1.本发明属于医疗器械领域,具体涉及一种电磁驱动的无创自动延长假体。
背景技术:
2.目前,中国每年原发性骨肉瘤病例超过一万例,其中大多数患者的年龄不超过三十岁,手术主要通过切除病变骨骼并植入人工假体来完成。对于青少年来说,这类患者在术后,骨骼依然具有很强的生长力,传统的金属假体需要定期进行手术进行延长与翻修,大大提高了风险与难度,影响患者的日常生活与恢复,因此可延长假体成为一种合理的选择。
3.可延长假体大致可以分为组合型假体、微创可延长假体和无创可延长假体三种类型。无创可延长假体于29世纪70年代末、80年代初问世,其最大的特点在于植入体内后肢体的延长无需进行有创手术,从而减少手术感染风险和并发症发生率,降低了患者的心理负担和经济负担。目前,无创可延长假体在发达国家已经取代其他可延长假体广泛使用,国外现有产品主要有德国的fitbone和美国的repiphysis,国内相关产品尚处于起步阶段。当前对无创可延长假体的设计主要为电机驱动,本发明采用的电磁驱动方式,将控制单元置于体外,体内假体的器件结构相对简单,在使用过程中更加稳定可靠,减小了因机械故障导致的风险。
技术实现要素:
4.鉴于背景技术提到的问题,本发明的目的在于提供一种能够在体外控制的自动可延长假体。
5.为实现上述目的,本发明采用如下技术方案:
6.一种电磁驱动的可延长假体,包括可延长假体本体和体外电磁驱动器,所述可延长假体本体包括固定髓针、密封外壳、移动体、旋转体、传动主轴、环形永磁体,所述固定髓针为两个,分别位于假体的两端,其中一个固定髓针固定于密封外壳的一端,另一个固定髓针固定于移动体的一端;所述环形永磁体位于密封外壳内,固定套接在所述传动主轴外;转动主轴的一端与旋转体相配合,用于带动旋转体旋转,另一端设有轴承,所述轴承固定在密封壳体上,用于支撑传动主轴;所述旋转体与移动体通过丝杠方式连接,在所述旋转体外周具有旋转防退装置,在旋转体靠近传动主轴的一端设有限位环,用于限制旋转体的轴向移动;所述移动体具有固定髓针的一端位于密封外壳外,另一端位于密封外壳内,所述密封外壳具有防旋转限位器,用于限制移动体周向旋转;所述体外电磁驱动器与所述可延长假体本体相配合,用于驱动环形永磁体旋转。
7.进一步地,所述体外电磁驱动器包括至少两对线圈模块和连接线圈模块的柔性连接带。优选地,所述柔性连接带具有弹性。
8.进一步地,所述线圈模块包括通电线圈、霍尔元件,所述体外电磁驱动器还包括控制模块,所述控制模块控制通电线圈对的通电时长及顺序,所述霍尔元件原件用于检测磁场的变化,准确计数线圈模块的通电循环得到永磁体旋转圈数,控制模块根据旋转体的螺
距和旋转圈数得到假体的伸长量,当伸长量达到预定伸长量时,停止对线圈模块通电。
9.进一步地,所述控制模块控制处于对侧的两个线圈模块通电产生磁场,吸引假体内部环形永磁体的对应磁极,该磁极到位后,下一对对侧线圈模块通电产生磁场,永磁体继续向前转动,如此循环往复,驱动环形永磁体以恒定的角速度驱动旋转体旋转。
10.进一步地,所述传动主轴与旋转体过盈配合。
11.进一步地,所述轴承为滚珠推力轴承。
12.进一步地,所述旋转防退装置为棘轮防退装置,所述棘轮防退装置在正确的旋转方向上存在一定的阻尼。
13.进一步地,所述防旋转限位器为凸台结构。
14.进一步地,所述密封外壳上具有两圈向内的平行环形凸起形成容纳所述限位环的环形凹槽,所述限位环被所述环形凹槽固定。
15.本发明由于采取上述结构,具有如下有点:
16.1.内置环形永磁体具有多个磁极,通过体外电磁场控制时转速更加稳定;
17.2.可自动延长的假体设计了防旋转(防旋转凸台)和防倒退(棘轮防退)的装置,棘轮防退装置还保证了在正确的旋转方向上依然存在一定的阻尼,保证了患者在日常运动时,不会因环形永磁体的自然旋转导致假体的不必要增长;
18.3.体外电磁驱动控制器通过柔性材料连接,可伸缩并改变直径大小,适用于不同粗细的肢体;
19.4.体外电磁驱动控制器内装有霍尔元件,准确定位内置磁场位置,测量旋转圈数;
20.5.使用滚珠推力轴承,减小摩擦损耗;
21.6.控制体外磁场的旋转速度,启动逐渐加快,中间匀速,即将到达设定长度时逐渐减小速度,直至停止,从而准确控制延长长度(旋转圈数)。
附图说明
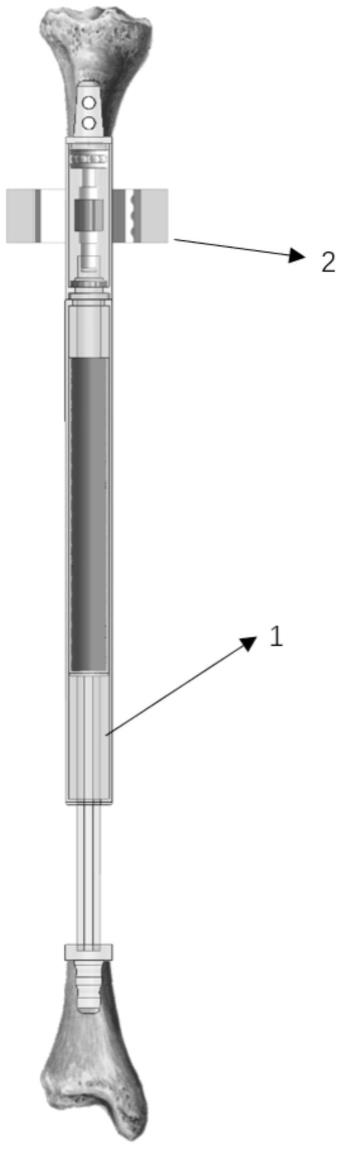
22.图1是本发明的装置总体结构示意图;
23.图2是可延长假体剖面图;
24.图3是传动主轴连接处局部放大;
25.图4是体外电磁驱动控制器示意图;
26.图5是控制前线圈模块的内部结构示意图;
27.图中,
28.1.可延长假体
29.101.顶部固定髓针,102.密封外壳,103.移动体,104.旋转体,105.限位环,106.传动主轴,107.环形永磁体,108.推力轴承,109.棘轮防退装置,110.底部固定髓针;
30.2.体外电磁驱动控制器
31.201.线圈模块,202.柔性连接带,203.通电线圈,204.霍尔元件。
具体实施方式
32.下面结合附图对本发明作进一步的详细说明,但不应理解为对本发明的限制。在不背离本发明精神和实质的情况下,对本发明的修改或润饰,均属于本发明的范围。
33.如图1和2所示所述的一种通过电磁驱动的自动可延长假体包括可延长假体部分1和体外电磁驱动控制器2。
34.假体1主要由两端的固定髓针101/110、密封外壳102、移动体103、旋转体104、限位环105、传动主轴106、环形永磁体107、棘轮防退装置109、滚珠推力轴承108等组成。环形永磁体107与传动主轴106固连,并利用凹槽与旋转体104过盈配合,移动体103和旋转体104通过丝杠连接,实现转动与直线运动的转化;两端密封外壳的限位环105,限制旋转体104的轴系自由度,密封外壳一端的凸台结构限制移动体103的周向转动;棘轮防退装置109保证旋转只发生在可以使移动体向上伸长的方向,防止倒退并保证了在正确的旋转方向上依然存在一定的阻尼;底部的滚珠推力轴承108,在高轴向承载的情况下使得主轴能够保持顺畅的旋转。
35.体外电磁驱动控制器2由线圈模块201、柔性连接带组成202。线圈模块201内部有通电线圈203与霍尔元件204。霍尔元件204位于模块内侧,可以检测环形永磁体106旋转产生的磁场变化,从而起到定位和测速的作用。柔性连接带202由柔性材料制成,具有一定的弹性,具有伸缩与固定的功能,每段连接结构由3根组成,在保持各个线圈模块相对位置不变的基础上确保连接稳定性。
36.实施例1
37.如图1所示,本发明提供一种通过电磁驱动的自动可延长假体,包括可延长假体部分1和体外电磁驱动控制器2。
38.如图2、3所示,可延长假体由两端的固定髓针101/110、密封外壳102、移动体103、旋转体104、限位环105、传动主轴106、环形永磁体107、棘轮防退装置109、滚珠推力轴承108等组成。固定髓针101/110插入关节或骨头里,利用钢钉进行固定。密封外壳102用于隔绝假体内部空腔与人体组织,防止器械失效。环形永磁体107为可自动延长假体的推进装置,输出轴向的旋转,通过外部可控的交变磁场,以合适的转速进行旋转,并将合适速度的转动传递给旋转体104,带动旋转体104旋转。旋转体104和移动体103通过丝杠连接,因此在旋转体104旋转的同时将带动移动体103的轴向移动,从而达到伸长的效果。传动主轴106利用凹槽与旋转体103过盈配合。
39.在密封外壳102与固定髓针101的接触连接部分,采用了防旋转凸台,可以防止移动体随旋转体旋转而导致装置失效。另外,在传动部分采用了棘轮防退109,可以保证旋转只发生在可以使移动体向上伸长的方向,防止倒退。同时,棘轮防退装置109还保证了在正确的旋转方向上依然存在一定的阻尼,保证了患者在日常运动时,不会因环形永磁体107的自然旋转导致假体的不必要增长。限位环105在装配时被两段密封外壳102凸起部分固定,使得旋转体104只存在旋转这一唯一自由度,而不会发生轴向的位移,进一步增强假体使用的承载能力与稳定性。
40.本例中防旋转凸台的结构还可以是防旋转凹槽,也即密封外壳102的一端与移动体103之间通过凸台和凹槽的结构相配合,使移动体103沿着轴向方向延伸而不会发生周向旋转。
41.传动装置底部选用iso标准滚珠推力轴承108,在高轴向承载的情况下使得主轴能够保持顺畅的旋转。
42.如图4所示,体外电磁驱动控制器2由线圈模块201、柔性连接带202组成。柔性连接
带202由柔性材料制成,具有一定的弹性,具有伸缩与固定的功能,每段连接结构由3根组成,在保持各个线圈模块相对位置不变的基础上确保连接稳定性。
43.线圈模块201的剖面图如图5所示,由通电线圈203、霍尔元件204组成。体外电磁驱动控制器工作时,处于对侧的两个线圈模块203通电产生磁场,吸引假体内部环形永磁体107的对应磁极,该磁极到位后,下一对对侧线圈模块203通电产生磁场,永磁体继续向前转动,如此循环往复,驱动环形永磁体107以恒定的角速度驱动旋转体104。霍尔元件204时刻检测磁场的变化,准确计数线圈模组的通电循环,检测假体的伸长量。
44.患者穿戴体外电磁驱动控制器时,将控制器套在环形永磁体107对应躯体部分外侧,利用连接结构202的伸缩性固定,使得各个线圈模块的相对位置保持不变,确保电磁驱动的稳定性。
45.体外电磁驱动控制器2受计算机控制,通过预设的伸长长度,计算所需要的通电循环次数,根据螺距、伸长速度等参数确定通电循环频率,并且在即将达到预设长度时提前减速,便于精准控制结束时间与位置,避免因传动系统的惯性超出预设的伸长长度。
46.实施例2
47.本例中的电磁驱动的可延长假体与实施1的结构基本相同,但所述线圈模块201包括通电线圈203、霍尔元件204,所述体外电磁控制驱动器2还包括控制模块,所述控制模块控制通电线圈对的通电时长及顺序,所述霍尔元件原件204用于检测磁场的变化,准确计数线圈模块的通电循环得到永磁体旋转圈数,控制模块根据旋转体104的螺距和旋转圈数得到假体的伸长量,当伸长量达到预定伸长量时,停止对线圈模块通电。所述体外电磁控制驱动器2还进一步包括显示和输入模块,显示模块可以显示可延长假体的各种参数,例如患者的信息,可延长假体的初始信息、伸长次数、伸长量等等各种信息,通过输入模块可以设置伸长长度,控制模块计算所需要的通电循环次数,根据旋转体104的螺距、伸长速度等参数确定通电循环频率,并且在即将达到预设长度时提前减速,便于精准控制结束时间与位置,避免因传动系统的惯性超出预设的伸长长度。例如控制体外磁场的旋转速度,启动逐渐加快,中间匀速,即将到达设定长度时逐渐减小速度,直至停止,从而准确控制延长长度(旋转圈数)。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。