1.本发明涉及一种车辆的控制系统,该控制系统具有估计发动机扭矩的功能,该发动机扭矩是发动机的输出扭矩。
背景技术:
2.日本未审查专利申请公报第2008-57492号描述了一种车辆的示例,该车辆包括发动机、连接到发动机曲轴的阻尼器和动力传递装置。动力传递装置具有连接到阻尼器的输入轴和电动发电机。电动发电机的转子与输入轴同步旋转。
3.车辆控制系统包括控制发动机的第一控制装置和控制动力传递装置的第二控制装置。第一控制装置接收来自曲柄角度传感器的检测信号作为输入。第二控制装置接收来自旋转位置检测传感器的检测信号作为输入。曲柄角度传感器检测曲轴的旋转角度,并根据曲轴的转速输出检测信号。旋转位置检测传感器检测电动发电机中转子的旋转角度,并根据转子的转速输出检测信号。
4.发动机的输出经由阻尼器输入到动力传递装置的输入轴。此时,当发动机扭矩波动时,阻尼器中出现扭转振动,并且由扭转振动引起的共振可能出现在动力传递装置的输入轴中。当这种共振发生在动力传递装置的输入轴中时,共振影响扭矩被输入到曲轴,该共振影响扭矩是由共振引起的扭矩。结果,曲轴的旋转角速度波动。
5.为此,当使用曲轴的旋转角速度计算发动机扭矩时,需要考虑共振影响扭矩来计算发动机扭矩。换句话说,基于通过计算曲轴旋转角速度的时间导数获得的值来计算发动机惯性扭矩。基于通过计算动力传递装置的输入轴的旋转角速度的时间导数获得的值和通过计算电动发电机的旋转角速度的时间导数获得的值来计算共振影响扭矩。然后,发动机惯性扭矩和共振影响扭矩之和被计算作为发动机扭矩。
技术实现要素:
6.为了由第一控制装置计算发动机扭矩,可以考虑计算共振影响扭矩所需的信息从第二控制装置发送并由第一控制装置接收的情况。计算共振影响扭矩所需的信息的示例可以包括动力传递装置的输入轴的旋转角速度和电动发电机的旋转角速度。
7.在这种情况下,第一控制装置基于从第二控制装置接收的最新信息计算共振影响扭矩,并且使用曲轴的旋转角速度的最新值计算发动机惯性扭矩。然后,第一控制装置计算最新共振影响扭矩的计算值和最新发动机惯性扭矩的计算值之和作为发动机扭矩。
8.然而,当信息从第二控制装置发送到第一控制装置时,出现了由于通信而导致的延迟。为此,在用于计算共振影响扭矩的信息的检测时刻与用于计算发动机惯性扭矩的曲轴旋转角速度的检测时刻之间出现偏差。换句话说,第一时刻的共振影响扭矩与不同于第一时刻的第二时刻的发动机惯性扭矩之和被计算作为发动机扭矩。因此,在提高发动机扭矩的计算准确度方面有改进的空间。
9.当共振影响扭矩由第二控制装置计算、从第二控制装置发送并由第一控制装置接
收时,也会出现这样的问题。
10.本发明的一个方面是一种车辆的控制系统。该控制系统包括:发动机,该发动机安装在车辆上;阻尼器,阻尼器连接到发动机的曲轴;动力传递装置,该动力传递装置具有连接到阻尼器的输入轴和与输入轴同步旋转的旋转体;第一传感器,该第一传感器被配置成检测曲轴的旋转角度;第二传感器,该第二传感器被配置成检测输入轴或旋转体的旋转角度;第一控制装置,该第一控制装置被配置为接收第一传感器的检测信号作为输入;以及,第二控制装置,该第二控制装置被配置为接收第二传感器的检测信号作为输入并与第一控制装置通信。第二控制装置被配置为执行传递装置侧旋转角速度获取过程,该传递装置侧旋转角速度获取过程用于基于第二传感器的检测信号获取输入轴或旋转体的旋转角速度作为传递装置侧旋转角速度。第二控制装置被配置为执行发送过程,该发送过程用于将共振影响扭矩或传递装置侧旋转角速度以及作为传递装置侧旋转角速度的获取时刻的信息获取时刻发送到第一控制装置。共振影响扭矩是由发生在动力传递装置中的共振引起的扭矩,并且基于传递装置侧旋转角速度来计算。第一控制装置被配置为执行:旋转角速度推导过程,该旋转角速度推导过程用于基于第一传感器的检测信号推导曲轴的旋转角速度作为发动机旋转角速度;惯性扭矩计算过程,该惯性扭矩计算过程用于基于发动机旋转角速度计算发动机惯性扭矩;以及,发动机扭矩计算过程,该发动机扭矩计算过程用于计算共振影响扭矩和发动机惯性扭矩之和作为发动机扭矩,发动机扭矩是发动机的输出扭矩。第一控制装置被配置为在发动机扭矩计算过程中,基于从第二控制装置接收的信息获取时刻,来选择基于在预定推导时刻获取的传递装置侧旋转角速度的共振影响扭矩,并且计算共振影响扭矩和基于在推导时刻推导的发动机旋转角速度计算的发动机惯性扭矩之和作为发动机扭矩。
11.利用上述配置,在发动机扭矩计算过程中计算发动机扭矩时,使用以下值:
[0012]-发动机惯性扭矩,该发动机惯性扭矩基于在预定推导时刻获取的发动机旋转角速度来计算。
[0013]-共振影响扭矩,该共振影响扭矩基于在预定推导时刻获取的传递装置侧旋转角速度来计算。
[0014]
换句话说,在上述配置中,使用同步的发动机惯性扭矩和共振影响扭矩来计算发动机扭矩。这样,可以提高发动机扭矩的计算准确度。
[0015]
在上述方面中,发动机可以是火花点火型发动机,并且当发动机的点火时刻提前时,第一控制装置可以执行推导时刻调整过程用于使推导时刻前移。
[0016]
例如,即使当发动机正常操作时,发动机扭矩的实际值也会脉动。换句话说,发动机扭矩的实际值在点火时刻之后增加,并且发动机扭矩的实际值在增加到最大值之后减小。
[0017]
利用上述配置,推导时刻根据发动机的点火时刻而变化。这样,即使当点火时刻改变时,也可以防止点火时刻与推导时刻之间的偏差量改变。
[0018]
在上述方面中,第二控制装置可以执行共振影响扭矩计算过程,用于基于传递装置侧旋转角速度计算共振影响扭矩,并且在发送过程中向第一控制装置发送共振影响扭矩和信息获取时刻,该信息获取时刻是用于计算共振影响扭矩的传递装置侧旋转角速度的获取时刻。
[0019]
利用上述配置,第二控制装置基于传递装置侧旋转角速度计算共振影响扭矩。然后,作为用于计算共振影响扭矩的传递装置侧旋转角速度的获取时刻的信息获取时刻和共振影响扭矩从第二控制装置发送并由第一控制装置接收。为此,第一控制装置可以掌握获取用于计算从第二控制装置接收的共振影响扭矩的传递装置侧旋转角速度的时刻。因此,第一控制装置可以使用同步的发动机惯性扭矩和共振影响扭矩来计算发动机扭矩。
[0020]
在上述方面,动力传递装置可以具有电动发电机,电动发电机的转子可以是与输入轴同步旋转的旋转体,并且第二传感器可以检测旋转体的旋转角度。第二控制装置可以在传递装置侧旋转角速度获取过程中获取旋转体的旋转角速度作为传递装置侧旋转角速度,并且在发送过程中向第一控制装置发送作为电动发电机的输出扭矩的马达扭矩、旋转体的旋转角速度、输入轴的旋转角速度以及作为旋转体的旋转角速度的获取时刻的信息获取时刻。第一控制装置可以执行共振影响扭矩计算过程,用于基于从第二控制装置接收的马达扭矩、旋转体的旋转角速度和输入轴的旋转角速度来计算共振影响扭矩。
[0021]
利用上述配置,马达扭矩、旋转体的旋转角速度和输入轴的旋转角速度被发送到第一控制装置。第一控制装置基于从第二控制装置接收的信息计算共振影响扭矩。然后,第一控制装置计算共振影响扭矩的计算值和发动机惯性扭矩之和作为发动机扭矩,共振影响扭矩的计算值是基于在预定推导时刻获取的旋转体的旋转角速度计算的,发动机惯性扭矩是基于在推导时刻推导的发动机旋转角速度计算的。
[0022]
在上述方面,第二控制装置可以执行马达扭矩获取过程,该马达扭矩获取过程用于基于马达电流值获取电动发电机的输出扭矩的计算值作为马达扭矩,该马达电流值是指示流过电动发电机的电流的值。
[0023]
利用上述配置,可以使用电动发电机的输出扭矩的计算值来计算共振影响扭矩。
附图说明
[0024]
下面将参照附图描述本发明示例性实施例的特征、优点以及技术和工业意义,在附图中相同的附图标记表示相同的元件,并且其中:
[0025]
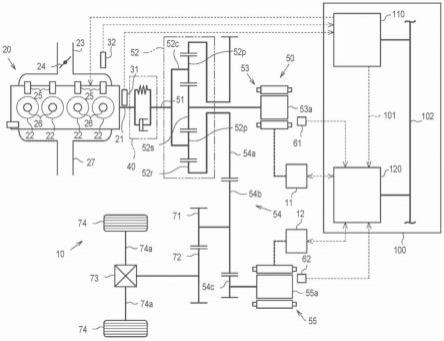
图1是示意性示出应用根据第一实施例的车辆的控制系统的混合动力车辆的配置图;
[0026]
图2是描述在根据第一实施例的控制系统中由第一控制装置执行的每个过程和由第二控制装置执行的每个过程的框图;
[0027]
图3是描述发动机扭矩计算过程的流程图;
[0028]
图4是示出发动机扭矩的实际值的转变的图;
[0029]
图5是描述在根据第二实施例的控制系统中由第一控制装置执行的每个过程和由第二控制装置执行的每个过程的框图;
[0030]
图6是示出根据第三实施例的控制系统以及应用该控制系统的车辆的驱动系统的配置图;
[0031]
图7是应用了变型示例的控制系统的发动机的模型图;并且
[0032]
图8是示出由发动机产生的扭矩的转变的图。
具体实施方式
[0033]
第一实施例
[0034]
以下,将参照图1至图4描述车辆控制系统的第一实施例。如图1所示,根据本实施例的控制系统100应用于混合动力车辆10。
[0035]
混合动力车辆10的总体配置
[0036]
混合动力车辆10包括发动机20、连接到发动机20的曲轴21的阻尼器40和动力传递装置50。阻尼器40具有衰减从发动机20输出的扭矩的波动并将波动传递到动力传递装置50的功能。
[0037]
发动机20是火花点火型发动机。发动机20包括多个气缸22、引入每个气缸22的进气空气流过的进气通道23以及布置在进气通道23中的节气门24。节气门24调整进气空气量,该进气空气量是进气空气在进气通道23中的流量。
[0038]
发动机20为每个气缸设置有燃料喷射阀25和点火装置26。在每个气缸22中,包含从燃料喷射阀25喷射的燃料和进气空气的空气-燃料混合物通过点火装置26的火花放电而燃烧。如上所述,由于活塞通过气缸22中的空气-燃料混合物的燃烧在气缸22中往复运动,曲轴21旋转。此外,通过空气-燃料混合物的燃烧在每个气缸22中产生的排气被排放到排气通道27。
[0039]
发动机20包括向控制系统100输出检测信号的多种类型的传感器。传感器的示例可以包括曲柄角度传感器31和凸轮角度传感器32。曲柄角度传感器31检测曲轴21的旋转角度,并根据曲轴21的转速输出检测信号。此外,凸轮角度传感器32检测与曲轴21同步旋转的凸轮轴的旋转角度,并根据凸轮轴的转速输出检测信号。在本实施例中,曲柄角度传感器31对应于“第一传感器”。
[0040]
动力传递装置50包括连接到阻尼器40的输入轴51和行星齿轮机构52。行星齿轮机构52具有太阳齿轮52s、齿圈52r和与太阳齿轮52s和齿圈52r都啮合的多个小齿轮52p。每个小齿轮52p以其能够自转和绕太阳齿轮52s公转的状态由托架52c支撑。输入轴51连接到托架52c。
[0041]
动力传递装置50包括第一电动发电机53。作为第一电动发电机53的转子的转子53a连接到太阳齿轮52s。换句话说,由于第一电动发电机53经由行星齿轮机构52连接到输入轴51,所以第一电动发电机53的转子53a与输入轴51同步旋转。
[0042]
动力传递装置50包括齿轮机构54和第二电动发电机55。齿轮机构54具有中间驱动齿轮54a、中间从动齿轮54b和减速齿轮54c。中间驱动齿轮54a与齿圈52r一体旋转。中间从动齿轮54b与中间驱动齿轮54a啮合。减速齿轮54c与中间从动齿轮54b啮合。减速齿轮54c连接到转子55a,转子55a是第二电动发电机55的转子。
[0043]
动力传递装置50包括向控制系统100输出检测信号的多种类型的传感器。传感器的示例可以包括第一马达角度传感器61和第二马达角度传感器62。第一马达角度传感器61检测第一电动发电机53的转子53a的旋转角度,并根据转子53a的转速输出检测信号。第二马达角度传感器62检测第二电动发电机55的转子55a的旋转角度,并根据转子55a的转速输出检测信号。在本实施例中,第一马达角度传感器61对应于“第二传感器”,第一电动发电机53的转子53a对应于与输入轴51同步旋转的“旋转体”。
[0044]
混合动力车辆10包括与中间从动齿轮54b一体旋转的最终驱动齿轮71和与最终驱
动齿轮71啮合的最终从动齿轮72。最终驱动齿轮71经由操作机构73连接到驱动轮74的轮轴74a。
[0045]
混合动力车辆10包括作为第一电动发电机53的逆变器的第一逆变器11和作为第二电动发电机55的逆变器的第二逆变器12。换句话说,通过控制第一逆变器11来驱动第一电动发电机53,并且通过控制第二逆变器12来驱动第二电动发电机55。
[0046]
控制系统100的配置
[0047]
如图1所示,控制系统100包括控制发动机20的第一控制装置110和控制动力传递装置50的第二控制装置120。第一控制装置110接收来自包括在发动机20中的各种传感器的检测信号作为输入。第二控制装置120接收来自包括在动力传递装置50中的各种传感器的检测信号作为输入。换句话说,第一控制装置110接收曲柄角度传感器31和凸轮角度传感器32的检测信号作为输入。第二控制装置120接收第一马达角度传感器61和第二马达角度传感器62的检测信号作为输入。
[0048]
控制系统100包括信号线路101,用于将由第一控制装置110获取的曲柄计数器cntcr发送到第二控制装置120。曲柄计数器cntcr是每当曲轴21的旋转角度增加预定旋转角度时计数的值。然后,当发动机20的一个循环完成时,曲柄计数器cntcr被重设为“0”。例如,在发动机20的一个循环中,曲柄计数器cntcr被计数到“15”。
[0049]
信号线路101是专用于从第一控制装置110发送曲柄计数器cntcr的信号线路。为此,当使用信号线路101将曲柄计数器cntcr发送到第二控制装置120时发生的延迟被充分限制在该延迟不影响基于曲柄计数器cntcr的各种过程执行的范围内。
[0050]
控制系统100包括用于在控制装置110与120之间发送和接收各种类型信息的can通信线路102。can通信线路102用于在安装在混合动力车辆10上的大量控制装置中发送和接收信息。为此,例如,当由第二控制装置120获得的信息经由can通信线路102被发送到第一控制装置110时,在由第二控制装置120发送信息的时刻与由第一控制装置110接收信息的时刻之间出现延迟。
[0051]
控制装置110、120中每一个包括cpu、rom和存储装置,该存储装置是电可重写非易失性存储器(均未示出)。rom存储由cpu执行的控制程序。存储装置存储cpu的各种计算结果等等。
[0052]
在控制系统100中的处理内容
[0053]
控制系统100的第一控制装置110计算发动机扭矩te,发动机扭矩te是发动机20的输出扭矩的计算值。由于发动机20的曲轴21经由阻尼器40连接到动力传递装置50的输入轴51,所以第一控制装置110进一步使用由第二控制装置120获取的信息来计算发动机扭矩te。
[0054]
参照图2,将描述分别由用于计算发动机扭矩te的控制装置110、120执行的每个过程。首先,将描述由第二控制装置120执行的各种过程。
[0055]
第二控制装置120执行马达转速获取过程m21。换句话说,第二控制装置120基于第一马达角度传感器61的检测信号获取第一马达转速nmg1,该第一马达转速nmg1是第一电动发电机53的转子53a的转速。第二控制装置120基于第二马达角度传感器62的检测信号获取第二马达转速nmg2,该第二马达转速nmg2是第二电动发电机55的转子55a的转速。第二控制装置120以预定循环重复执行马达转速获取过程m21,以计算第一马达转速nmg1和第二马达
转速nmg2。
[0056]
第二控制装置120执行用于控制第一电动发电机53的第一马达控制过程m22。在第一马达控制过程m22中,第二控制装置120基于第一马达转速nmg1控制用于第一电动发电机53的第一逆变器11。此外,第二控制装置120获取第一马达电流值img1,其是指示流过第一电动发电机53的电流的值。
[0057]
第二控制装置120执行信息获取过程m23,用于计算或获取发送到第一控制装置110的信息。在本实施例中,信息获取过程m23包括第一马达扭矩获取过程m231、马达旋转角速度获取过程m232和输入轴旋转角速度计算过程m233。
[0058]
在第一马达扭矩获取过程m231中,第二控制装置120获取第一马达扭矩tmg1,其是第一电动发电机53的输出扭矩。在本实施例中,第二控制装置120基于在第一马达控制过程m22中获取的第一马达电流值img1获取第一电动发电机53的输出扭矩的计算值作为第一马达扭矩tmg1。
[0059]
第二控制装置120以预定间隔重复执行第一马达扭矩获取过程m231。例如,每当从第一控制装置110发送的曲柄计数器cntcr改变时,第二控制装置120执行第一马达扭矩获取过程m231以获取第一马达扭矩tmg1。
[0060]
在马达旋转角速度获取过程m232中,第二控制装置120获取第一马达旋转角速度ωmg1,其是第一电动发电机53的转子53a的旋转角速度。此外,第二控制装置120获取第二马达旋转角速度ωmg2,其是第二电动发电机55的转子55a的旋转角速度。在本实施例中,第二控制装置120基于第一马达转速nmg1获取第一马达旋转角速度ωmg1,并且基于第二马达转速nmg2获取第二马达旋转角速度ωmg2。例如,第二控制装置120获取通过计算第一马达转速nmg1的时间导数获得的值作为第一马达旋转角速度ωmg1和通过计算第二马达转速nmg2的时间导数获得的值作为第二马达旋转角速度ωmg2。
[0061]
第二控制装置120以预定间隔执行马达旋转角速度获取过程m232。例如,每当从第一控制装置110发送的曲柄计数器cntcr改变时,第二控制装置120执行马达旋转角速度获取过程m232,以获得第一马达旋转角速度ωmg1和第二马达旋转角速度ωmg2。
[0062]
如上文所描述,在本实施例中,第一马达角度传感器61对应于“第二传感器”。为此,第一马达旋转角速度ωmg1对应于“传递装置侧旋转角速度”,传递装置侧旋转角速度基于第一马达角度传感器61的检测信号获取。此外,用于获取第一马达旋转角速度ωmg1的马达旋转角速度获取过程m232对应于“传递装置侧旋转角速度获取过程”。
[0063]
在输入轴旋转角速度计算过程m233中,第二控制装置120计算输入轴旋转角速度ωinp,其是动力传递装置50的输入轴51的旋转角速度。换句话说,第二控制装置120基于在马达转速获取过程m21中获取的第一马达转速nmg1和第二马达转速nmg2来计算输入轴旋转角速度ωinp。例如,第二控制装置120通过将第一马达转速nmg1和第二马达转速nmg2输入以下关系方程式(方程式1)来计算输入轴转速ninp。在关系方程式(方程式1)中,“ρ”是行星齿轮机构52的传动比。行星齿轮机构52的传动比ρ是通过将太阳齿轮52s的齿数除以齿圈52r的齿数而获得的值。此外,“gr”是动力传递装置50的齿轮机构54的传动比。
[0064][0065]
然后,第二控制装置120通过将输入轴转速ninp输入到以下关系方程式(方程式2)
中来计算输入轴旋转角速度ωinp:
[0066][0067]
第二控制装置120以预定间隔执行输入轴旋转角速度计算过程m233。例如,每当从第一控制装置110发送的曲柄计数器cntcr改变时,第二控制装置120执行输入轴旋转角速度计算过程m233以获取输入轴旋转角速度ωinp。
[0068]
第二控制装置120执行发送过程m24。在发送过程m24中,第二控制装置120将由第一控制装置110计算发动机扭矩te所需的信息发送到第一控制装置110。在本实施例中,第二控制装置120向can通信线路102输出彼此关联的第一马达扭矩tmg1、第一马达旋转角速度ωmg1、输入轴旋转角速度ωinp和信息获取时刻tmd。在本实施例中,第二控制装置120向can通信线路102输出在获取所发送的第一马达旋转角速度ωmg1时的曲柄计数器cntcr作为信息获取时刻tmd。
[0069]
在信息获取过程m23中获得的信息和信息获取时刻tmd从第二控制装置120发送到can通信线路102。然后,第一控制装置110经由can通信线路102接收信息和信息获取时刻tmd。
[0070]
接下来,将描述由第一控制装置110执行的各种过程。第一控制装置110执行用于推导曲柄计数器cntcr的曲柄计数器推导过程m11。换句话说,第一控制装置110基于曲柄角度传感器31的检测信号监测曲柄角,该曲柄角是曲轴21的旋转角度。然后,每当曲柄角增加预定角度时,第一控制装置110将曲柄计数器cntcr增加“1”。此外,当发动机20的一个循环完成时,第一控制装置110将曲柄计数器cntcr重设为“0”。
[0071]
第一控制装置110执行点火时刻调整过程m12,用于根据发动机20的操作状态改变点火时刻tmi。例如,当发动机20预热时,与发动机20不预热的情况相比,第一控制装置110使点火时刻tmi提前。然后,第一控制装置110基于在点火时刻调整过程m12中调整的点火时刻tmi来控制点火装置26。
[0072]
第一控制装置110执行发动机旋转角速度获取过程m13,用于获取发动机旋转角速度ωe,发动机旋转角速度ωe是曲轴21的旋转角速度。在发动机旋转角速度获取过程m13中,第一控制装置110基于曲柄角度传感器31的检测信号计算发动机转速ne,发动机转速ne是曲轴21的转速。然后,第一控制装置110获取通过计算发动机转速ne的时间导数获得的值作为发动机旋转角速度ωe。
[0073]
第一控制装置110以预定间隔执行发动机旋转角速度获取过程m13。例如,每当曲柄计数器cntcr改变时,第一控制装置110执行发动机旋转角速度获取过程m13以获取发动机旋转角速度ωe。
[0074]
第一控制装置110执行惯性扭矩计算过程m14,用于计算发动机惯性扭矩tei,发动机惯性扭矩tei是发动机20的惯性扭矩。例如,第一控制装置110通过将在发动机旋转角速度获取过程m13中获取的发动机旋转角速度ωe输入到以下关系方程式(方程式3)中来计算发动机惯性扭矩tei。在关系方程式(方程式3)中,“ie”是发动机20的惯性矩。换句话说,第一控制装置110可以使用通过计算发动机旋转角速度ωe的时间导数获得的值来计算发动机惯性扭矩tei。
[0075][0076]
第一控制装置110以预定间隔执行惯性扭矩计算过程m14。例如,每当曲柄计数器cntcr改变时,第一控制装置110执行惯性扭矩计算过程m14以获取发动机惯性扭矩tei。
[0077]
这里,发动机20的输出经由阻尼器40输入到动力传递装置50的输入轴51。此时,当发动机扭矩波动时,阻尼器40中可能出现扭转振动,并且由扭转振动引起的共振可能出现在输入轴51中。当这种共振发生在输入轴51中时,由共振引起的扭矩被输入到曲轴21。在本实施例中,由以这种方式在动力传递装置50中发生的共振引起的扭矩被称为“共振影响扭矩”。
[0078]
第一控制装置110执行用于计算共振影响扭矩tdmp的共振影响扭矩计算过程m15。在共振影响扭矩计算过程m15中,第一控制装置110基于经由can通信线路102接收的信息,即第一马达扭矩tmg1、第一马达旋转角速度ωmg1和输入轴旋转角速度ωinp,计算共振影响扭矩tdmp。例如,第一控制装置110通过将第一马达扭矩tmg1、第一马达旋转角速度ωmg1和输入轴旋转角速度ωinp输入以下关系方程式(方程式4)来计算共振影响扭矩tdmp。在关系方程式(方程式4)中,“iinp”是输入轴51的惯性矩,“ig”是第一电动发电机53的惯性矩。利用关系方程式(方程式4),第一控制装置110可以使用通过计算输入轴旋转角速度ωinp的时间导数获得的值和通过计算第一马达旋转角速度ωmg1的时间导数获得的值来计算共振影响扭矩tdmp。
[0079][0080]
第一控制装置110以预定间隔执行共振影响扭矩计算过程m15。例如,每当第一控制装置110经由can通信线路102接收到上述信息时,第一控制装置110执行共振影响扭矩计算过程m15以计算共振影响扭矩tdmp。
[0081]
第一控制装置110执行推导时刻调整过程m16。换句话说,第一控制装置110根据在点火时刻调整过程m12中调整的点火时刻tmi来调整推导时刻tma。例如,当点火时刻tmi提前时,第一控制装置110使推导时刻tma前移。在这种情况下,从点火时刻tmi延迟了预定延迟时段δtm的时刻被设定为推导时刻tma。作为延迟时段δtm,设定长度短于发动机20的一个循环的一半的时段。
[0082]
当点火时刻tmi到达时,空气-燃料混合物通过点火装置26的操作在气缸22中燃烧。然后,发动机扭矩的实际值通过空气-燃料混合物的燃烧而增加。当发动机扭矩的实际值达到其峰值时,其减小,直到下一个气缸22中的空气-燃料混合物的燃烧开始。换句话说,紧接在点火时刻tmi之后,气缸22中燃烧的影响在发动机扭矩的实际值中得到很大反映。然而,当从点火时刻tmi延迟时,气缸22中燃烧的影响难以反映在发动机扭矩的实际值中。因此,延迟时段δtm被设定为使得当气缸22中的燃烧的影响在发动机扭矩的实际值中被很大地反映时的时刻被设定为推导时刻tma。
[0083]
第一控制装置110执行用于计算发动机扭矩te的发动机扭矩计算过程m17。换句话说,第一控制装置110计算在惯性扭矩计算过程m14中计算的发动机惯性扭矩tei和在共振影响扭矩计算过程m15中计算的共振影响扭矩tdmp之和作为发动机扭矩te。在本实施例中,
第一控制装置110使用在推导时刻调整过程m16中调整的推导时刻tma和曲柄计数器cntcr来计算发动机扭矩te。
[0084]
参照图3,将描述发动机扭矩计算过程m17。在发动机扭矩计算过程m17中,首先,在步骤s11中,第一控制装置110从在惯性扭矩计算过程m14当中计算的多个发动机惯性扭矩tei中选择发动机惯性扭矩tei(tma),该发动机惯性扭矩tei(tma)是基于在推导时刻tma推导的发动机旋转角速度ωe计算的。换句话说,第一控制装置110选择当曲柄计数器cntcr等于指示推导时刻tma的值时推导的发动机惯性扭矩tei作为发动机惯性扭矩tei(tma)。
[0085]
随后,在步骤s13中,第一控制装置110从在共振影响扭矩计算过程m15中计算的多个共振影响扭矩tdmp当中选择共振影响扭矩tdmp(tma),该共振影响扭矩tdmp(tma)是基于在推导时刻tma推导的第一马达旋转角速度ωmg1计算的。换句话说,第一控制装置110选择在信息获取时刻tmd等于推导时刻tma时基于第一马达旋转角速度ωmg1计算的共振影响扭矩tdmp作为共振影响扭矩tdmp(tma)。
[0086]
然后,在步骤s15中,第一控制装置110计算发动机惯性扭矩tei(tma)和共振影响扭矩tdmp(tma)之和作为发动机扭矩te(tma)。换句话说,第一控制装置110计算在推导时刻tma的发动机扭矩te(tma)。此后,第一控制装置110暂时结束发动机扭矩计算过程m17。
[0087]
第一实施例中的作用和有利效果
[0088]
第二控制装置120接收第一马达角度传感器61的检测信号和第二马达角度传感器62的检测信号作为输入。为此,在第二控制装置120中,推导第一马达旋转角速度ωmg1和输入轴旋转角速度ωinp。此外,还获取第一马达扭矩tmg1。在本实施例中,第一马达旋转角速度ωmg1、输入轴旋转角速度ωinp和第一马达扭矩tmg1是计算共振影响扭矩tdmp所需的信息。
[0089]
在本实施例中,第二控制装置120经由can通信线路102向第一控制装置110发送与信息获取时刻tmd相关联的第一马达旋转角速度ωmg1、输入轴旋转角速度ωinp和第一马达扭矩tmg1。
[0090]
通过执行共振影响扭矩计算过程m15,第一控制装置110使用从第二控制装置120发送的第一马达旋转角速度ωmg1、输入轴旋转角速度ωinp和第一马达扭矩tmg1来计算共振影响扭矩tdmp。此外,通过执行惯性扭矩计算过程m14,第一控制装置110使用发动机旋转角速度ωe计算发动机惯性扭矩tei。
[0091]
这里,当使用can通信线路102发送信息时,在从第二控制装置120发送信息的时刻与第一控制装置110接收信息的时刻之间出现延迟。
[0092]
因此,在本实施例中,基于由第一控制装置110接收的信息获取时刻tmd以及第一马达旋转角速度ωmg1、输入轴旋转角速度ωinp和第一马达扭矩tmg1,从在共振影响扭矩计算过程m15中计算的多个共振影响扭矩tdmp当中选择基于在推导时刻tma推导的第一马达旋转角速度ωmg1计算的共振影响扭矩tdmp(tma)。类似地,从在惯性扭矩计算过程m14中计算的多个发动机惯性扭矩tei当中选择基于在推导时刻tma推导的发动机旋转角速度ωe计算的发动机惯性扭矩tei(tma)。然后,发动机惯性扭矩tei(tma)和共振影响扭矩tdmp(tma)之和被计算作为推导时刻tma的发动机扭矩te(tma)。
[0093]
换句话说,在本实施例中,可以使用同步的发动机惯性扭矩tei和共振影响扭矩tdmp来计算发动机扭矩te。这样,可以提高发动机扭矩te的计算准确度。
[0094]
在本实施例中,可以进一步获得下面描述的有利效果。
[0095]
(1-1)在本实施例中,当点火时刻tmi提前时,推导时刻tma前移。另一方面,当点火时刻tmi滞后时,推导时刻tma延迟。为此,当点火时刻tmi改变时,可以防止点火时刻tmi与推导时刻tma之间的偏差量改变。结果,在发动机扭矩计算过程m17中,可以计算发动机扭矩te,其中气缸22中的空气-燃料混合物的燃烧的影响被同样程度地反映。
[0096]
在图4中,当空气-燃料混合物在气缸22中正常燃烧时发动机扭矩的实际值ter的转变由实线表示,当气缸22中发生失火时发动机扭矩的实际值tera的转变由虚线表示。当气缸22中没有失火发生时,如图4中的实线所示,发动机扭矩的实际值ter从点火时刻tmi急剧增加。然后,当发动机扭矩的实际值ter在第一时刻tmf达到其峰值时,实际值ter逐渐减小。另一方面,当气缸22中发生失火时,如图4中的虚线所示,即使在点火时刻tmi之后,发动机扭矩的实际值tera也不会波动太大。
[0097]
为此,当使用发动机扭矩te执行失火判定时,第一时刻tmf或第一时刻tmf之前和之后的时刻可以被设定为推导时刻tma。当点火时刻tmi改变时,该第一时刻tmf也改变。在这点上,在本实施例中,根据点火时刻tmi设定推导时刻tma。为此,即使当点火时刻tmi改变时,也可以将第一时刻tmf或第一时刻tmf之前和之后的时刻设定为推导时刻tma。因此,可以高准确度地执行失火判定。
[0098]
(1-2)在本实施例中,第一控制装置110计算共振影响扭矩tdmp。为此,与第二控制装置120计算共振影响扭矩tdmp的情况相比,可以减少第二控制装置120上的控制载荷。
[0099]
(1-3)在本实施例中,基于指示流过第一电动发电机53的电流的第一马达电流值img1的第一电动发电机53的输出扭矩的计算值被用作第一马达扭矩tmg1。在这种情况下,当输出扭矩的计算值的准确度高时,与输出扭矩的命令值被用作第一马达扭矩tmg1的情况相比,可以提高共振影响扭矩tdmp的计算准确度。
[0100]
第二实施例
[0101]
将参照图5描述车辆的控制系统的第二实施例。在下面的描述中,将主要描述与第一实施例不同的部分,并且与第一实施例中相同或对应的构件配置将由相同的附图标记表示,并且将省略其重复描述。
[0102]
参考图5,从由用于计算发动机扭矩te的控制装置110、120执行的过程当中,将主要描述与第一实施例不同的部分。首先,将描述由第二控制装置120执行的各种过程。
[0103]
第二控制装置120执行信息获取过程m23a,用于计算或获取发送到第一控制装置110的信息。在本实施例中,除了第一马达扭矩获取过程m231、马达旋转角速度获取过程m232和输入轴旋转角速度计算过程m233之外,信息获取过程m23a还包括共振影响扭矩计算过程m234。
[0104]
在共振影响扭矩计算过程m234中,第二控制装置120计算共振影响扭矩tdmp。换句话说,第二控制装置120通过将第一马达扭矩tmg1、第一马达旋转角速度ωmg1和输入轴旋转角速度ωinp输入到上述关系方程式(方程式4)中来计算共振影响扭矩tdmp。
[0105]
第二控制装置120以预定间隔执行共振影响扭矩计算过程m234。例如,每当曲柄计数器cntcr改变时,第二控制装置120执行共振影响扭矩计算过程m234以计算共振影响扭矩tdmp。
[0106]
第二控制装置120执行发送过程m24a。在发送过程m24a中,第二控制装置120向can
通信线路102输出彼此关联的共振影响扭矩tdmp和信息获取时刻tmd。在本实施例中,第二控制装置120向can通信线路102输出在获取第一马达旋转角速度ωmg1时的曲柄计数器cntcr作为信息获取时刻tmd,第一马达旋转角速度ωmg1用于计算所发送的共振影响扭矩tdmp。
[0107]
共振影响扭矩tdmp和信息获取时刻tmd在can通信线路102中从第二控制装置120发送。然后,第一控制装置110经由can通信线路102接收共振影响扭矩tdmp和信息获取时刻tmd。
[0108]
接下来,将描述从由第一控制装置110执行的各种过程当中与第一实施例的过程不同的部分。在发动机扭矩计算过程m17中,第一控制装置110计算在惯性扭矩计算过程m14中计算的发动机惯性扭矩tei和经由can通信线路102接收的共振影响扭矩tdmp之和作为发动机扭矩te。在本实施例中,第一控制装置110使用在推导时刻调整过程m16中调整的推导时刻tma和曲柄计数器cntcr来计算发动机扭矩te。
[0109]
换句话说,如在第一实施例中,第一控制装置110从在惯性扭矩计算过程m14中计算的多个发动机惯性扭矩tei当中选择发动机惯性扭矩tei(tma),该发动机惯性扭矩tei(tma)是基于在推导时刻tma推导的发动机旋转角速度ωe计算的。此外,第一控制装置110在从第二控制装置120接收的多个共振影响扭矩tdmp当中选择共振影响扭矩tdmp(tma),该共振影响扭矩tdmp(tma)是基于在推导时刻tma推导的第一马达旋转角速度ωmg1计算的。例如,第一控制装置110选择与信息获取时刻tmd(其等于推导时刻tma)相关联的共振影响扭矩tdmp作为共振影响扭矩tdmp(tma)。然后,第一控制装置110计算发动机惯性扭矩tei(tma)和共振影响扭矩tdmp(tma)之和作为发动机扭矩te(tma)。
[0110]
第二实施例中的作用和有利效果
[0111]
对于本实施例,除了等同于第一实施例中的有利效果(1-1)和(1-3)的有利效果之外,还可以获得如下有利效果。
[0112]
(2-1)在本实施例中,第二控制装置120计算共振影响扭矩tdmp。然后,在与信息获取时刻tmd相关联的状态下,共振影响扭矩tdmp经由can通信线路102被发送到第一控制装置110。
[0113]
基于与共振影响扭矩tdmp一起接收的信息获取时刻tmd,第一控制装置110从接收的多个共振影响扭矩tdmp当中选择共振影响扭矩tdmp(tma),该共振影响扭矩tdmp(tma)是基于在推导时刻tma推导的第一马达旋转角速度ωmg1计算的。此外,第一控制装置110从在惯性扭矩计算过程m14中计算的多个发动机惯性扭矩tei当中选择发动机惯性扭矩tei(tma),该发动机惯性扭矩tei(tma)是基于在推导时刻tma推导的发动机旋转角速度ωe计算的。然后,第一控制装置110计算发动机惯性扭矩tei(tma)和共振影响扭矩tdmp(tma)之和作为推导时刻tma的发动机扭矩te(tma)。
[0114]
换句话说,在本实施例中,可以使用同步的发动机惯性扭矩tei和共振影响扭矩tdmp来计算发动机扭矩te。这样,可以提高发动机扭矩te的计算准确度。
[0115]
(2-2)在本实施例中,第二控制装置120计算共振影响扭矩tdmp。为此,与第一控制装置110计算共振影响扭矩tdmp的情况相比,可以减少第一控制装置110上的控制载荷。
[0116]
第三实施例
[0117]
将参照图6描述车辆的控制系统的第三实施例。在下面的描述中,将主要描述与上
述实施例中每个实施例不同的部分,并且与上述实施例中每个实施例相同或对应的构件配置将由相同的附图标记表示,并且将省略其重复描述。
[0118]
图6示出了应用根据本实施例的控制系统100b的车辆的驱动系统dr。驱动系统dr包括发动机20、变矩器80和作为动力传递装置的示例的变速器90。
[0119]
变矩器80连接到发动机20的曲轴21,并且具有锁止离合器81和阻尼器82。当锁止离合器81处于接合状态时,阻尼器82经由锁止离合器81连接到曲轴21。因此,当锁止离合器81处于接合状态时,发动机20的输出经由锁止离合器81和阻尼器82输入到变速器90的输入轴91。此时,当发动机扭矩波动时,阻尼器82中可能出现扭转振动,并且由扭转振动引起的共振可能出现在输入轴91中。当这种共振发生在输入轴91中时,共振影响扭矩(共振引起的扭矩)被输入到曲轴21。
[0120]
变速器90具有检测输入轴91的旋转角度的旋转位置检测传感器95。旋转位置检测传感器95根据输入轴91的转速向第二控制装置120输出检测信号。在本实施例中,旋转位置检测传感器95对应于“第二传感器”。此外,在本实施例中,第二传感器检测输入轴51的旋转角度。
[0121]
控制系统100b包括第一控制装置110和第二控制装置120。第一控制装置110经由信号线路101将曲柄计数器cntcr发送到第二控制装置120。此外,控制系统100b包括用于在控制装置110和120之间发送和接收信息的can通信线路102。
[0122]
第二控制装置120经由信号线路101从第一控制装置110接收曲柄计数器cntcr作为输入。此外,由于第二控制装置120接收旋转位置检测传感器95的检测信号作为输入,所以第二控制装置120可以获取输入轴旋转角速度ωinp,其是输入轴51的旋转角速度。在本实施例中,输入轴旋转角速度ωinp对应于“传递装置侧旋转角速度”。然后,第二控制装置120经由can通信线路102向第一控制装置110发送输入轴旋转角速度ωinp和信息获取时刻tmd,信息获取时刻tmd是在推导输入轴旋转角速度ωinp时的曲柄计数器cntcr。
[0123]
在这种情况下,第一控制装置110基于从第二控制装置120接收的输入轴旋转角速度ωinp计算共振影响扭矩tdmp。由于第一控制装置110接收来自曲柄角度传感器31的检测信号作为输入,所以第一控制装置110计算发动机惯性扭矩tei。因此,第一控制装置110可以计算基于在推导时刻tma推导的输入轴旋转角速度ωinp的共振影响扭矩tdmp(tma)和基于在推导时刻tma推导的发动机旋转角速度ωe的发动机惯性扭矩tei(tma)之和作为发动机扭矩te(tma)。
[0124]
变型示例
[0125]
这些实施例中的每个实施例可以如下变型和实施。上述实施例和下面的变型示例中的每一个都可以在不出现技术矛盾的范围内彼此组合地实施。
[0126]-在第一实施例和第二实施例中,获取第一电动发电机53的输出扭矩的计算值作为第一马达扭矩tmg1,但是本发明不限于此。例如,可以获取第一电动发电机53的输出扭矩的命令值作为第一马达扭矩tmg1。
[0127]-当驱动第一电动发电机53使得第一电动发电机53的输出扭矩周期性波动时,输出扭矩的振动频率可能偏离阻尼器40的共振频率。在这种情况下,共振影响扭矩tdmp的幅度几乎不受第一马达扭矩tmg1的大小的影响。为此,当计算发动机扭矩te时,可以省略第一马达扭矩tmg1。即使使用以这种方式计算的发动机扭矩te,也可以判定气缸22中是否存在
失火。
[0128]-在第三实施例中,共振影响扭矩tdmp由第二控制装置120计算,并且可以经由can通信线路102从第二控制装置120发送到第一控制装置110。在这种情况下,以与第三实施例中相同的方式,可以高准确度地计算发动机扭矩te。
[0129]-在第一和第二实施例中,当动力传递装置50设置有检测动力传递装置50的输入轴51的旋转角度的传感器时,基于传感器的输出信号计算的旋转角速度可以用作输入轴旋转角速度ωinp。
[0130]-输入到曲轴21的不仅有由空气-燃料混合物的燃烧引起的扭矩,而且有往复惯性质量扭矩。当包括活塞和连接活塞和曲轴21的连杆的一部分并在气缸22中往复运动的质量体用作往复质量体时,往复惯性质量扭矩是由往复质量体在气缸22中的往复运动产生的扭矩。为了进一步提高发动机扭矩te的计算准确度,可以移除往复惯性质量扭矩。
[0131]
如图7所示,当往复质量体bd的质量是往复质量mκ时,由往复质量体mκ产生的惯性力fκ可以由以下关系方程式(方程式5)表示。在关系方程式(方程式5)中,“ρ”是连续杆比的倒数。
[0132]
fκ≡mκ
·r·
ω2·
(cosθ ρ
·
cos 2θ)
[0133]
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ……
(方程式5)
[0134]
此外,曲柄臂切线方向上的载荷fκl可以表达为以下关系方程式(方程式6)。此外,使用上述关系方程式(方程式5),关系方程式(方程
[0135]
式6)可以转换成关系方程式(方程式7):
[0136][0137][0138]
曲柄臂轴向载荷fκr可以表示为以下关系方程式(方程式8):
[0139][0140]
当包括曲轴21和连杆的其余部分的旋转体br的质量是旋转质量mξ时,由旋转质量mξ产生的惯性力fξr可以由以下关系方程式(方程式9)表达。然后,基于该惯性力fξr,由空气-燃料混合物的燃烧引起的扭矩可以被推导为发动机惯性扭矩tei。
[0141]
fξr=mξ
·r·
ω2[0142]
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ……
(方程式9)
[0143]
这样,如图8所示,可以获得仅发动机20的旋转分量的扭矩ta作为发动机惯性扭矩tei。在图8中,仅发动机20的往复分量的扭矩tb的转变由点划线表示,并且扭矩ta和扭矩tb的组合扭矩tc由虚线表示。扭矩ta对应于惯性力fξr,扭矩tb对应于惯性力fκ。然后,可以计算扭矩ta和扭矩tb之和作为组合扭矩tc。
[0144]-在上述实施例中的每个实施例中,没有必要改变推导时刻tma。在这种情况下,发动机不必是火花点火型发动机。
[0145]-动力传递装置可以具有不同于第一实施例中描述的动力传递装置50的配置。例如,动力传递装置可以配置成仅包括一个电动发电机。
[0146]-第一控制装置110不限于包括cpu和存储程序的存储器并执行软件处理的配置。换句话说,第一控制装置110具有以下配置(a)至(c)中的任何一个。
[0147]
(a)第一控制装置110包括根据计算机程序执行各种过程的一个或多个处理器。处理器包括cpu和存储器,诸如ram和rom。存储器存储被配置为使cpu执行该过程的程序代码或命令。存储器,即计算机可读介质,包括通用或专用计算机可访问的任何可用介质。
[0148]
(b)第一控制装置110包括执行各种过程的一个或多个专用硬件电路。专用硬件电路的示例可以包括专用集成电路,即asic或fpga。asic是“专用集成电路”的缩写,fpga是“现场可编程门阵列”的缩写。
[0149]
(c)第一控制装置110包括根据计算机程序执行各种过程的一部分的处理器和执行各种过程的其余过程的专用硬件电路。
[0150]-第二控制装置120不限于包括cpu和存储程序的存储器并执行软件处理的配置。换句话说,第二控制装置120具有上述配置(a)至(c)中的任何一个。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。