1.本发明涉及一种离心设备,尤其涉及一种检验科用血液高速离心设备。
背景技术:
2.检验科是属于医学的一门科室,是指将采集到的患者血液进行检验以及动物等标本的检测的工作,目前,在对血液进行检测时,需要对血液进行中的物质进行分离,血液分离一般是通过离心机来实现的,通过离心的原理使得血液中的物质进行分离,血液分离完后,可分为血清、白细胞以及红细胞,人们可根据需求抽取各层,现有的离心设备操作较为繁琐,结构复杂,使用十分不便,且无法对试管进行夹紧,容易出现试管被甩飞的现象。
3.因此,根据上述出现的情况,市场上需要设计出一种操作方便、结构简单以及市场推广性较好的检验科用血液高速离心设备。
技术实现要素:
4.本发明的目的在于提供一种操作方便、结构简单以及市场推广性较好的检验科用血液高速离心设备,能够解决上述背景技术中提出的现有的离心设备操作较为繁琐,结构复杂,使用十分不便,且无法对试管进行夹紧,容易出现试管被甩飞的现象的缺点。
5.一种检验科用血液高速离心设备,包括:底架和圆筒,圆筒下部两侧均设有两个底架;接触开关,圆筒下侧设有接触开关;减速电机,圆筒顶部安装有减速电机;离心机构,减速电机的输出轴上设有离心机构;定位机构,离心机构上设有定位机构;夹紧机构,离心机构和定位机构之间设有夹紧机构;承重机构,圆筒和减速电机之间设有承重机构。
6.有益地,离心机构包括:转轴,减速电机的输出轴上设有转轴;安装杆,转轴顶部设有安装杆;第一转动板,安装杆下侧设有第一转动板;第一滑杆,第一转动板四侧均间隔滑动式设有两个第一滑杆;盛放盘,同侧的两个第一滑杆之间均设有盛放盘。
7.有益地,定位机构包括:安装架,第一转动板四侧均设有安装架;固定架,安装杆上侧设有固定架,固定架四侧分别与同侧的安装架固定连接;第二滑杆,四个安装架上部均滑动式设有两个第二滑杆;定位环,同侧的两个第二滑杆之间均设有定位环。
8.有益地,夹紧机构包括:
第一电动推杆,安装杆顶部安装有第一电动推杆;第一推块,第一电动推杆的伸缩杆上设有第一推块;第一伸缩杆,第一推块两侧均设有两个第一伸缩杆;异形杆,四个第一伸缩杆外侧均设有异形杆;楔形块,四个异形杆外侧均设有两个楔形块;顶板,八个第二滑杆上均设有顶板,顶板与同侧的楔形块接触;第一弹簧,八个第二滑杆上均绕有第一弹簧,第一弹簧两端分别与定位环和顶板连接;夹块,八个第二滑杆内侧均设有夹块。
9.有益地,承重机构包括:第二转动板,减速电机外壁转动式设有第二转动板;第二伸缩杆,第二转动板两侧均对称设有第二伸缩杆;承重板,四个第二伸缩杆顶部均设有承重板;第二弹簧,四个第二伸缩杆上均绕有第二弹簧,第二弹簧两端分别与第二转动板和承重板连接;压力传感器,一侧的承重板顶部内侧设有压力传感器。
10.有益地,还包括有复位机构,复位机构包括:第二电动推杆,圆筒内部下侧安装有第二电动推杆;推动杆,第二电动推杆的伸缩杆上设有推动杆;滑槽,推动杆顶部两侧均设有两个滑槽;第三滑杆,四个滑槽上侧均滑动式设有第三滑杆;第二推块,四个第三滑杆内侧均设有第二推块,第二推块与盛放盘配合;支撑架,圆筒四侧均间隔设有两个支撑架;u型磁铁,八个支撑架顶部均设有u型磁铁,u型磁铁与第一转动板接触;第四滑杆,八个u型磁铁内部均滑动式设有第四滑杆,第二推块与同侧的第四滑杆两个固定连接,第四滑杆与第一转动板配合;距离传感器,圆筒内部上侧设有距离传感器。
11.有益地,还包括有固定机构,固定机构包括:吸盘,四个底架外侧底部均设有吸盘;固定块,圆筒上设有固定块;气泵,固定块和一侧的底架内侧顶部之间设有气泵;管道,气泵和四个吸盘之间连接有管道。
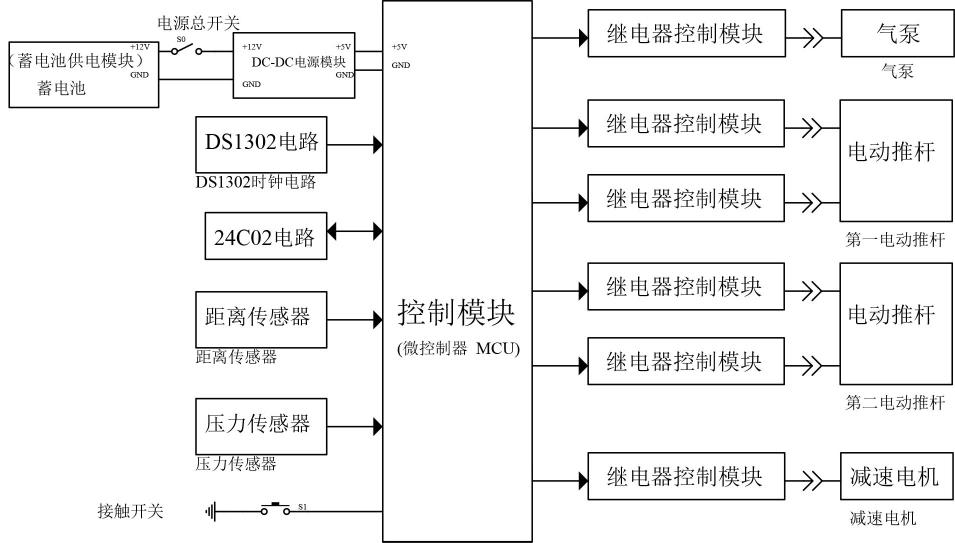
12.有益地,还包括有控制箱,圆筒上部安装有控制箱,控制箱内安装有蓄电池、控制模块和电源模块,蓄电池为整个离心设备供电,蓄电池的输出端与电源模块通过电性连接,电源模块上通过线路连接有电源总开关,控制模块和电源模块通过电性连接;控制模块上连接有ds1302时钟电路和24c02电路;距离传感器、压力传感器和接触开关均与控制模块通过电性连接;气泵、第一电动推杆、第二电动推杆和减速电机均与控制模块通过继电器控制模块连接。
13.与现有技术相比,本发明具有如下优点:1、本发明通过试管顺时针转动能将血液
中的物质进行分离,使得血液分为血清、白细胞和红细胞三层,然后人们可根据需求分别提取即可,实现离心的效果;2、通过夹块向内运动可对试管上侧进行夹紧,防止试管在转动时被甩出,实现夹紧的效果;3、通过滑槽向上运动使得第三滑杆、第二推块和第四滑杆均向内运动至最大位置,第四滑杆向内运动能在第一转动板上滑动,第二推块向内运动能自动推动盛放盘,无需人工推动,可节省人力;4、通过启动气泵,气泵启动后,气泵能通过管道将吸盘中的气体吸走,使得吸盘能牢固的吸附在地面上,实现固定的效果。
附图说明
14.图1为本发明的第一视角立体结构示意图。
15.图2为本发明的第二视角立体结构示意图。
16.图3为本发明的离心机构立体结构示意图。
17.图4为本发明的定位机构立体结构示意图。
18.图5为本发明的夹紧机构第一部分立体结构示意图。
19.图6为本发明的夹紧机构第二部分立体结构示意图。
20.图7为本发明的夹紧机构第三部分立体结构示意图。
21.图8为本发明的承重机构第一部分立体结构示意图。
22.图9为本发明的承重机构第二部分立体结构示意图。
23.图10为本发明的复位机构立体结构示意图。
24.图11为本发明的复位机构剖面立体结构示意图。
25.图12为本发明的固定机构立体结构示意图。
26.图13为本发明的固定机构剖面立体结构示意图。
27.图14为本发明的电路框图。
28.图15为本发明的电路原理图。
29.附图标号:1、底架,2、圆筒,3、控制箱,4、接触开关,5、减速电机,6、离心机构,61、转轴,62、安装杆,63、第一转动板,64、盛放盘,65、第一滑杆,7、定位机构,71、安装架,72、固定架,73、定位环,74、第二滑杆,8、夹紧机构,81、第一电动推杆,82、第一推块,83、第一伸缩杆,84、异形杆,85、顶板,86、第一弹簧,87、楔形块,88、夹块,9、承重机构,91、第二转动板,92、第二伸缩杆,93、第二弹簧,94、承重板,95、压力传感器,10、复位机构,101、推动杆,102、滑槽,103、第三滑杆,104、第二推块,105、第四滑杆,106、第二电动推杆,107、距离传感器,108、支撑架,109、u型磁铁,11、固定机构,111、吸盘,112、固定块,113、气泵,114、管道。
具体实施方式
30.本发明中公开的所有特征,或公开的所有方法或过程中的步骤,除了互相排斥的特征和/或步骤以外,均可以用任何方式组合。
31.本发明(包括任何附加权利要求、摘要和附图)中公开的任一特征,除非特别叙述,均可被其他等效或具有类似目的并加以替换。即,除非特别叙述,每个特征只是一系列等效
或类似特征中的一个例子而已。
32.下面将结合本发明实施例中的附图1至图15用新型实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例只是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
33.如图1至图15所示,一种检验科用血液高速离心设备,包括有底架1、圆筒2、接触开关4、减速电机5、离心机构6、定位机构7、夹紧机构8和承重机构9,圆筒2下部前后两侧均设有两个底架1,圆筒2前部下侧设有接触开关4,圆筒2顶部安装有减速电机5,减速电机5的输出轴上设有离心机构6,离心机构6上设有定位机构7,离心机构6和定位机构7之间设有夹紧机构8,圆筒2和减速电机5之间设有承重机构9。
34.离心机构6包括有转轴61、安装杆62、第一转动板63、盛放盘64和第一滑杆65,减速电机5的输出轴上设有转轴61,转轴61顶部设有安装杆62,安装杆62下侧设有第一转动板63,第一转动板63前后左右四侧均间隔滑动式设有两个第一滑杆65,同侧的两个第一滑杆65之间均设有盛放盘64。
35.定位机构7包括有安装架71、固定架72、定位环73和第二滑杆74,第一转动板63前后左右四侧均设有安装架71,安装杆62上侧设有固定架72,固定架72前后左右四侧分别与同侧的安装架71固定连接,四个安装架71上部均滑动式设有两个第二滑杆74,同侧的两个第二滑杆74之间均设有定位环73。
36.夹紧机构8包括有第一电动推杆81、第一推块82、第一伸缩杆83、异形杆84、顶板85、第一弹簧86、楔形块87和夹块88,安装杆62顶部安装有第一电动推杆81,第一电动推杆81的伸缩杆上设有第一推块82,第一推块82前后两侧均设有两个第一伸缩杆83,四个第一伸缩杆83外侧均设有异形杆84,四个异形杆84外侧均设有两个楔形块87,八个第二滑杆74上均设有顶板85,顶板85与同侧的楔形块87接触,八个第二滑杆74上均绕有第一弹簧86,第一弹簧86两端分别与定位环73和顶板85连接,八个第二滑杆74内侧均设有夹块88。
37.当压力传感器95检测到压力值达到控制模块中的预设值时,控制模块控制第一电动推杆81的伸缩杆伸长至最大位置,同时,控制模块也控制气泵113启动,气泵113启动后,气泵113能通过管道114将吸盘111中的气体吸走,使得吸盘111能牢固的吸附在地面上,实现固定的效果,当人们短按接触开关4,控制模块控制减速电机5的输出轴停止工作的同时,控制模块也控制气泵113关闭,使得吸盘111不能吸住地面。
38.承重机构9包括有第二转动板91、第二伸缩杆92、第二弹簧93、承重板94和压力传感器95,减速电机5外壁转动式设有第二转动板91,第二转动板91前后两侧均左右对称设有第二伸缩杆92,四个第二伸缩杆92顶部均设有承重板94,四个第二伸缩杆92上均绕有第二弹簧93,第二弹簧93两端分别与第二转动板91和承重板94连接,右后侧的承重板94顶部内侧设有压力传感器95。
39.还包括有复位机构10,复位机构10包括有推动杆101、滑槽102、第三滑杆103、第二推块104、第四滑杆105、第二电动推杆106、距离传感器107、支撑架108和u型磁铁109,圆筒2内部下侧安装有第二电动推杆106,第二电动推杆106的伸缩杆上设有推动杆101,推动杆101顶部前后两侧均设有两个滑槽102,四个滑槽102上侧均滑动式设有第三滑杆103,四个第三滑杆103内侧均设有第二推块104,第二推块104与盛放盘64配合,圆筒2前后左右四侧
均间隔设有两个支撑架108,八个支撑架108顶部均设有u型磁铁109,u型磁铁109与第一转动板63接触,八个u型磁铁109内部均滑动式设有第四滑杆105,第二推块104与同侧的第四滑杆105两个固定连接,第四滑杆105与第一转动板63配合,圆筒2内部上侧设有距离传感器107。
40.还包括有固定机构11,固定机构11包括有吸盘111、固定块112、气泵113和管道114,四个底架1外侧底部均设有吸盘111,圆筒2右前侧设有固定块112,固定块112和右前侧的底架1内侧顶部之间设有气泵113,气泵113和四个吸盘111之间连接有管道114。
41.还包括有控制箱3,圆筒2前侧上部安装有控制箱3,控制箱3内安装有蓄电池、控制模块和电源模块,蓄电池为整个离心设备供电,蓄电池的输出端与电源模块通过电性连接,电源模块上通过线路连接有电源总开关,控制模块和电源模块通过电性连接;控制模块上连接有ds1302时钟电路和24c02电路;距离传感器107、压力传感器95和接触开关4均与控制模块通过电性连接;气泵113、第一电动推杆81、第二电动推杆106和减速电机5均与控制模块通过继电器控制模块连接。
42.当人们需要对血液离心操作时,可使用这种检验科用血液高速离心设备,首先人们需要按下电源总开关,为本设备上电,随后将装有血液的试管放在离心机构6上,由于试管的重量使得承重机构9部件运转,控制模块先控制夹紧机构8运转,能将试管夹住,再控制离心机构6运转,从而带动定位机构7、夹紧机构8和试管均运转,可对试管进行离心,使得试管中的血液物质能分离开,方便人们抽取血液中不同的物质,六分钟后,人们可短按接触开关4,控制模块控制离心机构6停止运转,从而带动定位机构7停止运转,随后控制模块控制夹紧机构8反向运转,不能对试管进行夹紧,人们可将试管取出,使得承重机构9部件反向运转,然后人们再次按下电源总开关,为本设备断电即可。
43.当人们将试管放入盛放盘64上后,由于试管的重量使得盛放盘64向下运动,从而带动第一滑杆65、承重板94和压力传感器95均向下运动,第二伸缩杆92被缩短,第二弹簧93被压缩,当压力传感器95检测到压力值达到控制模块中的预设值时,控制模块先控制第一电动推杆81的伸缩杆伸长至最大位置,从而带动第一推块82、第一伸缩杆83、异形杆84和楔形块87均向上运动至最大位置,当楔形块87向上运动时,楔形块87挤压顶板85向内运动,第一弹簧86被压缩,从而带动第二滑杆74和夹块88均向内运动,夹块88向内运动可对试管上侧进行夹紧,防止试管在转动时被甩出,实现夹紧的效果,当第一电动推杆81的伸缩杆伸长至最大位置后,控制模块控制第一电动推杆81的伸缩杆停止工作,同时,控制模块控制减速电机5的输出轴顺时针转动,从而带动转轴61、安装杆62、第一转动板63、盛放盘64和第一滑杆65均顺时针转动,进而带动试管、定位机构7、夹紧机构8和承重机构9均顺时针转动,由于转动的速度较快,使得第一滑杆65向外运动,从而带动盛放盘64和试管均向外运动,进而带动夹块88、定位环73、第二滑杆74、第一弹簧86、顶板85、异形杆84和楔形块87均向外运动,使得第一伸缩杆83伸长,试管顺时针转动能将血液中的物质进行分离,使得血液分为血清、白细胞和红细胞三层,然后人们可根据需求分别提取即可,实现离心的效果,六分钟后,人们可短按接触开关4,控制模块控制减速电机5的输出轴停止工作,随后人们推动盛放盘64向内运动,从而带动试管和第一滑杆65均向内运动,进而带动定位环73、第二滑杆74、异形杆84、顶板85、第一弹簧86、楔形块87和夹块88均向内运动,第一伸缩杆83复位,控制模块延时五秒后控制第一电动推杆81的伸缩杆缩短至最小位置,从而带动第一推块82、第一伸缩
杆83、异形杆84和楔形块87均向下运动至最小位置,由于失去楔形块87的挤压以及第一弹簧86复位使得顶板85向外运动,从而带动第二滑杆74和夹块88均向外运动,使得夹块88不能夹紧试管,当第一电动推杆81的伸缩杆缩短至最小位置后,控制模块控制第一电动推杆81的伸缩杆停止工作,此时人们可将试管取出,当人们将试管取出后,由于第二弹簧93复位带动第二伸缩杆92复位,从而带动承重板94和压力传感器95均向上运动复位。
44.当第一转动板63停止转动时,u型磁铁109能将第一转动板63吸住,将第一转动板63摆正,随后人们可长按接触开关4,控制模块控制第二电动推杆106的伸缩杆伸长至最大位置,从而带动推动杆101和滑槽102均向上运动至最大位置,滑槽102向上运动使得第三滑杆103、第二推块104和第四滑杆105均向内运动至最大位置,第四滑杆105向内运动能在第一转动板63上滑动,第二推块104向内运动能自动推动盛放盘64,无需人工推动,可节省人力,当推动杆101向上运动至最大位置时,距离传感器107与推动杆101之间的距离达到控制模块中的预设值时,控制模块控制第二电动推杆106的伸缩杆缩短至最小位置,从而带动推动杆101和滑槽102均向下运动至最小位置,滑槽102向下运动使得第三滑杆103、第二推块104和第四滑杆105均向外运动至最小位置,第四滑杆105向外运动使得不与第一转动板63接触,当第二电动推杆106的伸缩杆缩短至最小位置后,控制模块控制第二电动推杆106的伸缩杆停止工作。
45.上述实施例,只是本发明的较佳实施例,并非用来限制本发明实施范围,故凡以本发明权利要求所述内容所做的等效变化,均应包括在本发明权利要求范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。
