1.本发明涉及激光除锈技术领域,具体是一种激光清洗机。
背景技术:
2.在金属生产、工程建筑、船舶制造等与金属使用密切相关的行业,有效地去除金属锈蚀层一直是大家关注的难题,目前主要的清洗方式有化学清洗、机械清洗和超声波清洗,化学清洗的最大弊端是环境的污染;机械清洗,劳动强度大,工作环境差,质量不可控;超声波清洗对象与尺寸受限,应用范围均较窄,激光清洗是一种新型高效的环保清洗技术,可利用激光的方向性和高能量脉冲激光束来清除掉材料表面的污染物,区别于机械清洗、化学清洗,激光清洗具有无研磨、非接触、无热效应的特点,并且适应于几乎所有材质物体的清洗,尤其是激光清洗精度极高,在清洗领域具有比较高的地位。
3.目前,激光对金属表面的清洗虽然已得到应用,但是由于激光与清洗面之间的距离以及激光频率之间的调节要求很高,实施难度较大,因此激光清洗一直没有广泛推广应用,虽然市场上也出现一种手持式激光清洗器,由于其结构的限制,清洗幅面小,清洗效率较低,不能用于大面积的清洗,而且手持式激光清洗器与清洗面之间的距离不易精确控制,导致清洗不均匀,效果差,远远达不到人们的要求。
4.对于管状件来讲,由于其直径规格较多,除锈时多采用传统的人工除锈方式,该种方式已远远不能达到高效率、高质量的要求,且激光对操作人员的伤害较大,因此,为了能够更加高效率、高质量和针对不同规格管状生锈材料的处理,提高操作人员使用的安全性,我们亟需设计一种激光清洗机。
技术实现要素:
5.本发明的目的是为了解决现有技术中存在的缺点,而提出的一种激光清洗机。
6.为解决上述技术问题,本发明提供如下技术方案:一种激光清洗机,包括基体组件、移动组件、定位组件和激光组件,移动组件和激光组件均设置在基体组件上,定位组件设置在移动组件上,定位组件包括驱动定位单元和移动夹持单元,驱动定位单元和移动夹持单元相对设置在移动组件上,激光组件包括三轴机械臂和激光器,激光器可拆卸设置在三轴机械臂上。
7.采用上述结构,利用基体组件将移动组件、定位组件和激光组件集成为一体,作为一个独立的机构使用,整体结构紧凑,方便使用,利用移动组件带动定位组件在上料位和工作位之间切换,实现上料和工作的区分,避免激光工作时因距离操作人员太近,对操作人员的人身安全造成损害,利用定位组件对需要清洗的工件进行夹持,并可满足不同长度、不同直径工件的夹持要求,适用范围广,还可通过定位组件带动被夹持的工件旋转,实现对工件全周表面的激光清洗,利用三轴机械臂带动激光器实现三维空间的移动,完成对旋转工件的激光清洗工作,可满足不同长度、不同直径工件的清洗要求,使用范围广,清洗效率高。
8.优选的,基体组件包括底座和防护单元,底座为型材钢板结构,防护单元设置在底
座上,防护单元包括型材框架和对开门组件,型材框架上设置有侧护板、后护板和前护板,对开门组件包括动力单元和对称设置的两个门扇,动力单元通过顶板设置在型材框架的顶端,动力单元包括第一电机、两个滑轨和两个齿条,第一电机通过安装座设置在顶板上,第一电机的输出轴上固设有齿轮,两个滑轨设置在顶板上,且分别位于第一电机的两侧,两个齿条分别滑动设置在两个滑轨上,且均与齿轮相啮合,两个门扇对称设置在型材框架前端面,两个门扇分别与两个齿条相连接。
9.采用上述结构,利用型材钢板加工而成的底座,整体结构强度高,使用稳定性强,利用型材框架、安装在型材框架上的侧护板、后护板和前护板以及对开门组件组成一个封闭的空间,在对工件进行激光清洗时,整体在封闭的空间内进行,安全性高,不会对环境造成污染,利用相互啮合的齿轮和齿条,通过齿条在滑轨上的滑动,实现门扇的自动开合,结构简单,控制方便。
10.优选的,移动组件包括气缸、移动底板和两个第一直线导轨,气缸固定端设置在底座上,气缸伸出端可拆卸设置在移动底板上,两个第一直线导轨对称设置在气缸两侧,移动底板滑动设置在两个第一直线导轨上,利用气缸带动移动底板沿第一直线导轨移动,从而带动安装在移动底板上的定位组件在上料位和工作位之间移动,方便工件的上料和清洗作业。
11.优选的,驱动定位单元包括电机支架、第二电机、旋转轴承座和旋转定位轴,电机支架设置在移动底板一端,第二电机和旋转轴承座分别设置在电机支架两侧,旋转定位轴一端可转动设置在旋转轴承座内,且与第二电机输出轴传动连接,利用第二电机输出轴的旋转带动旋转定位轴转动,从而带动被夹持的工件转动,实现对工件表面激光清洗除锈作业。
12.优选的,移动夹持单元包括电机丝杠滑轨模组和浮动定位单元,电机丝杠滑轨模组通过横移底板设置在移动底板另一端,浮动定位单元通过定位底板移动设置在电机丝杠滑轨模组上,浮动定位单元包括定位座、定位杆和定位盘,定位座设置在定位底板上,定位盘一体设置在定位杆一端,定位杆另一端可转动且可滑动设置在定位座内,定位杆上套设有弹簧。
13.采用上述结构,利用电机丝杠滑轨模组带动浮动定位单元移动,可满足对不同长度工件的夹持要求,利用套设在定位杆上的弹簧实现对工件的浮动夹持,防止夹持过程中刚性接触对工件表面造成损坏,可转动的定位杆可使得被夹持的工件在驱动定位单元的带动下旋转。
14.优选的,三轴机械臂包括x轴模组、y轴模组和z轴模组,x轴模组通过若干支座设置在底座上,y轴模组与x轴模组传动连接,z轴模组与y轴模组传动连接,激光器设置在z轴模组上。
15.采用上述结构,利用x轴模组、y轴模组和z轴模组可带动激光器实现位置的调整,带动激光器进行激光清洗作业,并可使激光器满足较大范围的工作要求,激光器可以在三维空间内移动,移动范围大,适用范围广,工作效率高,使用方便。
16.优选的,一种激光清洗机还包括焊烟净化器,焊烟净化器设置在底座内,用于收集净化激光器清洗时产生的烟尘。
17.优选的,旋转定位轴远离旋转轴承座一端的端面上设置有第一隔垫,定位盘远离
定位杆的端面上设置有第二隔垫,第一隔垫和第二隔垫均由或聚氨酯或尼龙材质制成,利用由聚氨酯或尼龙制成的第一隔垫和第二隔垫,防止夹持工件时对工件表面造成损害。
18.优选的,侧护板、后护板、前护板和门扇均为深色亚克力板,利用深色亚克力板遮挡激光器光线,提高操作人员的使用安全性。
19.优选的,旋转轴承座内设置有若干轴承,若干轴承均套设在旋转定位轴上,定位座上设置有铜套,定位杆穿透设置在铜套内,利用轴承提高旋转定位轴旋转的流畅性,利用铜套提高定位杆转动及滑动的灵活性,提高旋转定位轴和定位杆的使用寿命。
20.综上所述,本发明可以作为独立的设备单独使用,使用方便,能够满足不同长度和不同直径工件的激光清洗要求,适用范围广,使用安全性高,对环境不会造成污染,清洗质量和清洗效率高,整体操作便捷,实用性强。
附图说明
21.图1为本发明立体结构示意图(门扇关闭状态);图2为本发明立体结构示意图(门扇打开状态);图3为本发明立体结构示意图(无防护单元);图4为本发明的防护单元立体结构示意图;图5为本发明图4的a处局部放大结构示意图;图6为本发明的移动组件立体结构示意图;图7为本发明的驱动定位单元立体结构示意图;图8为本发明的驱动定位单元主视局部剖视结构示意图;图9为本发明的移动夹持单元立体结构示意图;图10为本发明的移动夹持单元主视局部剖视结构示意图;图11为本发明的激光组件立体结构示意图。
22.图中:1、底座;2、型材框架;3、侧护板;4、后护板;5、前护板;6、门扇;7、顶板;8、第一电机;9、滑轨;10、齿条;11、安装座;12、齿轮;13、气缸;14、移动底板;15、第一直线导轨;16、电机支架;17、第二电机;18、旋转轴承座;19、旋转定位轴;20、电机丝杠滑轨模组;21、横移底板;22、定位座;23、定位杆;24、定位盘;25、弹簧;26、x轴模组;27、y轴模组;28、z轴模组;29、激光器;30、支座;31、焊烟净化器;32、第一隔垫;33、第二隔垫;34、轴承;35、铜套;36、定位底板。
具体实施方式
23.为了便于理解本发明,下面将参照相关附图对本发明进行更全面的描述。
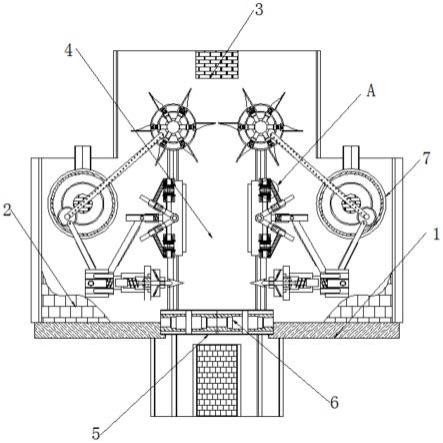
24.参照图1-图11,一种激光清洗机,包括基体组件、移动组件、定位组件和激光组件,基体组件包括底座1和防护单元,底座1采用钢管型材和钢板焊接而成,整体强度高,使用稳定性强,防护单元安装在底座1上,用于保证激光清洗时的使用安全性,移动组件和激光组件均安装在底座1上,定位组件安装在移动组件上,由移动组件带动定位组件在上料位和工作位之间切换,操作方便,使用便捷性高,定位组件包括驱动定位单元和移动夹持单元,驱动定位单元和移动夹持单元均安装在移动组件上,且两者相对安装,用于实现对待加工工件的夹持,并带动被夹持的工件进行旋转,激光组件包括三轴机械臂和激光器29,三轴机械
臂安装在底座1上,激光器29采用螺栓安装在三轴机械臂上,通过三轴机械臂带动激光器29在三维空间内移动,带动激光器29完成对工件的激光清洗。
25.采用上述结构,利用基体组件将移动组件、定位组件和激光组件集成为一体,作为一个独立的设备使用,整体结构紧凑,方便使用,利用移动组件带动定位组件在上料位和工作位之间切换,实现上料和工作的区分,避免激光器29在工作时因距离操作人员太近,对操作人员的人身安全造成损害,使用安全性高,利用定位组件对需要清洗的工件进行夹持,并可满足不同长度、不同直径工件的夹持要求,适用范围广,还可通过定位组件带动被夹持的工件旋转,实现对工件全周表面的激光清洗,利用三轴机械臂带动激光器29实现三维空间的移动,完成对旋转工件的激光清洗工作,可满足不同长度、不同直径工件的清洗要求,使用范围广,清洗效率高。
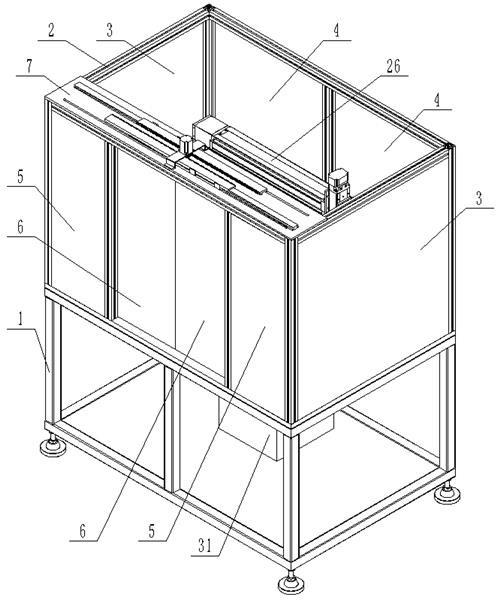
26.参照图1-图5,底座1可通过安装在其底部四角的可调支脚放置在地面上,防护单元包括型材框架2和对开门组件,型材框架2上连接有侧护板3、后护板4和前护板5,侧护板3、后护板4和前护板5均采用深色亚克力板制成,用于遮挡激光器29工作时产生的光线,防止激光光线对操作人员造成伤害,提高操作人员的使用安全性,对开门组件包括动力单元和两个门扇6,两个门扇6位于型材框架2的前端,且对称连接在动力单元上,由动力单元带动两个门扇6同步开合,动力单元通过顶板7安装在型材框架2的顶端,动力单元包括第一电机8、两个滑轨9和两个齿条10,第一电机8通过安装座11连接在顶板7上,第一电机8的输出轴上固定安装有齿轮12,两个滑轨9安装在顶板7上,且分别位于第一电机8的两侧,两个齿条10分别滑动连接在两个滑轨9上,且均与齿轮12相啮合,两个门扇6分别与两个齿条10相连接,第一电机8带动齿轮12转动,通过齿轮12与齿条10的啮合,带动两个齿条10沿滑轨9滑动,从而带动两个门扇6实现开合的动作,在底座1的内部安装有焊烟净化器31,用于收集净化激光器29清洗时产生的烟尘,焊烟净化器31配有至少一根柔性吸气管,此处以两根柔性吸气管为例,两根柔性吸气管均向上延伸至工作位,当激光器29工作产生烟尘时,通过柔性吸气管将烟尘吸收至焊烟净化器31内,起到保护环境,保护操作人员身体健康的目的,净化效率高。
27.采用上述结构,利用型材钢板加工而成的底座1,整体结构强度高,使用稳定性强,利用型材框架2、安装在型材框架2上的侧护板3、后护板4和前护板5以及对开门组件组成一个封闭的空间,在对工件进行激光清洗时,整体在封闭的空间内进行,深色亚克力板可隔绝激光光线,安全性高,不会对操作人员造成伤害,通过焊烟净化器31对烟尘的吸收,避免了环境的污染,利用相互啮合的齿轮12和齿条10,带动齿条10在滑轨9上的滑动,实现门扇6的自动开合,结构简单,控制方便。
28.参照图6,移动组件包括气缸13、移动底板14和两个第一直线导轨15,气缸13固定端安装在底座1上,气缸13伸出端可拆卸连接在移动底板14上,两个第一直线导轨15对称安装在气缸13的两侧,移动底板14在气缸13的带动下可沿两个第一直线导轨15滑动,利用气缸13带动移动底板14沿第一直线导轨15移动,从而带动安装在移动底板14上的定位组件在上料位和工作位之间移动切换,方便工件的上料和清洗作业。
29.参照图7-图10,驱动定位单元包括电机支架16、第二电机17、旋转轴承座18和旋转定位轴19,电机支架16安装在移动底板14的一端,第二电机17和旋转轴承座18分别安装在电机支架16的两侧,旋转轴承座18内安装有若干个轴承34,旋转定位轴19的一端穿过若干
轴承34插入旋转轴承座18内,且与第二电机17输出轴连接,由第二电机17带动旋转定位轴19转动,从而可带动被夹持的工件转动,实现对工件表面激光清洗除锈作业,旋转定位轴19在远离旋转轴承座18一端的端面上安装有第一隔垫32,移动夹持单元包括电机丝杠滑轨模组20和浮动定位单元,电机丝杠滑轨模组20通过横移底板21安装在移动底板14的另一端,浮动定位单元通过定位底板36安装在电机丝杠滑轨模组20上,随电机丝杠滑轨模组20移动,电机丝杠滑轨模组20为现有技术的应用,此处不再赘述,浮动定位单元包括定位座22、定位杆23和定位盘24,定位座22安装在定位底板36上,定位盘24与定位杆23一端焊接成一体,定位杆23另一端穿透连接在定位座22内,定位座22内在定位杆23穿过的位置处安装有铜套35,利用铜套35提高定位杆23转动及滑动的灵活性,在定位杆23上套装有弹簧25,弹簧25位于定位座22和定位盘24之间,定位盘24端面安装有第二隔垫33,第一隔垫32和第二隔垫33均采用或聚氨酯或尼龙材质制成。
30.采用上述结构,利用电机丝杠滑轨模组20带动浮动定位单元移动,可满足对不同长度工件的夹持要求,利用套装在定位杆23上的弹簧25实现对工件的浮动夹紧,防止夹持过程中刚性接触对工件表面造成损坏,可转动的定位杆23可使得被夹持的工件在驱动定位单元的带动下旋转,软性材料制成的第一隔垫32和第二隔垫33,可防止在夹持工件时对工件表面造成损害。
31.参照图11,三轴机械臂包括x轴模组26、y轴模组27和z轴模组28,x轴模组26通过若干支座30安装在底座1上,y轴模组27与x轴模组26传动连接,z轴模组28与y轴模组27传动连接,激光器29安装在z轴模组28上。
32.采用上述结构,利用x轴模组26、y轴模组27和z轴模组28可带动激光器29实现位置的调整,带动激光器29进行激光清洗作业,并可使激光器29满足较大范围的工作要求,激光器29可以在三维空间内移动,移动范围大,适用范围广,工作效率高,使用方便。
33.使用时,启动第一电机8将两个门扇6打开,气缸13伸出,带动定位组件运动到底座1前端的上料位,操作人员拿取待清洗工件,将工件的一端靠紧在第一隔垫32上,启动电机丝杠滑轨模组20,带动夹紧定位单元靠近工件的另一端,压缩弹簧25,当弹簧25弹力平衡后,实现对工件的夹紧,控制气缸13缩回,将工件带动至工作位,第一电机8带动两个门扇6关闭,启动第二电机17和三轴机械臂,第二电机17带动工件旋转,激光器29对工件进行激光清洗,启动焊烟净化器31,将清洗过程中产生的烟尘通过两个柔性吸气管吸收至焊烟净化器31内净化,防止对环境造成污染,清洗完成,气缸13伸出,第一电机8将门扇6打开,操作人员将清洗完成的工件取下,循环往复。
34.需要特别说明的是,在本发明的实施例中所述的第一电机8、滑轨9、齿条10、齿轮12、气缸13、第一直线导轨15、第二电机17、电机丝杠滑轨模组20、弹簧25、x轴模组26、y轴模组27、z轴模组28、激光器29、焊烟净化器31、柔性吸气管、轴承34、铜套35、可调地脚和螺栓为现有技术应用。
35.在本专利的描述中,需要理解的是,术语“上”、“下”、“内”、“外”、“中心”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本专利和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本专利的限制。
36.在本专利中,除非另有明确的规定和限定,术语“组合”、“设置”、“连接”、“固定”、“紧密”等术语应做广义理解,例如,可以是固定连接,也可以是可拆卸连接,或成一体;可以是机械连接,也可以是电连接;可以是直接相连,也可以通过中间媒介间接相连,可以是两个元件内部的连通或两个元件的相互作用关系,除非另有明确的限定,对于本领域的普通技术人员而言,可以根据具体情况理解上述术语在本专利中的具体含义。
37.以上所述,仅为本发明较佳的具体实施方式,但本发明的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本发明揭露的技术范围内,根据本发明的技术方案及其发明构思加以等同替换或改变,都应涵盖在本发明的保护范围之内。
38.此外,应当理解,虽然本说明书按照实施方式加以描述,但并非每个实施方式仅包含一个独立的技术方案,说明书的这种叙述方式仅仅是为清楚起见,本领域技术人员应当将说明书作为一个整体,各实施例中的技术方案也可以经适当组合,形成本领域技术人员可以理解的其他实施方式。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。