1.本公开涉及智能眼镜测试领域,具体而言,涉及一种智能眼镜视觉成像测试平台。
背景技术:
2.随着近眼显示技术及穿戴设备的发展,智能可穿戴电子产品逐渐进入消费市场。其中,ar(增强现实,augmented reality)、vr(虚拟现实,virtual reality)、mr(混合现实,mixed reality)、xr(扩展现实,extended reality)等智能眼镜得到不同客户群体的关注。其中,扩展现实包括增强现实(ar),虚拟现实(vr),混合现实(mr)等多种形式。换句话说,xr其实是一个总称,包括了ar,vr,mr。xr分为多个层次,从通过有限传感器输入的虚拟世界到完全沉浸式的虚拟世界。
3.在本公开中,智能眼镜(smart glass)是可穿戴智能产品的一种,包括但不限于ar(augmented reality 增强现实)、mr(mixed reality 混合现实)、vr(virtual reality 虚拟现实)、cr(cinematic reality 扩展现实)等xr产品形态。
4.在结构上,智能眼镜分为单目和双目两种,例如ar眼镜可分为单目和双目两种。单眼产品由于可视角小等多种因素导致用户实际体验欠佳,双目产品因具备更大可视区域具有较好用户体验逐渐成为市场主流。
5.无论对于单目或双目产品,为了避免成像不对准导致的晕眩感,尤其是双目产品双目视觉成像耦合的精度不足导致的晕眩感会极大影响用户体验,对智能眼镜的视觉成像耦合精度进行测试是必要的。
技术实现要素:
6.根据本公开的一方面,提供了:
7.一种智能眼镜视觉成像测试平台,其中,其包括:
8.位置可调的相机安装平台,
9.位置可调的光引擎安装平台,用于安装待测智能眼镜的光引擎并且所述光引擎可经由所述光引擎安装平台进行位置调节,
10.位置可调的镜片安装平台,用于安装待测智能眼镜的镜片,所述镜片能够接收来自所述光引擎发射的光并显示成像,并且所述镜片可经由所述镜片安装平台进行位置调节,
11.相机,其布置于所述相机安装平台上并且能够面朝所述镜片以获取和输出所述镜片的成像,所述相机可经由所述相机安装平台进行位置调节。
12.可选地,根据本公开的一种实施方式,所述待测智能眼镜包括单目的或双目的ar、vr或mr智能眼镜。
13.可选地,根据本公开的一种实施方式,所述智能眼镜视觉成像测试平台包括平台基座和安装于所述平台基座上的移动平台,所述相机安装平台、所述光引擎安装平台和/或所述镜片安装平台布置于所述移动平台上并且能够通过所述移动平台进行位置调节。
14.可选地,根据本公开的一种实施方式,所述平台基座包括螺纹孔,所述螺纹孔形成螺纹孔排列。
15.可选地,根据本公开的一种实施方式,所述移动平台包括滑轨滑块式移动平台,或者所述镜片安装平台包括滑轨滑块式移动台。
16.可选地,根据本公开的一种实施方式,所述相机安装平台包括第一平面移动台和第一高度升降台。
17.可选地,根据本公开的一种实施方式,所述光引擎安装平台包括第二平面移动台和第二高度升降台。
18.可选地,根据本公开的一种实施方式,所述光引擎安装平台包括仰角器和旋转台。
19.可选地,根据本公开的一种实施方式,所述镜片安装平台包括布置在所述滑轨滑块式移动台上的立柱,在所述立柱上套装有转轴器,所述转轴器内还套设有悬挂杆,所述转轴器可沿所述立柱和所述悬挂杆移动,用于安装所述镜片的镜片固定装置连接至所述悬挂杆。
20.可选地,根据本公开的一种实施方式,所述镜片固定装置包括镜片固定框和镜片固定板,所述镜片固定框包括开孔用于安装所述镜片,所述镜片固定框经由所述镜片固定板连接至所述悬挂杆。
21.可选地,根据本公开的一种实施方式,所述悬挂杆包括多个螺孔,用于固定所述镜片固定装置。
22.可选地,根据本公开的一种实施方式,所述相机安装平台、所述光引擎安装平台和所述镜片安装平台为模块化结构。
23.可选地,根据本公开的一种实施方式,所述开孔的周缘构造成与所述镜片形状配合。
24.可选地,根据本公开的一种实施方式,所述镜片固定框和所述镜片固定板由peek、ptfe或pi制成。
25.本公开实施例所提供的智能眼镜视觉成像测试平台,至少部分地实现了下述技术进步中的一个或多个:
26.1、采用滑块-滑轨结构的快速定位及6轴升降平台的精密定位的二级调节位置精度的组合方式,在适用于双目眼镜时可以实现双光引擎在空间任意位置的快读、精确定位,该空间位置包括前后、左右、上下、俯仰及旋转;
27.2、测试方案模块化平台搭建,可以根据不同应用场景的需求,任意组合移动模块;
28.3、低成本,有利于批量生产组建和商业上大规模使用;
29.4、通过自动化的模块搭建,大量节省了测试时间;
30.5、使用范围广泛,该套方案可匹配任意形态的ar眼镜产品的光学耦合测试;同时也可以适用于vr、mr等其它类型的光学耦合测试。
附图说明
31.参考附图,本公开的上述以及其它的特征将变得显而易见,其中,
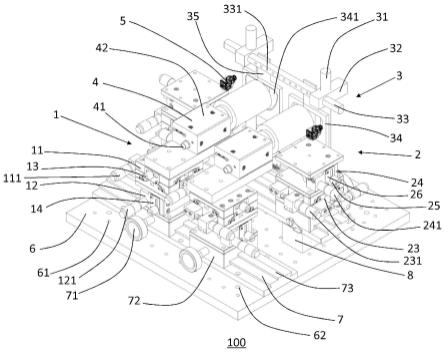
32.图1从一个角度示出了根据本公开实施例的一种智能眼镜视觉成像测试平台的整体结构示意图;
33.图2从另一个角度示出了根据本公开实施例的一种智能眼镜视觉成像测试平台的整体结构示意图;
34.图3示出了根据本公开实施例的一种平台基座结构示意图;
35.图4示出了根据本公开实施例的一种移动平台结构示意图;
36.图5示出了根据本公开实施例的一种相机安装平台结构示意图;
37.图6从一个角度示出了根据本公开实施例的一种光引擎安装平台结构示意图;
38.图7从另一个角度示出了根据本公开实施例的一种光引擎安装平台结构示意图;以及
39.图8示出了根据本公开实施例的一种镜片安装平台结构示意图。
具体实施方式
40.容易理解,根据本公开的技术方案,在不变更本公开实质精神下,本领域的一般技术人员可以提出可相互替换的多种结构方式以及实现方式。因此,以下具体实施方式以及附图仅是对本公开的技术方案的示例性说明,而不应当视为本公开的全部或者视为对本公开技术方案的限定或限制。
41.在本说明书中提到或者可能提到的上、下、左、右、前、后、正面、背面、顶部、底部等方位用语是相对于各附图中所示的构造进行定义的,它们是相对的概念,因此有可能会根据其所处不同位置、不同使用状态而进行相应地变化。所以,也不应当将这些或者其他的方位用语解释为限制性用语。此外,术语“第一”、“第二”、“第三”等或类似表述仅用于描述与区分目的,而不能理解为指示或暗示相应的构件的相对重要性。
42.参考图1和图2,分别从两个不同的角度示出了根据本公开实施例提供的一种智能眼镜视觉成像测试平台的整体结构示意图。
43.在本公开的实施例中,智能眼镜视觉成像测试平台100,包括:
44.位置可调的相机安装平台1,
45.位置可调的光引擎安装平台2,用于安装待测智能眼镜的光引擎5并且所述光引擎5可经由所述光引擎安装平台2进行位置调节,
46.位置可调的镜片安装平台3,用于安装待测智能眼镜的镜片,所述镜片能够接收来自所述光引擎5发射的光并显示成像,并且所述镜片可经由所述镜片安装平台3进行位置调节,
47.相机4,其布置于所述相机安装平台1上并且能够面朝所述镜片以获取和输出所述镜片的成像,所述相机4可经由所述相机安装平台1进行位置调节。
48.需要说明的是,这里的“位置调节”和“位置可调”等类似表述具有广义的含义,其不仅包含了常规意义下的位置调节,还可以涵盖角度调节或者朝向调节,也就是说,常规意义下的位置和/或角度调节均落入了本技术中的位置可调的语义范围内。此外,根据上述技术方案可知,除了本身可调的各平台之外,分别能够安装在其上的物体,即相机、光引擎和镜片也是可调的,也就是说本技术方案实现了这些物体的多级调节。特别地,平台和物体的调节幅度和精度可以不同,例如,平台的调节幅度较大、精度较低,而物体的调节幅度较小,而精度较高,前者的好处是调节速度较大,类似于粗调节,后者类似于精调节,二者结合能够综合实现较高的调节效率和准确度,并且可以最大化地节约测试时间。另外,平台一词也
应当广义理解,而不能仅仅理解成一种平面状的支撑台,而是广义地指为测试、安装或操作用的工作设施。
49.还应当理解,智能眼镜具有自己的光引擎和镜片,所谓的光引擎又称光机,其中,光引擎用于在发射路径上发射照明光束,并且可选地还能够将照明光束调制成图像光,再将该图像光传输至投影成像系统,例如智能眼镜的镜片,以通过该投影成像系统将该图像光投影成像。相机则用于获取在镜片上的成像,并且输出给测试人员。
50.举例来说,相机4在背对镜片安装平台3的一侧具有输出端41,所述输出端41可以连接电脑显示屏,以便测试人员从显示屏中查看和评估智能眼镜镜片的成像效果,例如,成像效果以谱线的形式来呈现,并且根据显示效果的情况实时调节光引擎、相机和/或镜片的位置,以得到理想的光引擎和镜片之间的位置关系,这种位置关系可以在智能眼镜的研发阶段中为产品的研制提供可靠的原始数据以及测试方案,供有关人员参考。当然,电脑端还可以包括对成像数据进行处理的软件,例如滤波、耦合(例如在测试双目智能眼镜的情况下)等,再将处理后的结果输出至显示屏。
51.对于这些物体的具体布置位置,在图中示例性的是,所述光引擎5布置于所述光引擎安装平台2的一角处,具体为其高度升降台的一角处并且面朝镜片方向,相机4则对准镜片,以便于准确捕捉镜片的成像。光引擎和相机可以通过常见的固定方式,例如螺纹紧固的方式、例如螺钉固定至相应的平台上。在相应的平台上开设有多个不同位置的螺纹孔,因此这些螺纹孔为光引擎或相机提供了多种不同的固定位置,也是一种位置调节的方式。
52.考虑到示例的光引擎和相机的尺寸差异,光引擎可以通过一个螺钉与螺纹孔配合固定,而相机可以通过多个螺钉和螺纹孔配合的方式进行固定,例如在相机的立方体形的壳体42底面的矩形四角处进行固定,以保证相机的位置稳定性。
53.尽管上述以举例的方式说明了固定方式,但这并不是限制性的,其它常见的固定方式,例如磁吸、粘结、卡合等,亦可以适用。
54.应当理解,本平台既可以用于对单目的智能眼镜进行测试,也可以用于测试双目的智能眼镜,图中为后者的情况。在双目智能眼镜的情况下,应当知晓的是,采用两个各类平台以及相应的相机、光引擎和镜片来实现测试工作。如上所述,测试过程中的双目各自成像的耦合由电脑端完成。此外,也可以理解的是,镜片、相机、光引擎和相应的平台各自对称地进行布置,以便符合智能眼镜使用时的实际情况。由此在双目智能眼镜的测试用途中,本平台可用于解决双光引擎双目显示下光学影像画面耦合模糊、眩晕等问题,从而实现稳定、优质的显示画面。
55.示例性地,所述智能眼镜视觉成像测试平台100包括平台基座6和安装于所述平台基座6上的移动平台7,所述相机安装平台1、所述光引擎安装平台2和/或所述镜片安装平台3布置于所述移动平台7上并且能够通过所述移动平台7进行位置调节。
56.在本公开的一些实施例中,如图所示,所述相机安装平台1和所述光引擎安装平台2布置于所述移动平台7上,并用螺钉进行固定,而所述镜片安装平台3具有自己的移动平台(将在下文具体描述)。
57.由此可见,移动平台7实现了对于相应的平台的位置的移动调节,这种移动调节可以对应于前文已经提交的粗调节。由此,相应的平台本身只需要设计精调节就足够。当然,所述镜片安装平台3也可以布置于所述移动平台7上。平台基座6为整个测试平台提供了支
撑和搭建的基础,其可以布置于整个测试场地的地面上。
58.参考图3,其示出了根据本公开实施例的一种平台基座结构示意图。
59.可见的是,所述平台基座6包括螺纹孔61,多个所述螺纹孔61形成螺纹孔排列,例如以矩阵的方式。也就是说,布置于所述平台基座6上的相应的平台能够通过螺纹紧固件、例如螺钉与螺纹孔61的配合实现在所述平台基座6上的固定。螺纹孔排列则为相应的平台提供了多个固定位置,相应的平台可以稳固地利用多个螺纹孔进行固定,并且还可以通过不同的螺纹孔实现固定位置的改变。
60.在一些实施例中,所述平台基座6构造成具有矩形横截面的立方体,在其上的螺纹孔61彼此等距离地间隔开并且具有相同的规格,以便于相应的平台的位置计算。
61.在一些实施例中,在平台基座6的四角处开设了较大的定位孔62,用于与地面进行固定。
62.应当理解,所述螺纹孔61还可以是标准螺纹孔,也就是说标准化的螺纹紧固件与所述标准螺纹孔相配合。螺纹孔矩阵间距和孔数可以根据实际场景进行设计。
63.参考图4,其示出了根据本公开实施例的一种移动平台结构示意图。
64.所述移动平台7包括滑轨滑块式移动平台,或者所述镜片安装平台3包括滑轨滑块式移动台(结合图2可见)。应当理解,所谓滑轨滑块式是指滑轨在下、滑块在上,从而滑块可以沿着滑轨进行移动的布置方式。
65.在一些实施例中,滑轨滑块式移动平台包括锁紧机构,例如图4的用于移动平台7的锁紧机构71,以便在滑块72于滑轨73上的位置确定下来之后将滑块72进行位置锁止。
66.例如,所述锁紧机构71以按钮或旋钮的形式设计,并布置于所述滑块72的一侧。每个滑块72可以配属于一个相应的平台。例如,所述滑块72构造成立方体形,在其上侧面开设有多个定位孔,用于平台的各零件的定位。通过滑轨73上的测距标尺或者标距刻度或其它距离检测方式来读取滑块72的位置。滑轨滑块式的设计具有稳定、可控的移动特性,并且结构简约、紧凑,实现成本低。本文中还涉及其它平台的滑轨滑块式设计也可以参考移动平台7进行解读,在后文不再详细赘述。
67.参考图5、6和7,分别示出了根据本公开实施例的一种相机安装平台结构示意图以及从两个不同角度的根据本公开实施例的一种光引擎安装平台结构示意图。
68.所述相机安装平台1和所述光引擎安装平台2具有各自的平面移动台和高度升降台,即相机安装平台1的第一平面移动台11和第一高度升降台12,以及光引擎安装平台2的第二平面移动台23和第二高度升降台24。
69.例如,平面移动台可以是滑轨滑块式平面移动台,用于在垂直于高度方向的平面内进行位置调节。平面移动台可以布置于高度升降台的上方,可通过螺钉进行固定,二者的布置位置也可以进行互换。
70.例如,所述平面移动台和所述高度升降台均构造成立方体,在其上均可设置有锁紧机构和测距标尺,例如相机安装平台1的锁紧机构13、测距标尺和光引擎安装平台2的锁紧机构25、测距标尺,其中,锁紧机构分别用于对平面移动台和高度升降台的运动进行锁止,而测距标尺用于读取平面内数据或者高度数据,便于测试的数据记录以及位置测定。
71.在一些实施例中,每个锁紧机构负责一个方向的加解锁,并且设置在各平台的一侧。此外,在平面移动台或高度升降台上构造有多个螺纹孔,用于分别为其上的零件提供多
个固定位置。其中,测距标尺可以构造于各移动调节器的表面上,可参考外径千分尺的标准结构。锁紧机构则可以具体构造成一种按钮或者旋钮,其可以穿过相应的引导片(例如相机安装平台1的引导片14或光引擎安装平台2的引导片26)的开孔来固定至相应的移动或升降平台上,然后在释放的情况下与引导片间隔开并且随平台移动,在需要锁紧时与引导片接触并卡紧,锁止平台的移动。由此还可知的是,引导片的开孔还作用为锁紧机构的限位件,即限制了平台移动的范围。各调节器可以构造成手动调节旋转手轮,测试人员通过逆时针或者顺时针操作该旋转手轮,实现对应平台的两个相对方向的运动控制。
72.尽管本公开没有明确描述的,所用的测距标尺可以为数显标尺、电子标尺等形式,以便快速读出和数字化向其它设备提供检测数据。
73.本文中上面提到的、包括下面还要提到的各类移动台和高度台的调节方式可以为手动、气动及电动等其它调节方式。本文以手动调节为例。例如在图中设计了第一平面移动台11的平面移动调节器111和第一高度升降台12的高度升降调节器121,以及第二平面移动台23的平面移动调节器231和第二高度升降台24的高度升降调节器241,测试人员可以直接通过手动操作这些调节器来实现所需平台的位置调节。此外,本文中所涉及的各种移动平台的传动方式可以为齿条式或滚珠式等方式,图中以齿条式传动为例。
74.举例来说,所述第一平面移动台11构造成彼此通过螺钉连接的多件式平台,包括第一子平台112和第二子平台113。所述第一子平台112可移动地布置在所述第二子平台113上。所述平面移动调节器111连接于第一子平台112的一侧,测试人员通过手动操作所述平面移动调节器111来带动所述第一子平台112相对于所述第二子平台113做相应的移动,从而完成了第一平面移动台11的移动需要。其它移动台和高度台的工作原理可以类似地进行理解,之后不再赘述。就此而言,引导片的下端固定于第二子平台113上,而引导片开孔开设于第一子平台112处,从而实现锁紧机构的释放与解锁功能。
75.在一些实施例中,参考图6、图7,所述光引擎安装平台2包括仰角器21和旋转台22。所述旋转台22和所述仰角器21例如上下布置,并且所述仰角器21布置于所述第二高度升降台24上。应当理解,所述旋转台22用于在垂直于高度方向的平面内进行旋转调节,所述仰角器21用于在俯仰方向上进行角度调节。与平面移动台和高度升降台相类似地,所述旋转台22和所述仰角器21也具有各自的角度标尺,例如所述旋转台22的角度标尺221,用于表示当前的角度。所述仰角器21和所述旋转台22的工作原理也可以参照平面移动台和高度升降台进行解读。例如,所述仰角器21呈现为立方体形,而所述旋转台22呈现为扁平的圆柱形,在其上开设有若干螺纹孔,用于为光引擎提供多个可选择的固定位置。第二平面移动台23、第二高度升降台24、仰角器21及旋转台22之间可通过螺钉固定。还需要说明的是,仰角器21和旋转台22并非强制性的,而是可选的,如果测试工作不需要对光引擎的平面内角度和俯仰角度进行调节,则可以省去这两个零件。此外,相机安装平台1也可以不需要仰角器和旋转台。
76.参考图8,其示出了根据本公开实施例的一种镜片安装平台结构示意图。
77.所述镜片安装平台3具有布置在所述滑轨滑块式移动台上的立柱31,在所述立柱31上套装有转轴器32,所述转轴器32内还套设有悬挂杆33,所述转轴器32可沿所述立柱31和所述悬挂杆33移动,用于安装所述镜片的镜片固定装置连接至所述悬挂杆33。
78.应当理解,所谓的转轴器是用于实现在空间上相互成角度但是并不相交的两根杆
的固定,在本例中具体是用于所述立柱31和所述悬挂杆33。在这两根杆彼此垂直的情况下,所述转轴器32也可以被称作为90
°
转轴器。在此,所述立柱31构造成圆柱形并且竖直布置,而所述悬挂杆33设计成横截面为圆角矩形的柱体并且水平布置。通过转轴器的引入可以最终实现镜片安装位置的调节。
79.在使用中,测试人员可以首先通过所述镜片安装平台3自己的移动台36或者是移动平台7(取决于实际设计)进行移动调节,这种移动调节带动了立柱31和由此带动了转轴器32沿着悬挂杆33移动,实现了横向方向的位置调节。同时,转轴器32还可以沿着立柱31进行移动,实现了高度方向的位置调节。在位置调节均完成之后可以进行镜片固定装置的安装。此外,所述移动台36也可以同样设计成滑轨滑块式移动台,并配有相应的锁紧机构。在此,立柱31通过螺纹紧固件与滑块连接。
80.在一些实施例中,所述镜片固定装置包括镜片固定框34和镜片固定板35,所述镜片固定框34包括开孔341用于安装所述镜片,所述镜片固定框34经由所述镜片固定板35连接至所述悬挂杆33。为此,所述悬挂杆33也可以包括多个螺孔331,所述螺孔331彼此同规格并且等距离地间隔开,所述镜片固定板35在上端具有与该螺纹孔相匹配的一个或者多个螺纹孔,由此能够在多个不同的固定位置上与悬挂杆33连接。此外,为了实现稳固的固定,在每个固定位置处可以同时使用多个匹配的螺纹孔。所述镜片固定框34和所述镜片固定板35二者也可以通过螺钉进行连接。
81.在一些实施例中,所述镜片固定板35竖直布置并且在背离相机4的一侧从上至下跨越了所述镜片固定框34,因此所述镜片固定板35给所述镜片固定框34起到了加强和支撑的作用。
82.在一些实施例中,所述开孔341的周缘构造成与所述镜片形状配合,以便精准实现智能眼镜的镜片在竖直平面内的角度变化。本例中,镜片安装平台3的移动平台采用分体式的滑轨滑块结构,当然也可以使用一体式的滑轨滑块结构。
83.为了防止在使用过程中造成智能眼镜镜片的划损,所述镜片固定框34和所述镜片固定板35可以由防刮材料制成。所述防刮材料例如可以是peek。peek是聚醚醚酮,属特种高分子材料,具有机械强度高、耐高温、耐冲击、阻燃、耐酸碱、耐水解、耐磨、耐疲劳、耐辐照及良好的电绝缘性能。其它的防刮材料,例如ptfe、pi等也可适用于本公开的实施例。
84.在一些实施例中,所述相机安装平台1、所述光引擎安装平台2和所述镜片安装平台3可构造为模块化结构。也就是说这些平台的具体组成部分可以是以模块结构进行组装、搭建的,由此各个组成部分可以根据实际需要进行增减,特别是模块化的设计便于流水线的自动化拆装,同时在方案设计层面上极大地增强了该套测试平台方案的通用性和易实现性,并且在经济层面上表现极佳地成本优势。
85.在一些实施例中,所述智能眼镜视觉成像测试平台100还具有垫高块8,以便在有需要时弥补相应的平台的高度升降台的高度调整幅度不够大的特点。所述垫高块8示例性地布置于所述平台基座6上,然后用于光引擎安装平台2的移动平台7布置于所述垫高块8上,完成垫高作用。应当理解,为了使相应的平台稳固固定,所述垫高块8在移动平台7的纵向方向上可以有间隔地布置多个,以均匀分摊支撑零件的重量。
86.应当理解的是,所有以上的优选实施例都是示例性而非限制性的,本领域技术人员在本公开的构思下对以上描述的具体实施例做出的各种改型或变形都应在本公开的法
律保护范围内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。
