1.本发明涉及处理光谱。更具体地,本发明涉及一种分析原子光谱领域和类似领域中的处理如中阶梯光栅光谱(echelle spectra)等二维光谱的方法。另外,本发明涉及一种产生用于处理光谱的模板的方法、涉及利用此模板并且涉及一种利用此方法的光谱处理装置和光学摄谱法装置。
背景技术:
2.众所周知的是使用光谱来分析各种应用中的物质。例如,在吸收光谱领域,来自光源的能量的一部分被特定波长的分析物吸收,留下未被吸收的能量的特征光谱。这种特征光谱使得可以标识分析物的化学组成。类似地,在发射光谱中,获得了由分析物释放的能量的特征光谱。这种光谱通常是一维的:光谱的波长可以绘制在一条线上。
3.在使用中阶梯光栅光谱仪和检测器的分析原子光谱法的现代方法中,关于分析物的化学组成的信息被包含在被称为中阶梯光栅图或中阶梯光栅光谱的二维光谱中。中阶梯光栅图的光谱峰的位置与特定元素特有的原子发射或吸收(取决于实验类型)波长相关。因此,光谱峰的位置含有关于样品中存在的元素的身份的信息。峰的强度表示存在的元素的量。原则上,中阶梯光栅图含有样品的完整原子组成谱。分析物的原子组成谱的准确度直接取决于光谱分量的位置和强度可以用其确定的精度。
4.典型中阶梯光栅光谱由可以含有光谱峰的带或段组成。在与中阶梯光栅光谱相关的文献中,段通常被称为“阶”,而峰通常称为“线”。为避免混淆,在本文档中,“线”一词旨在具有其字典含义,而“峰”一词用于指代中阶梯光栅光谱的强度峰。
5.由检测器捕获的二维光谱图像可能由于多种原因而退化。原始光谱可以具有宽动态范围,这在单次曝光中可能难以捕捉。检测器可以具有有限数量的捕获所关注光谱的像素。原始光谱可以含有多个噪声分量,可以含有背景结构,和/或可能在其段内部受到干扰(即重叠)。如果使用一维阵列检测器,则扫描二维光谱可能会引入进一步退化。
6.为了达到确定光谱峰的位置和强度时的期望准确度,通常对二维光谱进行处理,例如以补偿任何移位和/或以校准波长。此类处理技术的实例在d.a.sadler、d.littlejohn和c.v.perkins的论文“用于光谱仪和阵列检测器的自动波长校准程序(automatic wavelength calibration procedure for use with an optical spectrometer and array detector)”,《分析原子光谱学杂志(j.anal.at.spectrom.)》,1995,第10卷,第253-257页中提供。
7.美国专利us 7,876,435公开了一种用于确定和校正如中阶梯光栅光谱等复杂光谱中的宽带背景的方法。此已知方法包含记录光谱图、使记录的光谱图平滑化以及减小超过经平滑化的图的值。从初始图中减去所产生的背景图。通过使用移动平均进行图的平滑化。还描述了使用移动平均进行重复平滑化。
8.已经发现,简单的背景减法不足以准确地确定如中阶梯光栅光谱等二维光谱的位置和强度。进一步发现,通过使用移动平均来使光谱平滑化会导致分辨率损失,因此不适于
需要高准确度的应用。
9.j.c.hall等人的论文“减少光纤馈送的中阶梯光栅光谱图数据:方法和基于idl的分辨率程序(the reduction of fiber-fed echelle spectrograph data:methods and an idl-based solution procedure)”,《太平洋天文学会出版物(publications of the astronomical society of the pacific)》第106卷,1994年3月,第315-326页公开了从由ccd(电荷耦合装置)产生的光纤馈送的中阶梯光栅数据帧中提取天文物体的光谱。使用求平均来减少噪声。然而,求平均会降低准确度,这是光谱学领域通常不希望的。例如,hall等人在论文中描述的算法特别适于天文学领域的应用,但不太适于分析原子光谱学领域。
技术实现要素:
10.本发明的目的是克服现有技术的问题并提供一种用于处理光谱,具体地二维光谱的方法和装置,所述方法和装置在确定光谱,具体地但不排他地光谱的峰的位置和强度方面提供了更高的准确度。
11.根据第一方面,本发明提供了一种处理光谱的方法。根据第二方面,本发明提供了一种检测光谱中的段的方法,所述方法包括通过根据第一方面的方法产生模板并将所述模板与光谱匹配。根据第三方面,本发明提供了一种软件程序产品,所述软件程序产品允许处理器执行根据第一方面和第二方面中任一项所述的方法。根据第四方面,本发明提供了一种光谱处理装置,其被配置成用于执行根据第一方面和/或第二方面所述的方法。
12.因此,本发明提供了一种处理如中阶梯光栅光谱等二维光谱的方法,所述光谱包括具有相对高强度的被具有相对低强度的边界隔开的段,所述光谱已通过检测器数字化,所述方法包括:
[0013]-对光谱进行去噪;
[0014]-搜索所述光谱的至少一个系列的相邻局部极值;
[0015]-通过每个系列的相邻局部极值将线拟合,每条线表示一段;
[0016]-标识任何峰和其相应位置;以及
[0017]-存储所述线和任何峰的所述位置。
[0018]
通过对样品光谱进行去噪,可以显著提高样品光谱的信噪比,由此在无大量细节损失的情况下提高准确度。特别是,去噪为后续处理步骤准备了样品光谱。应当注意,去噪优选地不涉及平滑化,因为平滑化通常会导致数据丢失并因此导致准确度损失。
[0019]
通过搜索光谱的一个或多个系列的相邻局部极值,可以标识光谱的段。也就是说,如果相邻局部极值为局部最小值,则其可能表示段之间的边界。如果相邻局部极值为局部最大值,则其可能表示段的脊,所述脊通常将位于其边界之间的大约一半处。在一些实施例中,将检测局部最小值或局部最大值。然而,在其它实施例中,可以检测局部最小值和局部最大值两者。
[0020]
在使用二维阵列检测器以将光谱数字化的实施例中,可以确定阵列检测器的每列像素的局部极值。因此,局部极值为每个阵列检测器列的局部极值,并且对于阵列的每列像素,可以确定局部极值。根据光谱相对于阵列检测器的朝向,可以确定二维阵列检测器的每行像素的局部极值。应当理解,在使用扫描一维阵列检测器的实施例中,可以类似地确定局部极值,例如通过按每个单个(1d)阵列确定局部极值。
[0021]
借助于通过每个系列的或每串相邻局部极值串将线拟合,可以标识段之间的边界(在局部最小值的情况下)或段的脊(在局部最大值的情况下)以及因此光谱的单个段。当线限定段之间的边界时,每对线表示其所包围的段。每条线可以包括在多于一对线中,因为相邻的段可以共用限定其共同界线的线。当线限定段的脊时,每条单独的线可以被视为表示一段。
[0022]
应当注意,相邻局部极值可以包括最近的局部极值。也就是说,如果对于两个极值中的至少一个极值来说,另一个极值与其的距离是所有极值中最短的,则所述两个极值可以被称为相邻极值。所述距离可以使用任何合适的距离量度来表示,例如,欧几里德距离(euclidean distance,l2距离)或城市街区距离(city block distance,l1距离)。在实践中,图像像素的阵列的相邻列各自可以在同一行或仅在几行之外具有一个局部极值,由此使搜索一系列相邻极值变得简单。在一些实施例中,可以使用子采样,这潜在地使距离小于单个像素宽度。
[0023]
通过标识任何峰和其相应位置,确定了段的特性特征。峰的位置优选地相对于其段确定,所述段在中阶梯光栅光谱的情况下为阶。也就是说,峰的位置可以表明段标识(如阶数量)和相对于特定阶的位置参考。另外,可以确定峰的高度和/或强度。然而,可以设想其中不检测峰而仅检测段的实施例。
[0024]
通过将线或一对线以及任何峰的位置存储为模板,可以更快速且更高效地对另外的光谱进行处理,如稍后将更详细解释的。模板可以适于例如相同或相似分析物的一组光谱。
[0025]
所述方法可以进一步包括使用特征提取通过每个系列的相邻局部极值将线拟合。也就是说,将线拟合可以由特征提取技术辅助,以更好地将线拟合并减少可能导致离群值的噪声的影响。
[0026]
在根据本发明的方法中,特征提取可以包括应用霍夫变换(hough transform)。通过应用霍夫变换,可容易标识并排除或校正一系列极值中的离群值。原始霍夫变换在p.hough的美国专利us 3,069,654中公开,并且是基于极坐标的变换。已经发现,在局部极值的坐标已经例如通过使用霍夫变换而变换为极坐标时,通过二维光谱的极值将平滑的线拟合更有效。
[0027]
通过每个系列的相邻局部极值拟合的所述线可以是基本上平滑的线。即,线中的至少一些线可以是完全平滑的或至少主要平滑的。所拟合的线的平滑度例如可以通过测量连接三个连续像素的两条直线段之间的最小角度来确定。如果角度为至少1600,优选地至少1700,更优选地至少1750,则所述线可以被视为平滑的。
[0028]
如上所述的方法可以进一步包括使用边缘检测来搜索一系列相邻局部极值。也就是说,可以使用本身可能已知的边缘检测技术来寻找一系列局部极值并随后通过每个系列将线拟合。边缘检测技术的实例描述在p.perona和j.malik,“使用各向异性扩散的尺度空间和边缘检测(scale-space and edge detection using anisotropic diffusion)”《模式分析与机器智能汇刊(transactions on pattern analysis and machine intelligence)》第12卷,第7期,1990年7月,第629-639页。
[0029]
在根据本发明的方法中,所拟合的线相对于样品光谱的轴线的角度可以被限制到预定范围。在典型中阶梯光栅光谱中,阶相对于阵列检测器大致水平延伸,但是这当然将取
决于阵列检测器相对于成像光学器件的朝向。因此例如,角度显著偏离水平的任何所拟合的线都可能是有误差的,并且可能基于异常值。
[0030]
通过在基本上水平朝向的情况下将所拟合的线的角度限制为,例如与水平偏离小于300,或与水平偏离小于200,可以减小误差或完全避免误差。除了角度之外,还可以确定线的曲率。在此类实施例中,可以对线的曲率施加限制,例如通过要求曲率半径具有最小长度。即,使用段的角度和曲率处于一定范围内的先验知识,可以对所述段施加所述范围(或类似范围),由此限制任何检测误差的影响。
[0031]
样品光谱的局部极值可以包括局部最大值,在这种情况下,所拟合的线可以表示相应段的脊。段的脊可以基本上与所述段的轨迹重合。也就是说,如果段为阶,则脊可以表示阶的轨迹或总体朝向。
[0032]
可替代地或另外,光谱的局部极值可以包括局部最小值。在这种情况下,每条线可以表示段之间的边界。例如,每条线可以表示两个阶之间的边界。在一些实施例中,可以确定边界和脊两者。在一些实施例中,可以按对存储表示边界的线,由此将限定段(例如,阶)的边界的数据存储在一起。
[0033]
去噪可以包括应用全变分去噪(tvd)算法。如以上提到的,去噪将优于平滑化,因为平滑化通常会导致数据丢失。各种全变分去噪算法是本领域的技术人员已知的。基础算法描述于l.i.rudin、s.osher和e.fatemi的论文:“基于非线性全变分的噪声去除算法(nonlinear total variation based noise removal algorithms)”,《physica d杂志(physica d.)》60(1
–
4);259
–
268(1992)中,所述文献的整个内容通过引用在此并入。特别是,已经发现去噪特别适用于光谱学。还发现去噪,例如通过使用tvd算法,特别适于cid(电荷注入装置)检测器阵列,所述阵列通常每个像素具有1个a/d(模/数)转换器,这进而可能产生例如比ccd(电荷耦合装置)检测器阵列更高的暗电流中。
[0034]
根据本发明的方法可以进一步包括确定至少一个所标识的峰的强度。除了位置外,通过确定峰的强度或高度,可以获得对分析物的更好标识。
[0035]
所述至少一个所标识的峰的所确定位置可以包括所述峰所处的所述段的标识。即,除了阶内的相对位置和/或通过阵列检测器产生的像素阵列内的绝对位置之外,所述位置可以包含段标识(例如阶数量)。
[0036]
标识峰可以包括确定段内的(局部)最大值,例如脊的(局部或全局)最大值。尽管可以基于其它指标来标识峰,如体积或强度(例如考虑两个方向上的峰程度以及其高度),但确定(局部或全局)最大值是用于标识峰的有效且计算简单的方式。应当注意,在检测峰时,局部最大值可能不是按像素列或按像素行、按阶或按脊确定的。因此,峰可以由检测到的脊的局部最大值表示。因此,在搜索峰时,要检测两个方向(维度)上的局部最大值。
[0037]
根据本发明的方法可以进一步包括:
[0038]-在检测界线之前限定至少一个部分光谱,每个部分光谱小于所述光谱;以及
[0039]-检测每个单独的部分光谱的界线。
[0040]
即,可以限定一个或多个部分光谱,所述限定经受以上提到的方法步骤中的一些或全部。通过使用部分光谱而不是整个光谱,即使用子阵列而不是整个像素阵列,可以更快速且更高效地进行单独的方法步骤。可以限定至少两个部分光谱,并且可以限定更多部分光谱,如四个、八个、十二个、十六个、三十二个或更多个部分光谱。部分光谱的数量可以取
决于例如原始光谱和/或可用硬件的处理能力。部分光谱也可以被称为窗口或子图像。
[0041]
至少一些部分光谱可能不具有重叠,且因此不具有共同的像素。在部分光谱位于光谱的某些预定部分中,例如位于峰预期出现的部分中时,情况可能如此。在这种情况下,并非所有部分光谱都可能邻接另一个部分光谱。然而,至少一些部分光谱可以具有一些重叠。在一些实施例中,所有部分光谱可以具有至少一些重叠。部分光谱一起可以覆盖的区域小于所述光谱覆盖的区域,优选地小于所述光谱覆盖的区域的50%,更优选小于所述光谱覆盖的区域的25%,在一些情况下小于所述光谱覆盖的区域的10%,或者甚至小于所述光谱覆盖的区域的5%。然而,在一些实施例中,部分光谱可以一起覆盖整个光谱。
[0042]
光谱可以包括具有相对高信息密度的第一区域和具有相对低信息密度的第二区域。在这种情况下,部分光谱的第一部分可以至少部分地覆盖所述第一区域,并且所述部分光谱的第二部分可以至少部分地覆盖所述第二区域,而所述第一部分的所述线可以外推到所述第二部分。例如,在中阶梯光栅光谱中,光强度以及因此信息密度通常朝光谱的顶部和中间(假设光谱的通常朝向)较高,而信息密度通常朝左下角和右下角较低。通过将所拟合的线从第一较高信息密度部分外推到第二较低信息密度部分中,仍可能从光谱的第二部分中检索到足够的信息。也就是说,峰可以仍位于第二部分中,并且可以确定峰相对于其段的位置。
[0043]
至少一个部分光谱可以完全位于具有相对低信息密度的区域中,如典型中阶梯光栅光谱中的左下部区域和右下部区域。这样的部分光谱可以用于暗帧补偿,如暗帧减法。
[0044]
使用检测器的单次曝光可以将光谱完全数字化。在这种情况下,部分光谱可以从单个原始光谱提取。然而,在一些实施例中,部分光谱可以通过单独的部分曝光单独获得。这种部分曝光可以具有或可以不具有相同的曝光时间。因此,在一些实施例中,已使用不同的曝光时间对至少一些部分光谱数字化。也就是说,已使用不相同的曝光时间获得了两个或更多个部分光谱。不同曝光时间可以基于光谱的先验知识,如部分光谱的局部强度。位于具有相对低信息密度的区域中的部分光谱的曝光时间可能比预期最高峰的区域中的部分光谱的曝光时间更长。
[0045]
根据本发明的方法可以进一步包括将拟合在部分光谱中的线拟合在一起以提供平滑的线。拟合在部分光谱中的线可以是段的部分的界线和/或脊。相邻的部分光谱可以含有相同段的界线和/或脊。通过将这些线拟合在一起,段的界线和/或脊可以由两个或更多个部分光谱组装。通常,部分光谱可以被拟合或“拼接”在一起,其特征被拟合为便于提供部分光谱之间的平滑过渡。
[0046]
在部分光谱中检测到的和/或拟合的线(即,界线或脊)可以是基本上线性的线。可替代地,拟合在部分光谱中的线可以是基本上弯曲的线。这种基本上弯曲的线优选地由多项式描述。当使用多项式或另一种数学函数时,可以以数学方式描述构成边界和/或脊的线,由此允许对光谱进行数学处理。
[0047]
如以上提到的,光谱可以包括中阶梯光栅光谱,并且所述段可以包括中阶梯光栅光谱的阶。根据本发明的方法可以例如用于分析原子光谱法。
[0048]
本发明还提供了一种用于检测二维光谱中的段的方法,所述方法包括通过使用如上所述的方法产生模板。用于检测光谱中的段或带的方法可以进一步包括将光谱拟合在所述模板上。这可以涉及通过使用已知的形态学操作,如在至少一个维度但优选地两个维度
中移位、旋转、投影、拉伸和收缩光谱或模板进行图像调整。形态学操作可以通过使均方误差(mse)最小化来控制,即通过使光谱与模板之间的差异最小化。将光谱拟合在模板上在计算上可以比检测单个光谱的段更简单,在对一系列类似光谱进行处理时尤其如此。这种方法可以进一步包括将所述光谱的段与所述模板的段匹配。
[0049]
在一些实施例中,将所述二维光谱拟合到模板上是按部分光谱进行的。也就是说,每个部分光谱可以单独拟合到模板上。在一些实施例中,所述模板为整个光谱的模板,而在其它实施例中,可以产生部分光谱中的至少一些部分光谱的单独部分模板。在一些实施例中,整个光谱的模板可以仅用于一个或多个部分光谱。
[0050]
本发明进一步提供了一种用于执行上述方法的软件程序产品。所述软件程序产品可以包括指令所存储的有形载体,所述指令允许处理器执行根据本发明的方法步骤。所述有形载体可以包含便携式存储器装置(如dvd或usb棒)或非便携式存储器装置,例如,作为处理单元的一部分的存储器装置。
[0051]
本发明仍进一步提供了一种光谱处理装置,其包括具有相关联的存储器的处理器,其中所述处理器被配置成用于执行如上所述的方法。在一实施例中,根据本发明的光谱处理装置进一步包括用于将光谱数字化的检测器,如二维阵列检测器。
[0052]
本发明又进一步提供了一种光学摄谱法装置,更具体地,光谱仪,其包括用于产生二维光谱的光源和如上所述的光谱处理装置。
附图说明
[0053]
图1示意性地示出了可以利用本发明的用于光谱法的装置。
[0054]
图2示意性地示出了可以用于本发明方法中的中阶梯光栅图。
[0055]
图3示意性地示出了图2的中阶梯光栅图的一系列阶。
[0056]
图4示意性地示出了在噪声存在的情况下中阶梯光栅图的一系列阶。
[0057]
图5示意性地示出了使用窗口来分析二维光谱。
[0058]
图6示意性地示出了根据本发明的方法的第一实施例。
[0059]
图7示意性地示出了根据本发明的方法的第二实施例。
[0060]
图8示意性地示出了图7的方法的子步骤。
[0061]
图9示意性地示出了图7的方法的另外的子步骤。
具体实施方式
[0062]
本发明可以应用于分析原子光谱法领域,例如应用于处理通过用于化学分析的光谱仪获取的二维光谱(例如2d中阶梯光栅图)的领域。这样的光谱可以通过使用可以是光学发射光谱仪或吸收光谱仪的中阶梯光栅光谱仪来产生。可以使用几种源,如icp(电感耦合等离子体)、mip(微波诱导等离子体)或其它等离子体,或如火花、电弧、激光或火焰源等其它光谱源。光谱可以使用合适的检测器,具体地阵列检测器,如ccd(电荷耦合装置)、cmos(互补金属氧化物半导体)、cid(电荷注入装置)或其它类型的阵列检测器,来检测和数字化,但cid检测器阵列特别合适。cid成像布置描述于例如美国专利us 8,018,514(赛默飞世尔科技公司(thermo fisher scientific))中,所述美国专利的公开内容通过引用并入本文。光学发射光谱仪描述于例如美国专利应用us 2019/0107437(赛默飞世尔科技公司)中,
所述美国专利的公开内容通过引用并入本文。
[0063]
本发明寻求提供一种允许快速且高效地处理如中阶梯光栅光谱等二维光谱,由此使半实时甚至实时处理成为可能的方法和装置。本发明还寻求提供一种用于处理二维光谱的方法和装置,所述方法和装置可以是完全自动化的,其准确且对噪声具有鲁棒性并且可以在宽范围的实验条件下应用。本发明有利于快速自动化阶和峰检测。
[0064]
本发明的示例性实施例可以包括以下步骤中的一些或全部步骤:
[0065]-使用如二维阵列检测器等检测器获取光谱的图像,如全帧图像;
[0066]-通过使用合适的算法,例如全变分去噪(tvd)算法,对获取的图像进行去噪,其中合适的算法会使准确度的损失最小;
[0067]-在获取的图像中选择窗口(即,子图像);
[0068]-确定所选窗口中光谱的局部极值(即最小值和/或最大值),所述局部极值指示光谱的段(即,在中阶梯光栅光谱情况下为阶);
[0069]-确定一系列相邻局部极值;
[0070]-对每个窗口应用如线性霍夫变换等变换以校正任何离群值;
[0071]-通过相应窗口中的所确定一系列相邻局部极值将多项式拟合,以便于匹配相邻窗口的一系列相邻局部极值,优选地同时对多项式之间的角度和检测器的朝向施加限制;
[0072]-基于一系列相邻局部极值和/或拟合多项式标识段;
[0073]-确定光谱段内的峰;
[0074]-存储表征峰的数据,如峰的(绝对和/或相对)位置和/或峰的强度。
[0075]
并非所有步骤都需要按以上呈现的顺序进行,并且不需要进行所有步骤。例如,将图像划分为子图像的步骤可以在去噪步骤之前进行。这提供了可以根据特定子图像的性质进行去噪的优点。为了提供另一实例,在一些实施例中,可以不使用多项式;相反,段或带的性质(如界线和/或路线)以另一种方式描述,例如通过一组界线像素。在一些实施例中,可以进行子采样从而以更高准确度确定局部极值的位置以及因此光谱的段的路线。子采样还允许以更高准确度确定峰的位置。
[0076]
在一些实施例中,以上概述的步骤可以应用于光谱的每个图像。在其它实施例中,以上步骤中的一些步骤可以应用于一个或多个样品光谱以形成模板,所述模板可以用于更高效地处理后续光谱。一些步骤,如去噪,的条件可以是确定是否需要进行去噪的步骤。一些步骤可以以不同顺序进行,例如对窗口进行去噪和选择窗口。
[0077]
本发明的方法和设备可用于波长校准、诊断、故障排除和分析测量。本发明可以用于吸收光谱和发射光谱两者。
[0078]
可以利用本发明的装置的示例性实施例在图1中展示。图1中示意性地展示的光谱装置100包括光源单元101、光学器件单元102、检测器单元103、处理单元104和输入/输出(i/o)单元105。光源单元101可以例如包括放电灯和吸收某些波长的样品,所述放电灯的所产生的光将被分析。为此,由光源单元101产生的光90被馈送到光学器件单元102,所述光学器件单元可以含有中阶梯光栅和用于产生中阶梯光栅光谱的棱镜。光源单元101可替代地或另外可以包括icp(电感耦合等离子体)炬。
[0079]
光学器件单元102可以含有另外的光学元件,如一个或多个镜和/或一个或多个透镜。从光学器件单元102射出的光91被投射到阵列检测器103上,所述光在所述阵列检测器
上被检测并被转化为表示光谱的电信号92。阵列检测器103可以包括例如cid(电荷注入装置)阵列。电信号92被馈送到处理单元104,所述处理单元可以含有微处理器和相关联的存储器。存储器可以存储指令,所述指令允许处理器执行根据本发明的方法步骤。处理单元104使用电信号92来产生与中阶梯光栅光谱相关的信息,例如与中阶梯光栅光谱中的峰的位置和/或强度相关的信息。此信息可以通过i/o单元显示和/或打印,所述i/o单元还可以将此信息转发给其它装置。
[0080]
图2示意性地展示了示例性中阶梯光栅光谱。中阶梯光栅光谱1被示出为包括阶2。阶2在图2中基本上平行且大致水平延伸。阶2可以是弯曲的,使得阶与x轴线之间的角度可以根据x位置而变化。阶2还被显示为含有峰5,在图2中以实例的方式示出了所述峰的仅一小部分。阶2在图2中由其中心线或脊表示,但实际上阶具有某种宽度并且可以被视为二维光谱1的段。区域8和9的信息密度较低,因为在这些区域中阶和其相应峰的强度非常低。最高强度主要出现在中阶梯光栅图1的顶部附近。
[0081]
可以表征为阶的(局部)最大值的峰5表示光源。即,存在于光源中的化学元素使中阶梯光栅光谱中出现特定峰,由此允许基于光谱标识化学元素。
[0082]
图3中更详细地示出了阶的实例,所述阶可以为图2的中梯形光谱1沿线q-q的横截面的一部分,因此是阶2沿用其检测光谱的阵列检测器的列的横截面。应当理解,在图3中,阶垂直于图(相较于图2)的平面延伸。
[0083]
阶2a被示出为具有最高强度或幅度a,这是图2的实例中的最高阶。可以看出,阶的幅度a逐渐减小,阶2a的幅度大于阶2b,阶2b的幅度大于阶2c等。虽然这是典型的,但后续的阶的幅度更小的这种情况不一定总是如此。
[0084]
第一阶2a在图3中被示出为具有最大值3a并由局部最小值4a和4b界定。类似地,第二阶2b被示出为具有(局部)最大值3b并且由局部最小值4b和4c界定。因此,每个阶可以被视为构成具有被局部最小值(如4b和4c)限定的宽度的光谱(图2中的1)的一个带或段。光谱在局部最小值4a、4b等处的幅度a可以大于零或等于零。
[0085]
在图3中可以看出,阶可以通过检测两个后续的局部最小值,例如4b和4c,或检测局部最大值,如3b,或两者来标识。局部最小值和最大值在此处为在y方向,即在竖直方向上观察到光谱时的局部极值。如果图2的光谱被例如二维检测器阵列捕获,则图2中的线q-q可以被视为表示像素的列。因此,在本实例中,图3的局部极值为每个阵列列的局部极值。应当理解,可替代地或另外,可以确定每个阵列行的局部极值。然而,由于在图2的实例中阶2处于的基本上水平的朝向,所以确定每个阵列列的局部极值可能更高效。
[0086]
在实践中,阶通常不容易区分,因为典型中阶梯光栅光谱将含有噪声。此噪声可以通过光源、通过光学器件和/或通过阵列检测器引入。图4提供了示出大量阶的中阶梯光栅光谱的实际横截面的实例。如可以看到的,噪声使得难以区分阶,特别是具有较低幅度并因此具有较低信噪比的那些阶。噪声使得检测阶的峰和确定其位置变得特别困难。
[0087]
为了降低噪声的影响,本发明使用去噪,优选地全变分去噪(tvd)。与会导致图像细节丢失的平滑化相反,去噪试图在降低噪声的同时保留图像细节。tvd技术在例如以上提到的rudin、osher和fatemi的论文中描述。
[0088]
去噪可以应用于整个图像或仅应用于选定的子图像或窗口。也就是说,在光谱的图像内,可以限定子图像,每个子图像具有比完整图像显著更少的像素。完整图像可以例如
被分成4个(或更少)到16个(或更多,如32个)子图像,这些子图像一起构成完整图像。可替代地,可以从完整图像中选择介于4个(或更少)到16个(或更多)之间的子图像,所述子图像一起含有比完整图像更少的像素。因此,可以将不太关注的图像区域排除在处理之外。在一些实施例中,子图像可以一起覆盖的区域小于整个光谱图像1覆盖的区域,例如小于90%、小于50%或小于25%。
[0089]
图5示意性地展示了使用子图像或窗口的实例。图像1被示出为包括四个子图像或窗口10a、10b、10c和10d,所述四个子图像或窗口一起覆盖整个光谱1的仅一部分。每个子图像或窗口都含有部分光谱。
[0090]
在所示实例中,窗口10a与10b之间存在重叠区域,而窗口10c与其它窗口之间不存在重叠。窗口10a、10b和10c可以基于先验知识选择,并且可以例如以其含有某些预期峰的方式来选择。窗口10d以覆盖光谱的具有较低信息密度的一部分的方式选择,所述一部分在这种情况下为较低信息密度区域9。这样的窗口可以不用于标识峰,因为区域9中可能不存在可标识的峰,而是用于确定背景噪声。窗口10d因此可以用于暗帧补偿。
[0091]
如图5中可以看到的,窗口10a部分地覆盖具有较低信息密度的区域8。在此较低信息密度区域8中,与区域9一样,难以正确地确定光谱的段的特性。根据本发明的另外的方面,子图像10a的覆盖区域8的部分11可以不用于确定光谱的特性。相反,可以使用窗口10a的其余部分,并且可以将结果外推到部分11。也就是说,窗口的覆盖低信息密度区域(在本例中为8)的部分11中的光谱特性可以通过从窗口的其余部分外推获得。以此方式,光谱的区域8和9仍可以至少部分地使用。一系列局部极值或连接局部极值的线的外推可以使用已知方法进行。
[0092]
如以上所提到的,可以按窗口(子图像)进行去噪。这允许去噪适于特定窗口的性质。另外,如果窗口一起覆盖的区域小于整个光谱覆盖的区域,则可以减少所需的去噪处理的总量。
[0093]
一旦对光谱进行去噪,就可以确定其特性。为此,本发明的方法确定光谱的局部最大值和/或最小值。再次参考图3,所述方法可以确定最小值4a、4b、4c等在此实例中在像素的列上的位置。因此,所述方法可以确定图像的段之间的边界(在中阶梯光栅光谱的情况下,段为阶)。每对边界限定其之间的段。可替代地或另外,可以确定局部最大值3a、3b等,由此产生脊或段的近似中线。可以使用一对边界或一个脊来限定光谱的段(图2中的2)。在一些实施例中,可以使用一对边界和一个脊两者。
[0094]
当确定局部最小值和/或最大值以找到段的边界和/或脊时,所得到的一组极值将不会形成平滑的线。检测到的极值的位置可能会受到残余噪声和像素的间隔的影响。注意,此处使用“线”一词来表示由检测到的局部极值构成的串,所述局部极值表示段界线和/或检测到的段脊。
[0095]
为了减少任何噪声的影响并使界线和/或脊平滑化,本发明提出使用变换并使通过在变换空间中检测极值的位置发现的一系列极值(其有效地构成线)平滑化。本发明优选地使用基于极坐标的变换。优选的变换为霍夫变换,但是也可以使用其它变换。
[0096]
霍夫变换描述于上面提到的原始霍夫专利us 3,069,654,以及例如r.o.duda和p.e.hart,“使用霍夫变换来检测图片中的线和曲线(use of the hough transformation to detect lines and curves in pictures)”,《美国计算机学会通讯(comm.acm)》,第15
卷,第11-15页(1972年1月)中。
[0097]
应用变换可以包括去除变换域中的离群值。离群值可能是由于噪声和/或测量误差引起的。通过去除离群值,可以改进限定段的线。已经发现在变换域中去除离群值比在原始域中更有效。具体地,霍夫变换将平面中的点描述为距离与角度的组合,所述距离为离原点的距离,并且所述角度为所述特定点处的阶的倾斜度。已经发现离群值通常具有不正确的角度。本发明的方法可以通过例如用平均角度替换检测到的不正确角度来去除这样的离群值或校正角度。除了校正或去除离群值之外,还可以使角度平滑化。在校正离群值和/或使角度平滑化之后,可以进行逆变换以将数据点带回到原始域。
[0098]
在应用变换之前,可以进行边缘检测以更好地标识图像段的边缘。边缘检测可以使用常规技术进行,如j.canny,“用于边缘检测的计算方法(a computational approach to edge detection)”,《ieee模式分析与机器智能汇刊》8(6):679
–
698,1986中描述的canny边缘检测算法。可以替代使用其它边缘检测算法。
[0099]
如以上提到的,可以按子图像或窗口处理图像。也就是说,也可以按子图像进行变换和/或边缘检测。在逆变换和任何边缘检测之后,可以将窗口拼接在一起以构成合成图像。应该确保检测到的段是连续的并且具有平滑的边界的缝合在一起可以使用已知技术进行。图像拼接技术的实例公开于steve mann,“合成同一场景的多个图片(compositing multiple pictures of the same scene)”,《第46届年度成像科学与技术会议论文集(proceedings of the 46th annual imaging science&technology conference)》5月9-14日,马萨诸塞州剑桥(cambridge,massachusetts),1993中。再次,缝合应确保表示段的边界或脊的线不间断且平滑,不具有拐角。
[0100]
由拼接或从逆变换和/或边缘检测产生的光谱图像具有表示光谱的段的边界和/或脊的相关联的线。这些线可以拟合在(原始或去噪的)光谱上。随后,可以检测峰并将其与阶相关联。可以使用任何合适的算法来检测光谱的峰,例如检测沿段的局部最大值。可以应用阈值来限制检测到的峰的数量并消除较小的峰。
[0101]
在每个检测到的超过阈值(如果有的话)的峰中,可以记录以下数据:
[0102]-检测到峰的阶;
[0103]-阶内的峰的相对位置;以及
[0104]-峰的强度(高度和/或宽度)。
[0105]
因此,本发明可以用于检测段(或在中阶梯光栅光谱的情况下为阶),并因此确定峰相对于其相应段的位置。
[0106]
可以单独确定每个光谱图像的表示光谱的段的边界和/或脊的线。然而,在一些实施例中,由此获得的一组线可以用于若干光谱,例如用于许多随后的相似光谱。这节省了单独确定表示每个光谱的边界和脊的线的计算工作。因此,确定的一个光谱的线可以用作一系列光谱的模板。
[0107]
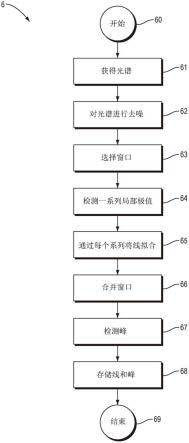
图6示意性地表示了根据本发明的方法的第一实施例。图6中展示的方法6开始于60。在步骤61中,获得二维光谱,例如通过使用二维阵列检测器捕获光谱,或通过从存储器中检索先前捕获的光谱。
[0108]
在步骤62中,对光谱进行去噪,优选地使用全变分去噪。步骤62的结果为去噪的二维光谱。在此实施例中,使用部分光谱或窗口以仅处理光谱中的所关注部分。为此,在步骤
63中选择一个或多个窗口。在每个窗口内,在步骤64中检测一系列相邻局部极值。在步骤65中,通过每个系列的相邻局部极值,例如通过使用多项式将线拟合。将线拟合的步骤可以进一步包括使用特征检测,例如通过使用霍夫变换。
[0109]
步骤65可以含有以下子步骤:
[0110]-对极值的串进行变换;
[0111]-校正任何离群值以产生经校正的串;以及
[0112]-对极值的串进行逆变换。
[0113]
在步骤66中,在需要时,即在窗口共用一个界线或重叠的情况下合并窗口。合并窗口可以涉及将窗口的线拟合在一起并且在线的角度和/或曲率不对应时任选地调整这些线。调整可以涉及在其接合处的最大角度和/或最大曲率的约束下将新线拟合,所述新线最接近来自两个窗口的两条对应的线。平滑算法可以应用,是这种情况。
[0114]
可以使用线以描绘光谱的段并在步骤67中检测每个段内的峰。在步骤68中可以将每个峰的峰数据,如每个相对位置和/或强度,与描述所拟合的(并且在适当的情况下,所调整的)线的数据存储在一起。所述方法结束于步骤69。应当理解,此实施例仅是示例性的并且可以在本发明的范围内进行许多修改和添加。
[0115]
图7中示意性地示出了根据本发明的方法的第二实施例。图7的方法7与图6的方法6基本相似,但一些步骤以不同的顺序进行。方法7开始于70,然后如图6中的步骤61,在步骤71获得光谱。与方法6相比,方法7首先在步骤72中选择窗口,然后在步骤73中通过对所选窗口的部分光谱进行去噪来对光谱进行去噪。通过仅对部分光谱进行去噪,通常将对更少的光谱图像数据进行处理,由此节省资源。应当注意在至少一些部分光谱中,如果噪声水平足够低就可以不进行去噪,因此也节省了资源。
[0116]
所述方法继续进行步骤74和步骤75,在所述步骤74中检测部分光谱(窗口)中的一系列局部极值,在步骤75中通过一系列局部极值将中一条或多条线拟合。如果窗口足够小,则可以通过所述系列中的至少一些系列将单条直线拟合。也就是说,在一些窗口中,可以通过单条直线将一系列局部极值中的多个极值之一近似,所述系列通常是弯曲的。
[0117]
与图6的方法6相比,在方法7中,在窗口合并之前检测峰。在步骤76中检测峰,例如通过找到在步骤75中确定的直线中的每条直线上的局部强度最大值。在方法7中,这可以按窗口进行。然后,在步骤77,可以合并窗口。在一些实施例中,这可以包括通过将窗口“拼接在一起”来由窗口产生合成图像,但是在其它实施例中不产生实际合成图像,但是可以将峰相对于窗口的位置转化为相对于整个图像的位置。可以在步骤78中存储所拟合的线和/或峰,之后所述方法借助于79。
[0118]
可以应用方法6和7来单独或按顺序处理光谱图像。在按顺序处理的情况下,所述方法可能不会在步骤68或78之后结束,而是可以返回到步骤61或71。所述方法还可以用于确定模板以供之后与光谱图像匹配。
[0119]
方法7的步骤73和74的实施例在图8和9中更详细地示出(应当注意,这些实施例也可以应用于图6的对应步骤62和64)。图8的步骤73开始于在子步骤731中确定是否需要去噪。这可以基于先验知识或基于测试或两者完成。可以预先了解到,特定光谱图像或窗口含有很少噪声,或者特定窗口不含有相关的峰。当首先制作模板并且对另外的光谱图像的处理主要由将模板拟合到图像组成时,情况可能尤其如此。在那种情况下,段的位置(例如,中
阶梯光栅光谱中的阶)是已知的,并且可以仅确定峰的位置,这在存在噪声的情况下可能是可行的。当基于测试确定是否需要去噪时,可以使用任何合适的方法来确定噪声水平。合适方法的实例为对图像信号进行傅里叶变换(fourier transforming)以及评估所产生的光谱在高频率下,例如在采样频率的一半左右的频率下,的方差。
[0120]
可以将确定的噪声水平与一个或两个阈值进行比较。如果噪声水平太高,例如高于snr(信噪比)=1的阈值,则去噪几乎没有用(在一些实施例中,所述方法然后可以结束或返回到步骤61或71)。如果噪声水平太低,例如低于snr=1000或snr=500的阈值,则不需要去噪。
[0121]
如果子步骤731的结果是需要去噪,则方法继续到子步骤732,否则方法继续到步骤74。在子步骤732中,确定噪声的标准偏差σ是否已知。噪声性质可以是先验已知的或者可以在子步骤735中使用合适的方法,例如以上提到的傅里叶变换方法确定。然后,在子步骤734中,使用合适的去噪方法,如tvd(全变分去噪),例如使用rudin-osher-fatemi模型对光谱图像或光谱图像的一部分(窗口)去噪。根据本发明,优选地避免进行通过求平均的平滑化。在子步骤734中,可以使用噪声参数σ和在子步骤735中确定的或先验已知的任何其它噪声参数。在子步骤734之后,方法进行到步骤74。
[0122]
图9中更详细地示出了步骤74的一实施例。在此实施例中,步骤74开始于子步骤741,在所述子步骤中在光谱图像或正在处理的特定窗口中标识最小值(通常:极值)。如众所周知的,最小值可以通过将像素值(即,图像强度值)与一组相邻像素进行比较来标识。在子步骤742中,确定是否需要标识阶(或更通常,图像段)。由于在一些应用中使用了先前准备的模板,因此已经标识了阶和其预期位置。在那种情况下,方法继续到子步骤743,在所述子步骤中通过旋转、缩放、投影和/或其它图像处理操作将窗口或整个图像拟合到模板上。当子步骤743完成时,方法继续到步骤75。
[0123]
如果子步骤742的结果是需要确定阶(或段),则在子步骤744中使用变换,如霍夫变换,以更好地标识阶界线(段界线)。由于在步骤745中霍夫表示可能有噪声,因此在子步骤745中对变换表示进行平滑化或去噪。例如,可以去除离群值和/或可以应用去噪算法。在这种特定情况下,也可以应用求平均的一种形式。然后,在子步骤746中,将平滑函数拟合到最小值的平滑表示上。平滑函数可以包括直线或直线段,和/或抛物线和/或其它平滑的线。因此,经变换的最小值可以有效地被所拟合的平滑函数的值替代。然后,在子步骤747中,应用逆变换,之后方法继续到步骤75。
[0124]
上面已经在不使用数学的情况下描述了本发明。本发明的一些方面可以用数学术语有效地描述,如以下所解释的。
[0125]
噪声去除:概述
[0126]
可以通过某种分析物产生二维光谱,所述二维光谱的性质有待确定。可以使用以下模型:
[0127]
s=u w,
ꢀꢀꢀ
(1)
[0128]
其中s为观察到的实验测量结果,并且u为通过分析物产生的信号,所述信号被噪声w破坏。在此,信号u被假设为稀疏的(或至少在某种基础上为其表示),而噪声w总是被假设为密集的。去噪的问题变为由观察到的密集信号s恢复稀疏信号u(或在某种基础上其表示),这可以表述为
[0129][0130]
其中h和a为反应s和u的一些性质(例如,各向异性、纹理等)的矩阵,‖h(s-au)‖2为l2范数(欧几里得范数),为正则化参数fi(u)为u的线性变换,而σi在此处表述所有i的总和。应当注意,在等式2中阐述的问题中,u不一定必须为稀疏的,条件是fi(u)为稀疏的(见下文)。等式2中的第一项在l2范数的意义上将观察到的s与寻找的信号au之间的差异最小化,而第二项为在l
p
范数的意义上确保fi(u)'和u的稀疏性的一组限制。尽管在大多数情况下,等式2中阐述的问题没有解析解,但存在大量快速且高效的迭代方法来解决所述问题,这些方法在本领域是众所周知的:
[0131]
●
l.condat,“1d全变分去噪的直接算法(a direct algorithm for 1-d total variation denoising)”,《ieee信号处理快报(ieee signal processing letters)》,20(11):1054
–
1057,2013年11月。
[0132]
●
m.figueiredo、j.bioucas-dias和r.nowak,“基于小波的图像恢复的优化最小化算法(majorization-minimization algorithms for wavelet-based image restoration)”,《ieee图像处理汇刊(ieee trans.image process.)》,16(12):2980
–
2991,2007年12月。
[0133]
●
m.v.afonso、j.m.bioucas-dias和m.a.t.figueiredo,“用变量分裂和约束优化进行快速图像恢复(fast image recovery using variable splitting and constrained optimization)”,《ieee图像处理汇刊》19(9):2345-2356,2010年9月。
[0134]
●
t.goldstein和s.osher,“l1正则化问题的分裂布雷格曼方法(the split bregman method for l1-regularized problems)”,《siam成像科学杂志(siam j.imag.sci.)》,2(2):323
–
343,2009。
[0135]
●
c.wu和x.tai,“用于rof、矢量tv和高阶模型的增强拉格朗日方法、对偶方法和分裂布雷格曼迭代(augmented lagrangian method,dual methods,and split bregman iteration for rof,vectorial tv,and high order models)”,《siam成像科学杂志》,3(3):300-339,2010。
[0136]
由于由超出通过噪声w施加的不确定性的观察结果s恢复信号u不可行(等式1),因此正则化参数λi的值(等式2)应反映特定于实验技术的噪声w的性质。
[0137]
中阶梯光栅光谱中的阶的3d表示具有水平准平行脊的形式,所述水平准平行脊具有分隔其的凹槽样边界。然后可以将标识每个单独阶的问题重塑为检测脊或凹槽(或两者的组合)的问题。后者可以在两个步骤中解决:首先通过检测局部最小值(或最大值)的连续延伸,然后通过借助于找到的段将平滑的线拟合。
[0138]
在极值检测中采用边缘检测的方法可能是有益的。许多此类方法是本领域众所周知的且在此处不进一步讨论。
[0139]
由于中阶梯光栅光谱中的阶可很好地表征,因此在涉及通过检测到的极值将平滑的线拟合的步骤中,使用如霍夫变换等特征提取方法是有益的。此方法的特定优点是将任何信号分解为具有解析表达,例如,直线、多项式等的一组特征。
[0140]
一旦将二维光谱分割成多个段或带,就可以通过任何峰检测的方法来完成峰表征。
[0141]
噪声去除:对实际实施方案的考虑
[0142]
a.算子“h”和“a”的选择
[0143]
矩阵a的选择主要取决于所分析的数据的特定性质和所期望的处理结果。因此,出于从斑点噪声中提取信号的目的,使用a=i可能是有益的,其中i为恒等算子。等式2的第一项中的线性变换还可以以使得过滤掉特定于实验技术的s的一些不期望的但特性特征的方式来使用。具体地,中阶梯光栅图已知具有斑点状基线,其频域特征与由单独的阶和线产生的那些特征显著不同。因此,可能是有益的是选择起到高通滤波器作用的矩阵h,从而使s的所有低频分量(表示基线)在最小化程序的上下文中不相关,这有效地从u中去除了基线。此类滤波器的构建方法的详细说明可以在其它地方找到(例如,i.w.selesnick、h.l.graber、d.s.pfeil和r.l.barbour,“同时低通滤波和全变分去噪(simultaneous low-pass filtering and total variation denoising)”,《ieee图像处理汇刊》,第62卷,第1109-1124页,2014)。以其它方式,可以设置h=i,其将基线减法从u委托给中阶梯光栅图处理的以下步骤。
[0144]
可替代地,可以使用线性变换来增强u中的原始信号s的信息性特征。例如,考虑到中阶梯光栅光谱中的阶的准平行性质,用在去噪程序期间起到各向异性卷积算子作用的a来强调其方向特征可能是有益的。这种算子的构造和应用的方法是本领域众所周知的(p.perona和j.malik.“使用各向异性扩散的尺度空间和边缘检测”《模式分析与机器智能汇刊》第12卷,第7期,1990年7月,第629
–
639页)。
[0145]
b.稀疏表示fi(u)'的选择
[0146]
对于等式2的解,存在并且实际上可实现的u本身不一定必须为系数的,找到其线性变换fi(u)的非空集就足够了,其中每个单独的fi(u)是稀疏的。任何中阶梯光栅光谱本质上都含有有限数量的阶和线(即,有限数量的极值),并且即使没有事先去除基线(见上文),也可以假设其为分段平坦的。根据设计,中阶梯光栅最常用于阶20到200之间。保证u的前k个(偏)导数是稀疏的。因此,有益的是使用
[0147]fi
(u)=diu,
ꢀꢀꢀ
(3)
[0148]
其中di为第i阶倒数算子。将等式3并入到等式2产生了
[0149][0150]
中阶梯光栅光谱中的阶在xy平面中具有特定朝向;因此,分别加权和估计两个方向的稀疏度可能是有益的。这可以通过将最小化问题来实现(等式4)重述为
[0151][0152]
其中和为部分第i阶倒数算子,其中其相应的正则化参数和在x方向和y方向上分裂。应当注意中阶梯光栅光谱中的阶的倾斜度可以是先验已知的。可以通过使用交叉色散元件,即光栅或棱镜的色散来计算中阶梯光栅阶的倾斜度。可能有益的是相应地缩放和例如
[0153]
以及
ꢀꢀꢀ
(6.a)
[0154]
[0155]
其中为阶的倾斜度,并且f
x
和fy为尺度函数。
[0156]
c.因此正则化参数λi'的值
[0157]
信号u可以由具有通过噪声施加的不确定性的观察结果s重建,因此λ始终是噪声w的函数。因此,可能有利的是使用λ=ασw,其中σw为w的标准偏差,并且α为决定假阳性与假阴性之间权衡的尺度参数。由于中阶梯光栅光谱的信息性内容以及噪声特性在空间上和方向上不均匀,因此可能有益的是α的值取决于位置(和梯度)。
[0158]
d.表征噪声“w”.
[0159]
中阶梯光栅光谱的一个特性特征为其频率表示的偏态功率分布。大多数信号集中在低频率范围(即《《1/2奈奎斯特频率(v))。相反,噪声总是密集的,无论在频域还是时域都是如此。因此,可能有利的是对可观察到的信号进行傅里叶变换,之后评估所述信号在高频率范围内的方差以得到σw的估计值。如果检测器的频率响应已知,则可以使用所述信息来增强估计的保真度。考虑到中阶梯光栅光谱的内在方向性,可能有利的是独立地在x和y方向上执行所述程序。
[0160]
鉴于中阶梯光栅光谱的空间非均匀性,可能有利的是以窗口方法执行上述程序(或其任何组合),或者覆盖整个光谱(例如,中阶梯光栅图),或者仅覆盖选定的所关注区域。
[0161]
将中阶梯光栅图分割为单个阶:对实际实施方案的考虑
[0162]
中阶梯光栅光谱中的阶具有内在倾斜度和曲率,并且可以很好地通过阶≥1的多项式来近似。由于其近似范围可以是先验已知的,因此可以通过减少反映这些值的多项式系数的搜索空间来实现速度和保真度的显著增益。
[0163]
由于所有中阶梯光栅图参数(例如噪声特性、方向性等)在空间上不均匀,因此如果在选定的所关注窗口(即子阵列)上执行处理,则可以实现保真度的显著增益,其中这些参数可以以更高的精度本地评估。此外,由于可以在不损失精度的情况下通过较低次多项式来近似中阶梯光栅图阶,因此在处理速度方面也可以实现显著增益。
[0164]
如果所关注窗口足够大,则可能有益的是将其进一步细分为多个(可能重叠的)子窗口(也可以被称为子子阵列)。因此,可以通过本领域已知的任何曲线拟合方法从在多个子窗口中找到的那些窗口重建原始窗口中的阶。请注意,这种方法可以整体扩展到对中阶梯光栅图的处理。
[0165]
窗口的大小、位置和多重性主要由噪声的均匀性/空间特性和可用的计算资源驱动,然而存在可以考虑的几个实际考虑。窗口优选地应覆盖y方向上的至少一个阶;x方向上的绝对最小值由中阶梯光栅光谱阶的近似中使用的多项式的阶施加;在使用任何各向异性滤波的情况下(见上文),最小可用窗口大小由所使用的各向异性算子的性质决定;也可以应用最小窗口大小的其它标准。
[0166]
由于纹理上下文中的中阶梯光栅光谱中最具信息性的部分位于其中心区域,其中任一侧的信噪比(snr)显著降低,因此可能有益的是选择这样的位置和窗口大小来确保与所述高snr段的至少部分重叠。
[0167]
实施方案方面
[0168]
2d光谱构建的初始步骤可以涉及去噪步骤,如“去噪”文本部分中所述。选择参数λ(等式2)在此步骤中很重要。所述参数的选择受噪声水平的影响,所述噪声水平进而可以从
观察到的噪声的值σ中获得。存在多种本领域的技术人员可以确定σ的值的方式(有关更多详情,请参见“噪声去除”文本部分的小节“c”和“d”);一种方式是将图像分割为一组竖直(即垂直于阶)的分段,并在已知不具有任何光谱线的段中寻找信号的方差。一旦获得噪声的值σ,就可以执行去噪程序(等式2或者等同地等式4)。适当算子的选择在“噪声去除”文本部分的小节“a”和“b”中描述。展示的是使用去噪与选择的h=i和a=i以及i=1(等式4)对1d分段和2d分段的影响。
[0169]
本领域的技术人员将理解,本发明不限于上文所描述的实施例,并且在不脱离所附权利要求中所限定的本发明的范围的情况下,可以进行许多修改添加。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。
