1.本实用新型属于流道清理技术领域,涉及一种基于磁导向气动往复射流的复杂零件内流道清理装置,用于各种复杂零部件内部流道的清洗、剥离、清粉、表面精整和去毛刺。
背景技术:
2.目前,国际国内的航空航天发动机的领域,正在开发一种全新的智能3d仿生换热器,其生产制造工艺包括3d打印增材制造技术,组合焊接技术等,制造出来的零件内部复杂流道内会产生粘粉、毛刺等污垢,严重影响零件的质量和可靠性,必须将其彻底清理干净才能有效使用。针对这种复杂内流道表面精整,目前的清理和去毛刺设备及技术市场还没有发现一种能有效清粉和去毛刺的技术手段和设备。
3.金属3d打印是目前快速发展的一项增材制造新技术之一,打印成型过程中,高能束短暂而快速的加热,且金属粉末熔融后又快速的冷却,使得金属3d打印件容易出现表面质量问题,如粘粉、毛刺等。工件表面粗糙度通常在ra6-32μm左右,往往达不到工件实际应用的需求,尤其对于一些结构复杂且具有微小腔体结构的换热器3d打印零部件,其孔隙内的粉尘和毛刺更是难以去除,较大的粗糙度将增加换热器流阻,同时还存在以下风险,如果后处理清粉不彻底,在工作时当一定压力的流体经过粗糙的内流道可能带走部分熔覆粘着较差的金属粉末,从而污染工作介质系统。
4.现有内流道抛光技术有磨料流抛光和电化学抛光,对于内流道结构,磨料流抛光技术主要是通过改变磨粒大小或给磨料增压的方法来对零件进行抛光、清粉,但仍然存在局限性,现有内流道抛光技术如磨粒流内流道抛光机只是针对结构简单的内流道;由于传统的抛光技术如磨粒流内孔抛光技术,通过改变其磨料大小对具有复杂且微小的内流道进行抛光,但无法控制磨料在流道内的轨迹,所以很难对抛光死角、盲孔等进行处理,很容易造成进出口位置抛光过度,而抛光死角没有抛光彻底的情况。而电化学抛光在处理结构复杂且精密的零件时,容易对零件的薄弱区造成损害,影响零件性能。所以,对于具有复杂腔体结构或存在微小孔隙和盲孔的零件,现有抛光技术普遍存在抛光不彻底、过度抛光等问题。
技术实现要素:
5.为了解决上述问题,本实用新型提供一种基于磁导向气动往复射流的复杂零件内流道清理装置,磁性悬浮磨料流体在磁导向的引导下,能够有效清理死角,结合气动往复射流,有效清理复杂内流道或微小腔体盲孔结构,避免了过度抛光,提高了工件质量和可靠性,解决了现有技术中存在的问题。
6.本实用新型所采用的技术方案是,一种基于磁导向气动往复射流的复杂零件内流道清理装置,包括
7.磁力驱动装置,所述磁力驱动装置包括永磁体转盘,永磁体转盘的中心与旋转电机的输出轴连接;所述旋转电机安装在横向滑块上,横向滑块滑动安装在水平设置的横向
导轨上,横向导轨的形状为u型,横向导轨通过纵向滑块滑动安装于竖直的纵向导轨上,使得永磁体转盘与旋转电机一起上下、前后、左右滑动;
8.抛光件装夹器,所述抛光件装夹器用于装夹待清洗工件,并调节待清洗工件的空间角度和位置,使得抛光死角正对永磁体转盘;
9.往复清洗系统,所述往复清洗系统用于正反往复地为待清洗工件的内部流道输入高压喷射磁性悬浮磨料。
10.进一步的,所述抛光件装夹器包括
11.双向伸缩固定爪,所述双向伸缩固定爪通过双向伸缩装置控制两个爪部相互靠近或相互远离,以适应不同尺寸的待清洗工件;
12.直线滑动装置,所述直线滑动装置包括
13.导轨,所述导轨水平安装于c型框架的上、下底板内侧壁,分别位于双向伸缩固定爪的上部和下部;
14.丝杠,所述丝杠与导轨平行设置,步进电机输出轴连接丝杠,丝杠上螺纹连接有滑块,滑块与导轨滑动连接,当步进电机启动时,丝杠转动并带动滑块沿着导轨滑动;
15.万向连接轴,所述万向连接轴一端固定在滑块上,另一端固定在双向伸缩固定爪上。
16.进一步的,所述双向伸缩固定爪靠近待清洗工件的一侧安装有振动电机。
17.进一步的,所述往复清洗系统包括
18.第一输送管,所述第一输送管的一端连接待清洗工件的第一流口,第一输送管的另一端通过三通管分为两路,其中一路通过正向清洗回路阀组连接气动增压水泵的出液口,第一输送管的另一路通过反向回收阀组连接液体回收装置;
19.第二输送管,所述第二输送管的一端连接待清洗工件的第二流口,第二输送管的另一端通过三通管分为两路,其中一路通过反向清洗回路阀组连接气动增压水泵的出液口,第二输送管的另一路通过正向回收阀组连接液体回收装置;
20.气动增压水泵的进液管连接复合磨料搅拌桶。
21.进一步的,还包括可拆卸抛光容器,待清洗工件固定于可拆卸抛光容器内,可拆卸抛光容器的内壁设有加热装置,可拆卸抛光容器的外壁设有保温层,可拆卸抛光容器上设有连接第一流口、第二流口的连接口。
22.进一步的,所述复合磨料搅拌桶上设有加热装置。
23.进一步的,所述复合磨料搅拌桶的桶壁里层设有加热带,外层为保温层,桶口通过软管连接气动增压水泵的进液管,软管上安装有电磁阀。
24.进一步的,所述永磁体转盘上固定有条状的永磁体。
25.进一步的,所述磁性悬浮磨料包括直径0.3-1mm的钢丸。
26.进一步的,所述气动增压水泵的压力范围1-5mpa。
27.本实用新型的有益效果是:
28.本实用新型通过抛光件装夹器和永磁体转盘的配合,对盲孔和复杂弯道具有定向清洗和抛光作用,能够有效清理微细复杂内流道死角。通过往复清洗系统正反往复地为待清洗工件的内部流道输入高压喷射磁性悬浮磨料,提高了对复杂弯道、盲孔的摩擦冲刷效果,实现了均匀清粉和抛光,同时避免了过度抛光,提高了工件质量和可靠性。
附图说明
29.为了更清楚地说明本实用新型实施例或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本实用新型的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
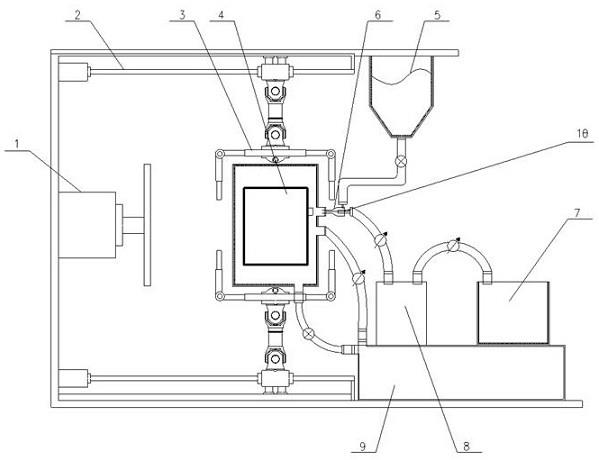
30.图1是本实用新型实施例的总体结构示意图。
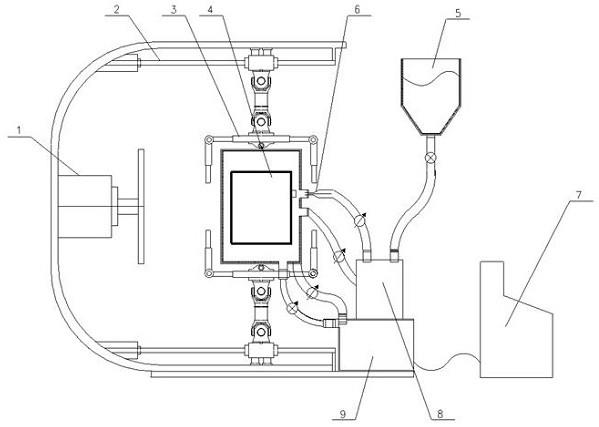
31.图2是本实用新型实施例的详细原理及结构示意图。
32.图3a是本实用新型实施例中气动往复磨料清洗示意图。
33.图3b是本实用新型实施例中气动往复磨料清洗的流路示意图。
34.图4是本实用新型实施例中磁力驱动装置结构示意图。
35.图5是本实用新型实施例中磁力引导流程示意图。
36.图中,1.磁力驱动装置、11.旋转电机、12.永磁体转盘、13.纵向导轨、14.纵向滑块、15.横向导轨、16.横向滑块、17.永磁体、2.滑动装置、21.步进电机、22.丝杠、23.导轨、24.滑块、3.抛光件装夹器、31.万向连接轴、32.双向伸缩固定爪、33.振动电机、4.待清洗工件、41.第一流口、42.第二流口、5.复合磨料搅拌桶、51.加热带、52.电磁阀、53.软管、6.往复清洗系统、61.正向回收阀组、62.反向回收阀组、63.正向清洗回路阀组、64.反向清洗回路阀组、7.电气控制系统、8.气动增压装置、81.进液管、82.出液管、83.气动增压水泵、9.液体回收装置。
具体实施方式
37.下面将结合本实用新型实施例,对本实用新型实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本实用新型一部分实施例,而不是全部的实施例。基于本实用新型中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本实用新型保护的范围。
38.实施例1,
39.一种基于磁导向气动往复射流的复杂零件内流道清理装置,如图1所示,包括磁力驱动装置1、滑动装置2、抛光件装夹器3、待清洗工件4、复合磨料搅拌桶5、往复清洗系统6、电气控制系统7、气动增压装置8、液体回收装置9。
40.抛光件装夹器3用于夹持待清洗工件4;
41.混合磨料抛光液经过气动增压装置8加压后输送到待清洗工件4的复杂内流道中,采用气动往复射流对复杂内流道进行往复磨料射流清洗抛光,同时混合磨料抛光液在磁力驱动装置1的磁力导向引导下,沿着复杂内流道流动,对抛光死点进行有效抛光清洗。
42.如图2所示,滑动装置2包括c型的框架,框架的上、下底板固定有水平的导轨23,丝杠22与导轨23平行设置,步进电机21输出轴连接丝杠22,丝杠22上螺纹连接有滑块24,滑块24与导轨23滑动连接,当步进电机21启动时,丝杠22转动并带动滑块24沿着导轨23滑动。
43.如图4所示,框架的侧壁安装有磁力驱动装置1,磁力驱动装置1包括旋转电机11、永磁体转盘12;旋转电机11安装座上设有竖直的纵向导轨13,水平的横向导轨15通过纵向滑块14滑动安装于纵向导轨13上,可上下滑动;横向滑块16滑动安装在横向导轨15上,横向导轨15的形状为u型,横向滑块16可以在横向导轨15上来回横向滑动;
44.旋转电机11安装在横向滑块16上,旋转电机11的输出轴与永磁体转盘12连接,使得永磁体转盘12能够上下、左右、前后滑动,从而实现3d范围内运动。
45.永磁体转盘12上固定有条状的永磁体17,永磁体17 引导抛光液体中的钢丸定向冲击内流道表面,抛光液通过气动增压装置8加压,高速射入待清洗工件4,往复清洗带抛光工件,达到抛光清粉的效果。
46.抛光件装夹器3由万向连接轴31、双向伸缩固定爪32、振动电机33组成;
47.万向连接轴31一端固定在滑块24上,另一端固定在双向伸缩固定爪32上,双向伸缩固定爪32内侧安装振动电机33。
48.双向伸缩固定爪32用于固定待清洗工件4,双向伸缩固定爪32通过上下左右四个方向的万向连接轴31与对应的滑块24连接,协同调整3d打印复杂零件(待清洗工件4)的角度位置;通过万向连接轴31、导轨23、丝杠22,调节待清洗工件4的角度位置,便于将抛光死角调整到与永磁体17平行面。双向伸缩固定爪32为双向可缩装置,双向可缩装置采用电动或气动方式,可以根据零件大小来进行调节,适用更多零件以适用于 3d仿生换热器内表面精整领域。
49.双向伸缩固定爪32靠近待清洗工件4的一侧安装有振动电机33,提高清洗效率,在清洗过程中,悬浮磨料流体冲击待清洗表面,同时通过振动电机带动工件有规律的振动,加快杂物的冲击脱落,从而有助于提高清洗效率。
50.如图3a-3b所示,往复清洗系统6包括第一输送管、第二输送管;第一输送管的一端连接待清洗工件4的第一流口41,第一输送管的另一端通过三通管分为两路,其中一路通过正向清洗回路阀组63连接气动增压水泵83的出液口82,第一输送管的另一路通过反向回收阀组62连接液体回收装置9。
51.第二输送管的一端连接待清洗工件4的第二流口42,第二输送管的另一端通过三通管分为两路,其中一路通过反向清洗回路阀组64连接气动增压水泵83的出液口82,第二输送管的另一路通过正向回收阀组61连接液体回收装置9。
52.气动增压装置8由进液管81、出液管82、气动增压水泵83组成,气动增压水泵83的液体入口通过进液管81从复合磨料搅拌桶5中抽取磁性悬浮磨料;电气控制系统7中plc控制模块控制正向清洗回路阀组63、正向回收阀组61打开,气动增压水泵83驱动磁性悬浮磨料经过正向清洗回路阀组63,从第一流口41进入待清洗工件4的内流道,从待清洗工件4的第二流口42流出,经过正向回收阀组61进入液体回收装置9;然后电气控制系统7中plc控制模块控制反向清洗回路阀组64、反向回收阀组62打开,气动增压水泵83驱动磁性悬浮磨料经过反向清洗回路阀组64,从第二流口42进入待清洗工件4的内流道,从待清洗工件4的第一流口41流出,经过反向回收阀组62进入液体回收装置9。如此正反往复给待清洗工件4的内部流道输入高压喷射混合悬浮磨料。
53.往复清洗流程由电气控制系统7中plc预编程控制完成,由控制系统程序自动控制进行往复清洗,为本领域已知;气动增压水泵83的压力范围在1-5mpa,流量在30-100l/min,功率在10-15kw。
54.复合磨料搅拌桶5由加热带51、电磁阀52、软管53组成;复合磨料搅拌桶5固定在上底板,复合磨料搅拌桶5的桶壁分为两层,里层设有加热带51,采用电加热方式,外层为保温层,桶口通过软管53连接气动增压水泵83的进液管81,软管53上安装有电磁阀52,将磨料源
源不断输送到气动增压水泵83。
55.内流道清理方法,具体为:
56.s1,如果待清洗工件4的内流道仅具有一个内流道出口和一个内流道进口,则待清洗工件4的第一流口41连接往复清洗系统6的第一输送管,待清洗工件4的第二流口42连接往复清洗系统6的第二输送管;待清洗工件4装夹在抛光件装夹器3中;
57.如果待清洗工件4不便于直接通过抛光件装夹器3装夹,或者待清洗工件4的内流道具有通孔,将待清洗工件4安装于可拆卸抛光容器内,可拆卸抛光容器上设有连接待清洗工件4内流道的第一流口41、第二流口42的连接口,可拆卸抛光容器装夹在抛光件装夹器3中;
58.s2,根据待清洗工件4的内流道结构及形态,预判抛光死角或抛光困难区域,设定向永磁体转盘12的往复运动路线,通过调节抛光件装夹器3和永磁体转盘12的位置,使得在永磁体转盘12运动过程中能够正对抛光死角或抛光困难区域;将永磁体17移动到与工件进口平齐位置,将永磁体17调整到合适高度,并调节步进电机21调整永磁体转盘12和待清洗工件4之间的距离,同时,设定往复清洗换向时间及频率。
59.s3,将复合磨料放入复合磨料搅拌桶5内,启动加热装置,并利用pid温控系统,将温度控制在低熔点合金磨料熔点范围内,混合抛光液压力控制在规定范围内(1-5mpa)。打开复合磨料搅拌桶5的电磁阀52和气动增压水泵83,将磨料和增压水汇聚到往复清洗系统6,通过往复清洗系统6依次换向对待清洗工件4进行往复清洗。
60.与此同时,启动永磁体17,永磁体17旋转运动,永磁体17在横向滑块16的带动下匀速滑动。如图5所示,复合抛光液按箭头方向运动,在此过程中永磁体17一直做旋转运动,并且固定在横向滑块16上旋转电机11沿着横向导轨15来回横向滑动从而带动复合磨料在内流道中运动相互碰撞,从而达到对内流道清粉、抛光和表面精整的效果。
61.永磁体17首先从
①
位置沿着横向导轨15滑动到
②
位置,
②
位置为抛光死角,永磁体17在此位置停留,永磁体17继续旋转,同时启动振动电机33,对抛光死角进行重点处理;根据零件内部复杂程度,如具有盲孔和角度小于45
°
的小角度流道,选择性启动纵向滑块14上下移动(通过对应的伺服电机驱动),使得永磁体17上下来回做匀速运动,使抛光更全面。抛光周期结束后永磁体17从位置
②
匀速移动到位置
③
,永磁体17按照
①
位置—
②
位置—
③
位置—
②
位置—
①
位置往复循环。
62.抛光结束后,关闭磁力驱动装置1,将待清洗工件4内的抛光液全部回收至液体回收装置9,然后关闭复合磨料搅拌桶5的电磁阀52,使增压水通过往复清洗系统6进入待清洗工件4内流道,冲洗内流道残余抛光磨料,循环2-3次,将待清洗工件4内流道液体回收至液体回收装置9,关闭所有电磁阀和水泵,将待清洗工件4取出。
63.试验表明再长的单向清洗也清洗不干净,这是由于一个方向清洗时杂质顺流附着很难清洗掉,但是当正反向往复清洗时,毛刺、杂质和污染物在正反往复折弯和扭曲力作用下被清洗掉,纳米级黑色磁粉粘在零件上很难清洗干净。本实用新型磁性悬浮磨料包括钢丸、白金刚玉、水、悬浮液,钢丸直径0.3-1mm,白金刚玉粒径0.12-0.20mm,通过钢丸磁力导向冲蚀,同时外加磁力和振动辅助抛光精整,适用于复杂零件微小的内流道,内流道的直径范围是1.5mm到5mm。
64.以上所述仅为本实用新型的较佳实施例而已,并非用于限定本实用新型的保护范
围。凡在本实用新型的精神和原则之内所作的任何修改、等同替换、改进等,均包含在本实用新型的保护范围内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。