1.本发明涉及安全装置、自走式机器人系统以及控制方法。
背景技术:
2.以往,公知有能够自走的行驶装置以及设置于该行驶装置的机器人所用的安全装置。例如在专利文献1中提出了这样的安全装置。
3.在专利文献1的安全装置中,设定为优先度高的机器人的反射率比优先度低的机器人的反射率高。由此,从优先度低的机器人投射的传感检测信号被优先度高的机器人反射,被优先度低的机器人以充分的强度接收。另一方面,从优先度高的机器人投射的传感检测信号被优先度低的机器人反射,被优先度高的机器人以不充分的强度接收。由于成为上述那样,所以专利文献1的安全装置能够使优先度高的机器人优先地进行作业。
4.专利文献1:日本特开平9-38891号公报
5.但是,在专利文献1的安全装置中,没有考虑与行驶装置以及机器人的动作状态对应地抑制上述行驶装置以及上述机器人的动作。
技术实现要素:
6.因此,本发明的目的在于提供能够与行驶装置以及机器人的动作状态对应地抑制上述行驶装置以及上述机器人的动作的安全装置、自走式机器人系统以及控制方法。
7.为了解决上述课题,本发明所涉及的安全装置具备:传感器,其安装于能够自走的行驶装置,或者安装于在上述行驶装置设置的机器人,用于以自身的位置作为基准而设定规定的检测区域,并对存在于上述规定的检测区域内的物体进行检测;动作抑制装置,其用于在通过上述传感器检测出在上述规定的检测区域内存在物体时,抑制上述行驶装置以及上述机器人的动作;以及区域变更装置,其用于与上述行驶装置以及上述机器人的动作状态对应地变更上述规定的检测区域。
8.根据本发明,能够提供能够与行驶装置以及机器人的动作状态对应地控制上述行驶装置以及上述机器人的动作的安全装置、自走式机器人系统以及控制方法。
附图说明
9.图1是表示本发明的一实施方式所涉及的自走式机器人系统应用于作业现场的状况的概略图。
10.图2是表示本发明的一实施方式所涉及的自走式机器人系统的整体结构的立体图。
11.图3是表示本发明的一实施方式所涉及的自走式机器人系统的主要部分结构的侧视图。
12.图4是表示本发明的一实施方式所涉及的自走式机器人系统的控制系统的框图。
13.图5是表示由本发明的一实施方式所涉及的安全装置设定的规定的可检测区域的
概略图。
14.图6是表示由本发明的一实施方式所涉及的安全装置设定的规定的检测区域的概略图,图6的(a)是表示第1检测区域的概略图,图6的(b)是表示第2检测区域的概略图。
15.图7是表示由本发明的一实施方式所涉及的安全装置设定的第3检测区域的概略图。
16.图8是表示本发明的一实施方式所涉及的控制方法的流程图。
具体实施方式
17.以下,基于附图对本发明的一实施方式所涉及的安全装置、自走式机器人系统以及控制方法进行说明。需要说明的是,不是通过本实施方式限定本发明。另外,以下,贯穿所有附图,对相同或者相当的要素标注相同的附图标记,并省略其重复的说明。
18.(自走式机器人系统10)
19.图1是表示本实施方式所涉及的自走式机器人系统应用于作业现场的状况的概略图。如图1所示,本实施方式所涉及的自走式机器人系统10为了将由输送机c依次搬运的多个工件w搬运至沿着输送机c的搬运方向并列的多个架子s的任一个而使用。在本实施方式中,两台自走式机器人系统10为了进行上述的搬运作业而配置于输送机c与多个架子s之间。需要说明的是,在两台自走式机器人系统10的附近,为了进行与两台自走式机器人系统10相同的搬运作业而配置有作业者p。
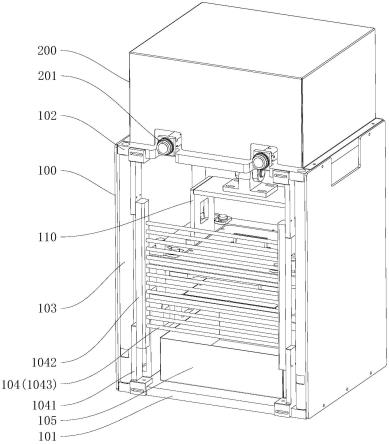
20.图2是表示本实施方式所涉及的自走式机器人系统的整体结构的立体图。如图2所示,自走式机器人系统10具备:作为能够自走的行驶装置的agv20(automated guided vehicle,无人搬运车)和设置于该agv20的上表面的作为机器人的垂直多关节型机器人40。另外,自走式机器人系统10还具备:为了agv20以及垂直多关节型机器人40而设置的安全装置50。
21.(agv20)
22.agv20具有:长方体状的壳体22、设置于壳体22内的驱动装置24(参照图4)、由驱动装置24驱动的两个驱动轮26a、26b、以及不与驱动装置24连接的四个车轮27a~27d。
23.驱动轮26a设置于agv20的底面的左缘部的中央,并由驱动装置24(参照图4)的伺服马达110g(同前)驱动。另外,驱动轮26b设置于agv20的底面的右缘部的中央,并由驱动装置24(同前)的伺服马达110h(同前)驱动。例如,agv20通过使驱动轮26a、26b的旋转速度相互不同,能够进行回旋以及右左拐弯。四个车轮27a~27d分别设置于agv20的底面的角部。四个车轮27a~27d也可以分别为全向脚轮。
24.(垂直多关节型机器人40)
25.垂直多关节型机器人40具备:基台41,其固定于agv20的壳体22的上表面;机器人臂42,其基端连结于基台41;末端执行器(未图示),其设置于机器人臂42的前端;以及机器人控制装置100,其用于控制机器人臂42以及末端执行器的动作的(参照图4。控制装置)。
26.如图2所示,机器人臂42具有六个关节轴jt1~jt6和由关节轴jt1~jt6依次连结的五个连杆24a~24e。需要说明的是,关节轴jt1~jt6由伺服马达110a~110f驱动(参照图4)。
27.关节轴jt1将基台41与连杆44a的基端以能够绕沿铅垂方向延伸的轴线旋转的方
式连结。连杆44a相对于基台41的旋转动作通过伺服马达110a(参照图4)进行。关节轴jt2将连杆44a的前端与连杆44b的基端以能够绕沿水平方向延伸的轴线旋转的方式连结。连杆44b相对于连杆44a的旋转动作通过伺服马达110b(同前)来进行。关节轴jt3将连杆44b的前端与连杆44c的基端以能够绕沿水平方向延伸的轴旋转的方式连结。连杆44c相对于连杆44b的旋转动作通过伺服马达110c(同前)来进行。
28.关节轴jt4将连杆44c的前端与连杆44d的基端以能够绕沿连杆44c的长边方向延伸的轴线旋转的方式连结。连杆44d相对于连杆44c的旋转动作通过伺服马达110d(参照图4)来进行。关节轴jt5将连杆44d的前端与连杆44e的基端以能够绕沿与连杆44d的长边方向正交的方向延伸的轴线旋转的方式连结。连杆44e相对于连杆44d的旋转动作通过伺服马达110e(同前)来进行。关节轴jt6将连杆44e的前端与末端执行器(未图示)的基端以能够扭转旋转的方式连结。末端执行器相对于连杆44e的旋转动作通过伺服马达110f(同前)来进行。
29.(安全装置50)
30.图3是表示本实施方式所涉及的自走式机器人系统的主要部分结构的侧视图。另外,图4是表示该自走式机器人系统的控制系统的框图。如图2~图4所示,本实施方式所涉及的安全装置50具备:安装于agv20的壳体22的两个激光传感器52a、52b(传感器)。
31.具体而言,激光传感器52a安装于壳体22的前表面与右表面相交的角的底部,激光传感器52b安装于壳体22的背面与左表面相交的角的底部。换言之,在俯视时,激光传感器52a、52b分别设置于壳体22的不相邻的两个角。需要说明的是,激光传感器52b具有与激光传感器52a相同的构造。因此,以下除特别需要的情况之外,仅对激光传感器52a进行说明,不重复与激光传感器52b相同的说明。
32.如图4所示,激光传感器52a具有:投光器53,其在后述的规定的可检测区域da内(参照图5)以自身为中心以放射状投射激光;受光器54,其与投光器53邻接配置,接收与存在于规定的可检测区域da内的物体(例如,图1所示的其他自走式机器人系统10以及作业者p等)碰撞而弹回的上述激光;以及检测器55,其基于受光器54的受光状态而检测存在于规定的可检测区域da内的物体(同前)。需要说明的是,针对图3所示的蜂鸣器60、状态显示灯62a~62d、以及保险杠开关64a、64b将后述。
33.如图4所示,机器人控制装置100具备:用于控制agv20以及垂直多关节型机器人40的动作的动作控制装置102。
34.动作控制装置102能够对机器人臂42的动作进行伺服控制。另外,动作控制装置102能够以设置于机器人臂42的前端的末端执行器(未图示)作为外部轴,对末端执行器的动作进行伺服控制。并且,动作控制装置102能够以驱动轮26a、26b作为外部轴,对驱动轮26a、26b的动作进行伺服控制,并且能够以驱动轮26c、26d作为外部轴,对驱动轮26c、26d的动作进行伺服控制。
35.需要说明的是,机器人控制装置100也可以控制后述的蜂鸣器60、状态显示灯62a~62d、以及保险杠开关64a、64b的动作。对图4所示的动作抑制装置104以及区域变更装置106将后述。
36.图5是表示由本实施方式所涉及的安全装置设定的规定的可检测区域的概略图。如图5所示,激光传感器52a通过投光器53以自身为中心以放射状投射激光。此时,激光传感器52a安装于agv20的壳体22的前表面与右表面相交的角的底部,因此,存在被壳体22妨碍
而无法投射激光的区域。即,在俯视时,激光传感器52a能够以自身为中心而在从壳体22的前表面至其右表面为止的270
°
的区域以放射状投射激光。由此,激光传感器52a能够对存在于图5中双点划线所示的可检测区域da内的物体进行检测。
37.同样,激光传感器52b通过投光器53,以自身为中心而以放射状投射激光。此时,激光传感器52b安装于agv20的壳体22的背面与左表面相交的角的底部,因此,存在被壳体22妨碍而无法投射激光的区域。即,在俯视时,激光传感器52b能够以自身为中心在从壳体22的背面至其左表面为止的270
°
的区域以放射状投射激光。由此,激光传感器52b能够对存在于图5中双点划线所示的可检测区域db内的物体进行检测。
38.基于安全装置50的可检测区域d(规定的可检测区域)是基于激光传感器52a的可检测区域da和基于激光传感器52b的可检测区域db合计的区域。需要说明的是,如图5所示,在俯视时,可检测区域da与可检测区域db相互的一部分重叠。
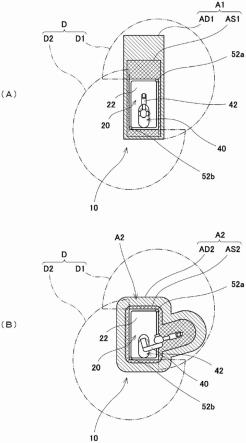
39.图6是表示由本实施方式所涉及的安全装置设定的规定的检测区域的概略图,图6的(a)是表示第1检测区域的概略图,图6的(b)是表示第2检测区域的概略图。
40.(检测区域a1)
41.在图6的(a)中,示出垂直多关节型机器人40没有动作,且agv20正向前方行驶的状态。如该图所示,在该状态下,激光传感器52a、52b以自身的位置作为基准而设定检测区域a1(规定的检测区域、第1检测区域),并设置为对存在于该检测区域a1内的物体进行检测。需要说明的是,检测区域a1是可检测区域d的一部分。换言之,检测区域a1包含于可检测区域d。
42.区域变更装置106(参照图4)通过遮挡可检测区域d的一部分而设定检测区域a1。检测区域a1设定为从agv20至少向该agv20的行驶方向延伸。在图6的(a)中,agv20向前方行驶,因此,检测区域a1从agv20向该agv20的前方延伸,并且从agv20向该agv20的后方稍微延伸,设定为在俯视时成为矩形状。需要说明的是,如图示那样,在俯视时,检测区域a1以包含agv20的方式设定为矩形状,在agv20的左侧以及右侧也分别稍微存在检测区域a1。
43.如图6的(a)所示,区域变更装置106能够在检测区域a1(规定的检测区域、第1检测区域)内设定减速区域ad1以及停止区域as1。如图示那样,减速区域ad1以及停止区域as1分别为矩形状,并且设定为停止区域as1包含减速区域ad1。
44.动作抑制装置104(参照图4)在通过激光传感器52a、52b检测出在减速区域ad1内存在物体时,通过使agv20的行驶减速,抑制agv20的动作。另外,动作抑制装置104在通过激光传感器52a、52b检测出在停止区域as1内存在物体时,通过使agv20的行驶停止,抑制agv20的动作。需要说明的是,动作抑制装置104在减速区域ad1内以及停止区域as1内这两者内都检测出物体的存在时,也可以通过使agv20的行驶停止而抑制agv20的动作。
45.此处,如图2、图3所示,本实施方式所涉及的安全装置50还具备蜂鸣器60,上述蜂鸣器60安装于agv20的壳体22的前表面与上表面相交的角。蜂鸣器60以沿壳体22的宽度方向延伸的方式安装。
46.也可以是,蜂鸣器60在通过激光传感器52a、52b检测出在减速区域ad1内存在物体时,通过发出警报声,报告发生了危险。另外,也可以是,蜂鸣器60在通过激光传感器52a、52b检测出在停止区域as1内存在物体时,通过发出比检测出在减速区域ad1内存在物体时大的警报声,报告发生了危险。
47.另外,如图2、图3所示,本实施方式所涉及的安全装置50还具备状态显示灯62a~62d,上述状态显示灯62a~62d安装于agv20的壳体22的前表面与左表面相交的角的中央部、壳体22的前表面与右表面相交的角的中央部、壳体22的背面与左表面相交的角的中央部以及壳体22的背面与右表面相交的角的中央部。
48.也可以是,状态显示灯62a~62b分别通过在由激光传感器52a、52b检测出在减速区域ad1内存在物体时点亮(或者,通过闪烁),报告发生了危险。另外,也可以是,状态显示灯62a~62b分别在通过激光传感器52a、52b检测出在停止区域as1内存在物体时,通过以与检测出在减速区域ad1内存在物体时不同的颜色点亮(或者,通过剧烈闪烁),从而报告发生了危险。
49.并且,如图2、图3所示,本实施方式所涉及的安全装置50还具备:保险杠开关64a,其安装于agv20的壳体22的前表面与底面相交的角,并沿壳体22的宽度方向延伸;和保险杠开关64b,其安装于agv20的壳体22的背面与底面相交的角,并沿壳体22的宽度方向延伸。保险杠开关64a、64b分别在自身碰撞了物体时,使agv20以及垂直多关节型机器人40的动作停止。
50.(检测区域a2)
51.图6的(b)中,示出agv20没有行驶,且垂直多关节型机器人40正进行动作的状态。如该图所示,在该状态下,激光传感器52a、52b以自身的位置作为基准而设定检测区域a2(规定的检测区域、第2检测区域),并设置为对存在于该检测区域a2内的物体进行检测。需要说明的是,检测区域a2是可检测区域d的一部分。换言之,检测区域a2包含于可检测区域d。
52.区域变更装置106(参照图4)通过遮挡可检测区域d中的与上述检测区域a1的情况不同的一部分,来设定检测区域a2。检测区域a2设定为,从垂直多关节型机器人40至少朝向该垂直多关节型机器人40可能动作的可动区域延伸。图6的(b)中,机器人臂42从agv20正向右方延伸,因此,检测区域a2以包含机器人臂42的方式从agv20向右方延伸。另外,设定为,在俯视时,检测区域a2中的除包含机器人臂42的部分以外的部分成为包含agv20的壳体22的矩形状。
53.如图6的(b)所示,区域变更装置106能够在检测区域a2(规定的检测区域、第2检测区域)内设定减速区域ad2以及停止区域as2。如图示那样,设定为停止区域as2包含减速区域ad2。
54.动作抑制装置104(参照图4)在通过激光传感器52a、52b检测出在减速区域ad2内存在物体时,通过使垂直多关节型机器人40的动作减速,来抑制垂直多关节型机器人40的动作。另外,动作抑制装置104在通过激光传感器52a、52b检测出在停止区域as2内存在物体时,通过使垂直多关节型机器人40停止,抑制垂直多关节型机器人40的动作。需要说明的是,动作抑制装置104在减速区域ad2内以及停止区域as2内这两者内都检测出物体的存在时,也可以通过使垂直多关节型机器人40停止,抑制垂直多关节型机器人40的动作。
55.需要说明的是,蜂鸣器60、状态显示灯62a~62d以及保险杠开关64a、64b各自的动作与基于图6进行了说明的检测区域a1的情况相同,因此,此处不重复其说明。
56.如上述那样,区域变更装置106能够与agv20以及垂直多关节型机器人40的动作状态对应地变更可检测区域d的遮挡的部分,来切换图6的(a)所示的检测区域a1与图6(b)所
示的检测区域a2。
57.(效果)
58.本实施方式所涉及的安全装置50能够与agv20以及垂直多关节型机器人40的动作状态对应地通过区域变更装置106切换检测区域a1与检测区域a2。由此,安全装置50能够与agv20以及垂直多关节型机器人40的动作状态对应地抑制agv20以及垂直多关节型机器人40的动作。
59.在本实施方式中,区域变更装置106在垂直多关节型机器人40没有动作且agv20行驶时,遮挡可检测区域d的一部分而设定图6的(a)所示的检测区域a1。另外,区域变更装置106在agv20没有行驶且垂直多关节型机器人40动作时,遮挡可检测区域d中的与上述检测区域a1的情况不同的一部分而设定图6的(b)所示的检测区域a2。在本实施方式中,通过像这样切换检测区域a1与检测区域a2,能够高效地抑制agv20以及垂直多关节型机器人40的动作。
60.在本实施方式中,区域变更装置106在检测区域a1内设定减速区域ad1以及停止区域as1,并且在检测区域a2内设定减速区域ad2以及停止区域as2。由此,在本实施方式中,能够妥善地抑制agv20以及垂直多关节型机器人40的动作。
61.在本实施方式中,agv20的壳体22形成为长方体状,并且,在俯视时,激光传感器52a、52b分别设置于壳体22的不相邻的两个角。由此,在本实施方式中,仅使用两个激光传感器52a、52b就能够得到足够大的可检测区域d。
62.本实施方式所涉及的安全装置50具备蜂鸣器60、状态显示灯62a~62d以及保险杠开关64a、64b,因此,能够更可靠地确保安全。
63.(检测区域a3)
64.图7是表示由上述实施方式所涉及的安全装置设定的第3检测区域的概略图。图7中,示出agv20正在行驶,并且垂直多关节型机器人40正在动作的状态。如该图所示,区域变更装置106(参照图4)通过遮挡可检测区域d中的与上述检测区域a1、a2的情况不同的一部分,来设定检测区域a3(规定的检测区域、第3检测区域)。检测区域a3设定为在俯视时其中心与agv20的壳体22的中心重叠的圆形状。
65.如图7所示,区域变更装置106能够在检测区域a3内设定减速区域ad3以及停止区域as3。如图示那样,减速区域ad3以及停止区域as3分别为同心的圆形状,并且设定为停止区域as3包含减速区域ad3。
66.例如,也可以是,区域变更装置106在agv20行驶并且垂直多关节型机器人40动作时,与agv20以及垂直多关节型机器人40的动作速度对应地变更检测区域a3的大小(换言之,减速区域ad3以及停止区域as3的大小)。例如,也可以是,区域变更装置106在agv20以及垂直多关节型机器人40中的至少任一者进行高速动作时,增大检测区域a3。
67.需要说明的是,在agv20行驶并且垂直多关节型机器人40动作时,区域变更装置106也可以取代图7所示的检测区域a3的形状而使检测区域的形状成为图6的(a)所示的检测区域a1的形状,也可以成为图6的(b)所示的检测区域a2的形状。
68.(变形例)
69.根据上述说明,本发明的许多改进、其他实施方式对于本领域技术人员而言是不言而喻的。因此,上述说明应该理解为仅是示例,并且是为了向本领域技术人员传授实施本
发明的最佳方式的目的而提供的。能够不脱离本发明的精神地实质变更其构造以及/或者功能的详情情况。
70.在上述实施方式中,说明了如下情况:壳体22为长方体状,在俯视时,激光传感器52a、52b分别设置于壳体22的不相邻的两个角。但是,不限定于这种情况,壳体22也可以是除长方体状以外的多棱柱状,也可以是其他形状。另外,例如,也可以仅将一个激光传感器配置于壳体22的上表面的中央。并且,也可以将一个或者三个以上激光传感器安装于壳体22。另外,激光传感器也可以安装于垂直多关节型机器人40。
71.在上述实施方式中,说明了如下情况:区域变更装置106能够切换图6的(a)所示的检测区域a1(第1检测区域)与图6的(b)所示的检测区域a2(第2检测区域)。
72.但是,不限定于这种情况,例如,在俯视时,第1检测区域也可以设定为从agv20至少向该agv20的行驶方向延伸的椭圆状,也可以设定为其他形状。另外,例如,在俯视时,第2检测区域也可以设定为与第1检测区域不同的矩形状,也可以设定为其他形状。
73.在上述实施方式中,说明了如下情况:区域变更装置106在检测区域a1(规定的检测区域、第1检测区域)内设定减速区域ad1以及停止区域as1,在检测区域a2(规定的检测区域、第2检测区域)内设定减速区域ad2以及停止区域as2。但是,不限定于这种情况,区域变更装置106能够在规定的检测区域内设定减速区域和停止区域中的至少任一者即可。
74.在上述实施方式中,说明了如下情况:传感器构成为所谓的反射型的激光传感器52a、52b。但是,不限定于这种情况,传感器也可以构成为与安装于外壁等的传感器配合的所谓的透射式的激光传感器,也可以构成为其他传感器。
75.在上述实施方式中,说明了如下情况:机器人构成为具有六个关节轴jt1~jt6的垂直多关节型机器人40。但是,不限定于这种情况,机器人也可以构成为除六轴以外的具有至少一个关节轴的垂直多关节型机器人。或者,机器人也可以构成为双臂型机器人,也可以构成为水平多关节型机器人,或者,也可以构成为其他机器人。
76.在上述实施方式中,说明了如下情况:动作抑制装置104以及区域变更装置106分别构成为用于控制agv20以及垂直多关节型机器人40的动作的机器人控制装置100(控制装置)的一部分。但是,不限定于这种情况,动作抑制装置以及区域变更装置也可以与控制装置分开设置。
77.(控制方法)
78.最后,主要基于图8对使用上述的安全装置50控制agv20(行驶装置)以及垂直多关节型机器人40(机器人)的动作的控制方法的一个例子进行说明。图8是表示本施形态所涉及的控制方法的流程图。
79.首先,通过激光传感器52a、52b(传感器),进行设定规定的检测区域的第1步骤(图8中步骤s1)。
80.接下来,进行第2步骤,在该步骤中,与agv20(行驶装置)以及垂直多关节型机器人40(机器人)的动作状态对应地通过区域变更装置106变更规定的检测区域(图8中步骤s2)。
81.最后,进行第3步骤,在该步骤中,在通过激光传感器52a、52b(传感器)检测出在规定的检测区域内存在物体时,通过动作抑制装置104抑制agv20(行驶装置)以及垂直多关节型机器人40(机器人)的动作(图8中步骤s3)。
82.根据上述结构,本实施方式所涉及的控制方法能够使用上述说明的安全装置50,
与agv20(行驶装置)以及垂直多关节型机器人40(机器人)的动作状态对应地抑制agv20以及垂直多关节型机器人40。
83.(总结)
84.为了解决上述课题,本发明的一实施方式所涉及的安全装置具备:传感器,其安装于能够自走的行驶装置,或者安装于在上述行驶装置设置的机器人,用于以自身的位置作为基准而设定规定的检测区域,并对存在于上述规定的检测区域内的物体进行检测;动作抑制装置,其用于在通过上述传感器检测出在上述规定的检测区域内存在物体时,抑制上述行驶装置以及上述机器人的动作;以及区域变更装置,其用于与上述行驶装置以及上述机器人的动作状态对应地变更上述规定的检测区域。
85.根据上述结构,本发明的一实施方式所涉及的安全装置能够与行驶装置以及机器人的动作状态对应地抑制上述行驶装置以及上述机器人的动作。
86.也可以是,上述区域变更装置能够切换第1检测区域与第2检测区域,上述第1检测区域为在上述机器人没有动作且上述行驶装置行驶时从上述行驶装置至少向上述行驶装置的行驶方向延伸的上述规定的检测区域,上述第2检测区域为在上述行驶装置没有行驶且上述机器人动作时从上述机器人至少朝向上述机器人可能动作的可动区域延伸的上述规定的检测区域。
87.根据上述结构,本发明的一实施方式所涉及的安全装置能够高效地抑制行驶装置以及机器人的动作。
88.例如,也可以是,上述区域变更装置在上述行驶装置行驶并且上述机器人动作时,能够将上述规定的检测区域变更为第3检测区域。
89.上述区域变更装置能够在上述规定的检测区域内设定减速区域以及停止区域中的至少任一者,上述动作抑制装置在通过上述传感器检测出在上述减速区域内存在物体时,使上述行驶装置以及上述机器人的动作减速,在通过上述传感器检测出在上述停止区域内存在物体时,使上述行驶装置以及上述机器人的动作停止。
90.根据上述结构,本发明的一实施方式所涉及的安全装置能够妥善地抑制行驶装置以及机器人的动作。
91.例如,也可以是,上述传感器构成为激光传感器,上述激光传感器具有:投光器,其在将上述规定的检测区域包含在内的规定的可检测区域内以自身为中心以放射状投射激光;受光器,其与上述投光器邻接配置,并接收与存在于上述规定的可检测区域内的物体碰撞而弹回的上述激光;以及检测器,其基于上述受光器的受光状态而检测存在于上述规定的可检测区域内的物体,上述区域变更装置通过变更上述规定的可检测区域的遮挡的部分,来变更上述规定的检测区域。
92.也可以是,上述行驶装置具有:长方体状的壳体、设置于上述壳体的驱动装置、以及由上述驱动装置驱动的驱动轮,在俯视时,上述激光传感器至少分别设置于上述壳体的不相邻的两个角。
93.根据上述结构,本发明的一实施方式所涉及的安全装置无需设置必要以上的激光传感器,能够得到足够大的可检测区域。
94.也可以是,上述区域变更装置以及上述动作抑制装置中的至少任一者构成为用于控制上述行驶装置以及上述机器人的动作的控制装置的一部分。
95.根据上述结构,能够使装置整体小型化。
96.为了解决上述课题,本发明所涉及的自走式机器人系统具备:具有上述任一种结构的安全装置、上述行驶装置、上述机器人。
97.根据上述结构,本发明的一实施方式所涉及的自走式机器人系统具备具有上述任一种结构的安全装置,因此,能够与行驶装置以及机器人的动作状态对应地抑制上述行驶装置以及上述机器人的动作。
98.例如,也可以是,上述机器人构成为垂直多关节型机器人。
99.例如,也可以是,上述行驶装置构成为无人搬运车。
100.为了解决上述课题,本发明的一实施方式所涉及的控制方法用于使用具备上述任一种构造的安全装置来控制上述行驶装置以及上述机器人的动作,上述控制方法的特征在于,具备:第1步骤,在该步骤中,设定上述规定的检测区域;第2步骤,在该步骤中,与上述行驶装置以及上述机器人的动作状态对应地,通过上述区域变更装置来变更上述规定的检测区域;以及第3步骤,在该步骤中,在通过上述传感器检测出在上述规定的检测区域内存在物体时,通过上述动作抑制装置抑制上述行驶装置以及上述机器人的动作。
101.根据上述结构,本发明的一实施方式所涉及的控制方法能够使用具备上述任一种构造的安全装置,与行驶装置以及机器人的动作状态对应地抑制上述行驶装置以及上述机器人的动作。
102.附图标记说明
103.10...自走式机器人系统;20...agv;22...壳体;24...驱动装置;26a、26b...驱动轮;27a~27d...车轮;40...垂直多关节型机器人;41...基台;42...机器人臂;44...连杆;50...安全装置;52...激光传感器;53...投光器;54...受光器;55...检测器;60...蜂鸣器;62a~62d...状态显示灯;64a、64b...保险杠开关;100...机器人控制装置;102...动作控制装置;104...动作抑制装置;106...区域变更装置;110a~110h...伺服马达;a1~a3...检测区域;d、d1、d2...可检测区域;c...输送机;p...作业者;s...架子;w...工件。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。