1.本实用新型涉及示教器材设计、制造技术领域,尤其是一种教学用双气源交替驱动仿生爬虫。
背景技术:
2.近些年来,仿生机器人在学生教学中得到广泛的应用,以增强学生对所学知识的理解及灵活运用。以仿生爬虫为例,其是一种典型的仿生机器人,具有冗余度高、横截面小、模块化等特点,能适应粗糙、崎岖、复杂的地形,在灵活性与功能性上有着其他种类机器人不具备的独特优势。
3.在实际应用中,仿生爬虫可以采取蠕动行走模式顺利地通过狭窄空隙,以适用于狭小空间。现有的仿生爬虫主要由仿生虫身和多个舵机等几部分构成。仿生虫身由橡胶注塑而成。多个舵机均内置、固定于仿生虫身,且沿着仿生虫身长度方向进行均布。如此,一方面,仿生爬虫设计结构较为复杂,且要求极高的装配精度,最终制造、采购成本居高不下;另一方面,当仿生爬虫实际执行蠕动行走模式时,各个舵机需相互协作,运动控制程式极为复杂,青年学生难以进行轻松控制。因而,亟待本课题组解决上述问题。
技术实现要素:
4.故,本实用新型课题组鉴于上述现有的问题以及缺陷,乃搜集相关资料,经由多方的评估及考量,并经过课题组人员不断探讨以及设计改进,最终导致该教学用双气源交替驱动仿生爬虫的出现。
5.为了解决上述技术问题,本实用新型涉及了一种教学用双气源交替驱动仿生爬虫,其包括仿生虫身、进气软管、正压式气体发生器、负压式气体发生器以及换向阀。仿生虫身的径向变形被限制,且其内成型出一空气腔。进气软管插配于仿生虫身上,且始终与空气腔相贯通。正压式气体发生器、负压式气体发生器借由换向阀以交替地与进气软管相导通。在某一时间段内,正压式气体发生器作功,仿生虫身因其空气腔被充入正压气体而伸长。在下一时间段内,负压式气体发生器作功,仿生虫身因其空气腔被充入负压气体而缩短。仿生虫身在由伸长状态向着缩短状态切换的进程中,其凭借与地面之间所形成的摩擦力以完成一次前行蠕动动作。
6.作为本技术方案的进一步改进,仿生虫身包括有橡胶体和限形组件。空气腔成型于橡胶体内。限形组件用来限制橡胶体的径向膨胀或径向收缩形变,其由多个镶嵌于橡胶体内部的、且沿着橡胶体长度方向进行线性排布的刚性限形环构成。
7.作为本技术方案的更进一步改进,沿其长度方向,在橡胶体的外侧壁上成型出有一系列环形抓地凸缘。环形抓地凸缘呈后倾状,且倾斜角度控制在10~30
°
。
8.作为本技术方案的更进一步改进,仿生虫身还包括有安装座。安装座被用来直接负担所述进气软管,其与橡胶体的后端部或前端部相套合。
9.作为本技术方案的更进一步改进,在安装座上开设有一供进气软管穿入的、与空
气腔直接贯通的第一插配通孔。
10.当然,作为上述技术方案的另一种改型设计,在安装座内成型出有一均压空腔。由安装座的外端面向内延伸出一用来插配进气软管的、且与均压空腔相贯通的第二插配通孔。由安装座的内端面向外延伸出有多个用来连通均压空腔和空气腔的均压通孔。
11.相较于传统设计结构的仿生爬虫,在本实用新型所公开的技术方案中,采取充入压力气体方式对其进行驱动。当预使仿生爬虫执行蠕动动作时,正压式气体发生器和负压式气体发生器协同作用,以交替地向着仿生虫身空气腔充入正压气体、负压气体,仿生虫身在伸长状态和缩短状态之间进行切换。且由伸长状态向着缩短状态切换的进程中,仿生虫身凭借与地面之间所形成的摩擦力以完成一次前行蠕动动作。
12.通过采用上述技术方案进行设置,教学用双气源交替驱动仿生爬虫具有较为简洁的设计结构,利于进行制造、成型,有效地降低了制造成本;再者,在实际操作中,学生通过对正压式气体发生器和负压式气体发生器的充气压力、充气时长以及切换频率进行调整即可实现对仿生爬虫蠕动姿态、速度的控制,易于操作、实施,可有效地提升学生的参与积极性。
附图说明
13.为了更清楚地说明本实用新型实施例或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本实用新型的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
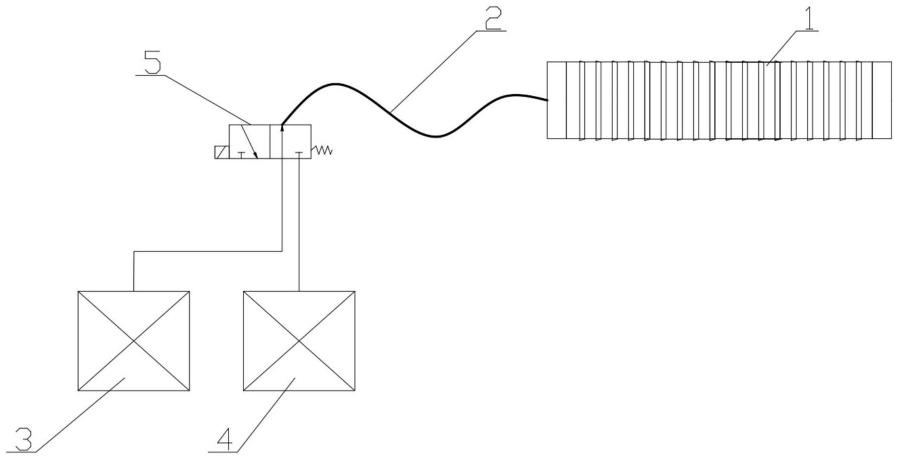
14.图1是本实用新型中教学用双气源交替驱动仿生爬虫第一种实施方式的结构示意图。
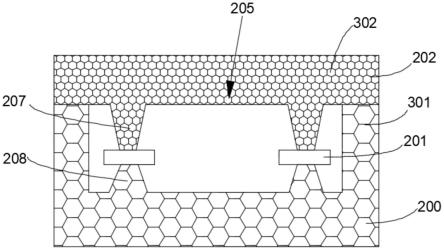
15.图2是本实用新型教学用双气源交替驱动仿生爬虫第一种实施方式中仿生虫身的结构示意图(进气软管以双点划线示意)。
16.图3是图2的主视图。
17.图4是图3的a-a剖视图。
18.图5是图4的i局部放大图。
19.图6是本实用新型教学用双气源交替驱动仿生爬虫第二种实施方式中仿生虫身的纵剖视图(进气软管以双点划线示意)。
20.1-仿生虫身;11-橡胶体;111-空气腔;112-环形抓地凸缘;12-限形组件;121-刚性限形环;13-安装座;131-第一插配通孔;132-均压空腔;133-第二插配通孔;134-均压通孔;2-进气软管;3-正压式气体发生器;4-负压式气体发生器;5-两位三通换向阀。
具体实施方式
21.下面结合具体实施例,对本实用新型所公开的内容作进一步详细说明,图1示出了本实用新型中教学用双气源交替驱动仿生爬虫第一种实施方式的结构示意图,可知,其主要由仿生虫身1、进气软管2、正压式气体发生器3、负压式气体发生器4以及两位三通换向阀5等几部分构成。其中,仿生虫身1为弹性体,其径向变形被有效限制,仅可发生轴向伸长或缩短形变。在满足上述设计要求的前提下,出于尽可能地降低其成型困难度以及成本方面
考虑,仿生虫身1优选由橡胶体11和限形组件12构成。橡胶体11为橡胶注塑件,且在其内成型出有一空气腔111。限形组件12用来限制橡胶体11的径向膨胀或径向收缩形变,其由多个镶嵌于橡胶体11内部的、且沿着橡胶体长度方向进行线性排布的刚性限形环121构成。进气软管2插配于橡胶体11上,且始终与空气腔111相贯通(如图2-4中所示)。正压式气体发生器3、负压式气体发生器4借由两位三通换向阀5以交替地与进气软管2相导通。
22.当预使仿生爬虫执行蠕动动作时,正压式气体发生器3和负压式气体发生器4协同作用,以交替地向着仿生虫身1的空气腔111中充入正压气体、负压气体,仿生虫身1在伸长状态和缩短状态之间进行切换。在某一时间段内,正压式气体发生器3作功,仿生虫身1因其空气腔111被充入正压气体而伸长。在下一时间段内,负压式气体发生器4作功,仿生虫身1因其空气腔111被充入负压气体而缩短。且由伸长状态向着缩短状态切换的进程中,仿生虫身1凭借与地面之间所形成的摩擦力以完成一次前行蠕动动作。
23.在实际应用中,该设计结构的教学用双气源交替驱动仿生爬虫至少取得了以下几方面的有益效果,具体如下:
24.1)教学用双气源交替驱动仿生爬虫具有较为简洁的设计结构,利于进行制造、成型,从而有效地降低了制造成本;
25.2)在实际操作中,学生通过对正压式气体发生器3和负压式气体发生器4的充气压力、充气时长以及切换频率进行调整即可实现对仿生爬虫蠕动姿态、速度的控制,易于操作、实施,可有效地提升学生的参与积极性。
26.在此还需要说明一点,在娱乐于教的进程中,通过对仿生爬虫进行实际操作,还可使得学生对气压动力学有着一定的了解,利于其对所学各科知识进行融会贯通,以为其后续的设计、研发工作作良好的铺垫。
27.出于确保仿生爬虫得以沿着特定方向进行定向蠕动,且保证其在蠕动进程中具有足够的抓地力方面考虑,由图5中所示,沿其长度方向,优选在橡胶体11的外侧壁上成型出有一系列环形抓地凸缘112。环形抓地凸缘112呈后倾状,且倾斜角度θ控制在10~30
°
。如此,在橡胶体11因受到正压气体作用而伸长进程中,环形抓地凸缘112沿着地面进行滑移,从而实现了仿生虫身的单次蠕动动作;而在橡胶体11因受到负压气体作用而缩短进程中,环形抓地凸缘112与地面形成稳定抓地力,以限制仿生虫身的后退动作,由此正压式气体发生器3和负压式气体发生器4交替作用,以使得仿生虫身持续地蠕动。
28.再者,出于保证进气软管2得以可靠地组装于橡胶体11上,进而确保橡胶体11向着空气腔111得以持续、稳定地供应正压气体、负压气体方面考虑,由附图2-4中所示,仿生虫身1还增设有安装座13。安装座13被用来直接负担进气软管2,其与橡胶体11的后端部相套合。在安装座13上开设有一供进气软管2穿入的、与空气腔111直接贯通的第一插配通孔131。在实际执行进气软管2的插配操作时,预先在进气软管2的外侧壁上涂覆一层胶水,当其相对于第一插配通孔131被插入到位后,经过一段时间的等待胶水即发生固化,从而实现了第一插配通孔131在安装座13上的可靠插配。
29.图6示出了本实用新型教学用双气源交替驱动仿生爬虫第二种实施方式中仿生虫身的纵剖视图,其同样由正压式气体发生器3和负压式气体发生器4交替进行作用,以实现其自身的向前持续蠕动。第二种实施方式相较于上述第一种实施方式的区别点在于:在安装座13内成型出有一均压空腔132。由安装座13的外端面向内延伸出一用来插配进气软管2
的、且与上述均压空腔132相贯通的第二插配通孔133。由安装座13的内端面向外延伸出有多个用来连通均压空腔132和空气腔111的均压通孔134。在预实现对仿生爬虫的蠕动驱动时,经由进气软管2而被泵入的正压气体、负压气体最先进入到均压空腔132中,经过扰流混合后才得以经由均压通孔134而进入到空气腔111中。如此,可确保正压气体以及负压气体得以平缓地进入到空气腔111中,进而满足了橡胶体11得以平稳地发生伸长或缩短形变的设计要求,不但可大大地提升仿生爬着执行蠕动动作的平稳性、可靠性,而且还为橡胶体11使用寿命的大幅度提高作了良好的铺垫。
30.对所公开的实施例的上述说明,使本领域专业技术人员能够实现或使用本实用新型。对这些实施例的多种修改对本领域的专业技术人员来说将是显而易见的,本文中所定义的一般原理可以在不脱离本实用新型的精神或范围的情况下,在其它实施例中实现。因此,本实用新型将不会被限制于本文所示的这些实施例,而是要符合与本文所公开的原理和新颖特点相一致的最宽的范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。