1.本发明涉及塔机顶升过程中垂直度监测的技术领域,具体的是一种基于图像识别的塔机顶升过程中垂直度监测系统及方法。
背景技术:
2.随着建筑工程规模的扩大和建设速度的提高,塔式起重机(以下简称塔机)得到了越来越广泛的应用。但因其重心高,危险性大,经常会发生安全事故,威胁人民的生命财产安全。随着高层建筑越来越多,因此施工的塔身也越来越高,伴随的危险度也随之增加。为了提高施工过程中塔机的安全性,塔机垂直度一直是大家比较关注的对象,目前,塔机垂直度监测主要有标尺检测法和经纬仪检测法两种。但是使用这两种方法检测垂直度时存在一定的危险性,测量误差也比较大。
技术实现要素:
3.本发明的目的在于提出一种基于图像识别的塔机顶升过程中垂直度监测系统及方法以解决上述背景技术中提出的技术问题,能够安全、快速、准确的监测塔机顶升过程中的垂直度。
4.本发明解决上述技术问题所采用的技术方案是:
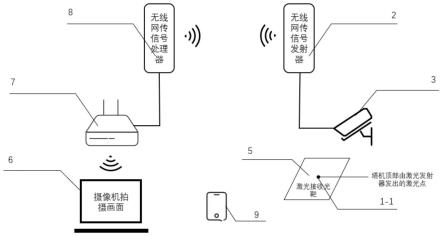
5.基于图像识别的塔机顶升过程中垂直度监测系统,该垂直度监测系统包括固定在塔机驾驶室下铁网架的网孔内的激光发射器、固定在塔机主弦杆外侧的无线网传信号发射器、摄像头、放置于所述摄像头下方的激光接收靶、个人电脑、wifi路由器、无线网传信号发射器、智能手机;所述激光接收靶用于接收激光发射器发射的激光射线并在其上形成激光点,所述摄像头用于拍摄激光点的动态运动轨迹,所述摄像头与无线网传信号发射器通过网线连接,所述wifi路由器与无线网传信号处理器通过网线连接,所述智能手机用于拍摄塔机顶升过程中塔身动态过程。
6.进一步地,所述摄像头通过可调节固定支座固定于钢柱连接构件上部,所述钢柱连接构件固定在混凝土承台上。
7.进一步地,所述钢柱连接构件上部有两个相同大小的螺栓开孔,钢柱连接结构件下部钢板开有四个相同大小的螺栓开孔。
8.进一步地,所述激光接收靶带有标准刻度,内置水平气泡校准仪。
9.本发明还提供一种基于图像识别的塔机顶升过程中垂直度监测方法,所述监测方法包括以下步骤:
10.步骤一:塔机顶升前,工作人员通过遥控开关打开激光发射器,确保激光射线不被遮挡,激光点能够落在激光接收靶上,调整激光发射器前端的变焦调节环,使得激光点在激光接收靶尽可能聚焦为清晰的点状形态;
11.步骤二:智能手机固定在能够拍摄塔机顶升过程中塔身动态过程的地点,调整智能手机拍摄画面中的时间刻度同摄像头拍摄画面中的时间刻度一致,保证摄像头拍摄的激
光点动态运动轨迹能够反应智能手机拍摄的塔机顶升过程;
12.步骤三:顶升过程中,智能手机拍摄画面中的时间刻度同摄像头拍摄画面中的时间刻度一致,智能手机拍摄塔机顶升过程,激光点随着塔机顶升过程中的工况在激光接收靶上的运动路径反映出塔机顶升时塔身偏移的动态变化;
13.步骤四:对摄像头拍摄的激光点图片进行图像识别处理,通过提取相同时间间隔激光点中心点像素坐标,识别相同时间间隔获取的激光运动路径图像中激光点距离初始原点的像素间隔数,即提取激光点中心点坐标,自定义激光点初始原点,激光点中心在数字图像坐标系中的像素坐标为(x0,y0),经过某一时间间隔获取t时刻的激光点运动路径图像,激光点中心在数字图像坐标系的像素坐标为(x1,y1),相同时间间隔激光点距离初始原点的像素间隔数为进而得到在对应时间刻度下塔机在顶升过程中实际的偏移距离,再计算塔机对应时刻的垂直度。
14.进一步地,步骤四中所述对摄像头拍摄的激光点图片进行图像识别处理,具体是对摄像头获取激光点的彩色图像信息进行灰度化处理、滤波处理去除噪声、图像二值化处理、形态学图像处理、目标图像连通区域标记、像素坐标均值质心法获取激光中心点像素坐标,计算激光中心点距离。
15.进一步地,所述对于激光点的彩色图像信息进行灰度化处理,包括将彩色图像先转换为灰度图像,并对灰度图像采用灰度映射的方法,灰度映射公示如下:
[0016][0017]
式中,f为像素点坐标的像素值大小,f
max
,f
min
分别为变换阈值的上下限。
[0018]
进一步地,所述图像二值化处理,包括定义像素数计算公式,对于m
×
n的图像像素矩阵,其中i定义为像素值大小,m,n为像素坐标系中的行坐标和列坐标:
[0019][0020][0021]
其中0≤i≤255,遍历每行的像素,对于所有count(f;i)》0的像素值,最大像素值记为 i
max
,最小像素值记为i
min
,从最小像素值i
min
开始依次获取count(f;i)》0的连续像素值,记第一段连续像素值的最大像素值为i
1-max
,然后再依次获取ount(f;i)=0的连续像素值,记第二段连续像素值的最小像素值为i
2-max
,重复上述过程,直到i
k-max
=i
max
,将所获得的 i
k-min
作为灰度图像二值化的分割阈值,基于二值化图像的效果,确定最合适的分割阈值。
[0022]
进一步地,所述目标图像连通区域标记包括从像素矩阵首行元素开始逐行遍历矩阵像素,当碰到白色像素点时,将该像素点入像素队列,然后判断像素队列是否为空,不为空时,取出该像素,选取八联通域,判断该像素8个连通区域,如果也存在白色像素点,则将该像素标记为激光点设定标签编号,并将该元素像素坐标储存于像素坐标队列,然后从像
素队列释放该像素,继续遍历,重复上述过程。
附图说明
[0023]
图1为本发明基于图像识别的垂直度监测系统的示意图;
[0024]
图2为本发明安装塔机上的激光发射器,无线网桥,摄像头以及激光接收靶的示意图;
[0025]
图3为本发明摄像头在塔机底部固定的装置示意图;
[0026]
图4为本发明摄像头拍摄画面中激光点位于激光接收光靶的图像示意图;
[0027]
图5为本发明基于塔机顶升过程中结构垂直度监测方法流程图;
[0028]
图6为本发明基于图像识别基础流程提出改进的识别方法流程图。
具体实施方式
[0029]
下面结合附图和具体实施方式,进一步阐明本发明,应理解下述具体实施方式仅用于说明本发明而不用于限制本发明的范围。
[0030]
为了便于理解本发明,下面将参照相关附图对本发明进行更加全面的描述,附图中给出了本发明的若干实施例,但是本发明可以通过不同的形式来实现,并不限于文本所描述的实施例,相反的,提供这些实施例是为了使对本发明公开的内容更加透彻全面。
[0031]
实施例,请参照附图1~3,一种基于图像识别的塔机顶升过程中结构垂直度监测系统主要由激光发射器1;无线网传信号发射器2;无线网传信号处理器8;wifi路由器7;摄像头 3;钢柱连接构件4;个人电脑6;激光接收靶5,智能手机9组成。激光发射器1固定在塔机驾驶室下铁网架的网孔内,摄像头3与无线网传信号发射器2通过网线连接,无线网传信号发射器2固定在塔机合适高度的主弦杆外侧,wifi路由器7与无线网传信号处理器8通过网线连接,在摄像头3固定在钢柱连接构件4上部,钢柱连接构件4底座与混凝土承台固定,激光接受靶5放置于摄像头3下方,智能手机9固定在能够拍摄塔机顶升过程中塔身动态过程的合适地点。
[0032]
所述激光发射器1采用400mw遥控防水绿光点状可变焦的激光发射器,配备配套的遥控开关以及电源适配器。
[0033]
所述摄像头3选用海康威视400w家用枪机摄像头。
[0034]
所述激光接收靶5上的刻度为10mm/格,且带有水平气泡校准仪5-1
[0035]
所述摄像头3通过可调节固定支座3-1固定于钢柱连接构件4上部。
[0036]
所述钢柱连接构件4上部有两个相同大小的螺栓开孔4-1,钢柱连接结构件4下部钢板开有四个相同大小的螺栓开孔4-2。
[0037]
所述线网传信号发射器2正对无线网传信号处理器8,两者之间不受遮蔽物遮挡。
[0038]
一种基于图像识别的塔机顶升过程中结构垂直度监测方法,所述方法包括以下步骤:
[0039]
步骤一:塔机顶升前,工作人员通过遥控开关打开激光发射器,确保激光射线不被遮挡,激光点能够落在激光接收靶上,调整激光发射器前端的变焦调节环,使得激光点尽可能聚焦为清晰的点状形态。
[0040]
步骤二:智能手机固定在能够拍摄塔机顶升过程中塔身动态过程的合适地点,调
整智能手机拍摄画面中的时间刻度同摄像头拍摄画面中的时间刻度一致,保证摄像头拍摄的激光点动态运动轨迹能够反应手机拍摄的塔机顶升过程。
[0041]
步骤三:顶升过程中,智能手机拍摄画面中的时间刻度同摄像头拍摄画面中的时间刻度一致,智能手机拍摄塔机顶升过程,激光点随着塔机顶升过程中的工况在激光接收靶上的运动路径反映出塔机顶升时塔身偏移的动态变化。
[0042]
步骤四:对摄像头拍摄的激光点图片进行图像识别处理,通过提取相同时间间隔激光点中心点像素坐标坐标。识别相同时间间隔获取的激光运动路径图像中激光点距离初始原点的像素间隔数,即提取激光点中心点坐标,自定义激光点初始原点,激光点中心在数字图像坐标系中的像素坐标为(x0,y0),经过某一时间间隔获取t时刻的激光点运动路径图像,激光点中心在数字图像坐标系的像素坐标为(x1,y1),相同时间间隔激光点距离初始原点的像素间隔数为进而得到在对应时间刻度下塔机在顶升过程中实际的偏移距离,再根据相应公式计算塔机对应时刻的垂直度。
[0043]
所述一种基于图像识别的塔机顶升过程中结构垂直度监测方法,通过摄像头获取激光点的彩色图像信息、对于彩色图像信息进行灰度化处理、滤波处理去除噪声、图像二值化处理、形态学图像处理、目标图像连通区域标记、像素坐标均值质心法获取激光中心点像素坐标,计算激光中心点距离。
[0044]
所述对于彩色图像信息进行灰度化处理,包括将彩色图像先转换为灰度图像,并对灰度图像采用灰度映射的方法,f为像素点坐标的像素值大小,f
max
,f
min
分别为变换阈值的上下限,定义灰度映射公示如下:
[0045][0046]
所述降噪处理的图像进行图像二值化处理,包括定义像素数计算公式,对于m
×
n的图像像素矩阵,其中i定义为像素值大小,m,n为像素坐标系中的行坐标和列坐标:
[0047][0048][0049]
其中0≤i≤255,遍历每行的像素,对于所有ount(f;i)》0的像素值,最大像素值记为i
max
,最小像素值记为i
min
,从最小像素值i
min
开始依次获取ount(f;i)》0的连续像素值,记第一段连续像素值的最大像素值为i
1-max
,然后再依次获取ount(f;i)=0的连续像素值,记第二段连续像素值的最小像素值为i
2-max
,重复上述过程,直到i
k-max
=i
max
,将所获得的i
k-min
作为灰度图像二值化的分割阈值,基于二值化图像的效果,确定最合适的分割阈值。
[0050]
所述标记算法包括从像素矩阵首行元素开始逐行遍历矩阵像素,当碰到白色像素点时,将该像素点入像素队列,取出该像素,选取八联通域,判断该像素八连通区域,如果也存在白色像素点,则将该像素标记为激光点设定标签编号,并将该元素像素坐标储存于像素坐标队列,然后从像素队列释放该像素,继续遍历,重复上述过程。
[0051]
以上所述仅是本发明的实施方式,尽管本发明对几个所述实施例进行描述,但并非旨在局限于这些实施例。对于本技术领域的普通技术人员来说,在不脱离本发明原理的基础上,可对本发明进行改进,所有的改进都列入本发明权利要求的范围内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。