的事故风险等级。在一个示例中,一旦估计了准确的事故风险等级,车辆中的微处理器1108a可以用于在车辆(即第一参与者1102a)中生成警报,以避免与一个或多个其它参与者1102b-1102n发生事故。在第一参与者1102a中使用轨迹规划器1111可以有助于第一参与者1102a安全驾驶,因为微处理器1108a能够让轨迹规划器1111在车辆(即第一参与者1102a)中主动生成警报,以避免与一个或多个其它参与者1102b-1102n发生事故。在另一个示例中,在自动驾驶车辆(即机器人车辆)中使用轨迹生成器1111可以改善车辆的功能。例如,通过利用准确的事故风险等级,可以避免由于碰撞等对车辆造成任何潜在损坏,相反,通过主动行动(例如在正确的时刻应用制动、选择正确的方向、调整速度等)却有
可能发生碰撞。此外,一辆车辆可以在v2v通信中与另一辆车辆通信,以有助于另一辆车辆应用适当的控制,如制动、调整速度等,以主动避免任何事故。在又一个示例中,在数百到数千个交通参与者的场景中,汽车保险提供商拥有的服务器(例如服务器1104)可以用于自动更新数据库,其中,更新所有交通参与者的事故风险等级。这有助于为拥有此类车辆保单的保单持有人生成准确、符合事实和逻辑的定价。此外,服务器1104还可以识别事故的真实原因,该事故可能是由于第一参与者1102a与一个或多个其它参与者1102b-1102n之间的交互或协商较少或违反交通规则等造成的。此外,服务器1104还可以识别第一参与者1102a和一个或多个其它参与者1102b-1102n中谁对事故负责。通知可以被发送到相关用户。
[0199]
在不脱离所附权利要求所定义的本发明范围的情况下,可以对上文描述的本发明的实施例进行修改。如“包括”、“结合”、“具有”、“是”等用于描述和要求保护本发明的表述旨在以非排他的方式解释,即允许未明确描述的项目、部件或元素也存在。对单数的引用也应解释为与复数有关。本文使用的词语“示例性”表示“作为一个示例、实例或说明”。任何被描述为“示例性”的实施例不一定被解释为比其它实施例更优选或更有利,也不一定排除其它实施例的特征的结合。本文使用的词语“可选地”表示“在一些实施例中提供而在其它实施例中没有提供”。应理解,为了清楚起见而在单独实施例的上下文中描述的本发明的一些特征还可以在单个实施例中组合提供。相反,为简洁起见而在单个实施例的上下文中描述的本发明的各个特征也可以单独提供、以任何合适的组合提供,或适合于本发明的任何其它描述的实施例。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。
