1.本发明涉及一种可调节振子阵列的流致振动海流能发电装置。
背景技术:
2.为缓解能源危机和环境污染问题,可再生清洁能源的开发利用变得尤为重要。在诸多可再生能源中,海洋面积辽阔储能丰富,成为未来可再生能源利用的研究焦点。其中由于海流能储备丰富,是目前水下能源利用的热点话题。而现有海底发电站一般选用水下涡轮机发电,利用水力推动涡轮转动进行发电。选用水下涡轮机发电,无法将轮叶做的像风力发电的风机叶片一样大,且海的深度有限,随着涨落潮深度是可变的,如果需要最大的获得水的能量只能选择增大装备扇面并为其增加聚水罩、过滤网等装置,不仅制备成本高且设备复杂,后期存在维护不便等问题。且由于现有的水下涡轮机启动流速至少为2m/s,而一般海洋平均流速达不到水下涡轮机的启动流速。
3.流致振动现象广泛的存在于空气动力、水动力及海洋动力等相关的工程领域中,其对工程结构物有巨大的破坏作用。但如果能将该振动能量有效地转化为电能,一方面可以对能源进行利用,另一方面振动能量被搜集起来,对结构整体起到减振效果。基于流致振动原理的低流速海流能发电技术是一项较新的发电技术,其不需要高的启动流速,利用柱体流致振动获取周围水域的水流动能,进而转化为电能或其他形式的可利用能源。
技术实现要素:
4.发明目的:本发明目的是提供一种可调节振子阵列的流致振动海流能发电装置,该发电装置能够自行调节振子的深度和相邻振子的间距,从而在不同海况下均能获得较高的能量。
5.技术方案:本发明所述的可调节振子阵列的流致振动海流能发电装置,包括安装板、固定在安装板上多个相互平行设置的轨道以及安装在轨道内多个等距排布的底座;每个底座上均安装有转盘盘面,转盘盘面上设有直线式发电机、振子装置以及驱动振子装置沿纵向移动的升降机构;所述底座内设有动力机构和转动机构,底座在动力机构的驱动下沿着轨道前后移动,所述底座前后侧壁上均设有激光测距仪i;底座上转盘盘面在转动机构驱动下相对底座转动;所述振子装置包括振子,振子与直线式发电机的动子固定连接,振子上还设有流速仪和角度检测传感器,角度检测传感器用来监测来流方向与振子轴线之间的夹角。
6.其中,所述振子装置在安装板上呈矩阵式排布。
7.其中,振子由铝合金制备而成。
8.其中,所述动力机构包括电机、一号传动轴、二号传动轴和三号传动轴;一号传动轴和三号传动轴对称布置在底座底部;一号传动轴和三号传动轴通过二号传动轴传动连接;一号传动轴和三号传动轴两个端部均通过防水轴承与底座转动连接并穿出底座向外伸出,一号传动轴和三号传动轴的两个端部均设有轮子;驱动电机的驱动端与一号齿轮固定
连接,二号齿轮固定在一号传动轴上,一号齿轮与二号齿轮相互啮合;一号传动轴端部套设有一号直齿伞、二号传动轴两个端部均套设有二号直齿伞,三号传动轴端部套设有三号直齿伞,一号直齿伞与二号传动轴其中一端的二号直齿伞相互啮合,二号传动轴另一端的二号直齿伞与三号直齿伞相互啮合。电机转动,带动一号传动轴转动,一号传动轴转动,通过相互啮合的一号直齿伞与二号直齿伞带动二号传动轴转动,再通过相互啮合的二号直齿伞与三号直齿伞带动三号传动轴转动。
9.其中,所述轨道包括箱体以及位于箱体内的导轨,导轨对称设置在箱体的上顶板和下底板上,箱体侧壁上设有线性开口,底座上的轮子沿着导轨在箱体中前后移动。
10.其中,所述转动机构包括转盘底座、固定在转盘底座的转轴、通过轴承与转轴固定连接的齿轮、与齿轮相互配合连接的齿条以及驱动齿条前后伸缩运动的气缸;电机固定在转盘底座的下表面;所述转动机构还包括与齿轮固定连接的转盘,转盘盘面固定在转盘上,转盘上表面开有十字凹槽用以固定转盘盘面;转盘下表面设有一圈定位孔(定位孔呈环形设置在转盘下表面);所述转动机构还包括固定在转轴上的定位机构以及设置在定位机构侧边且固定在转盘底座上表面的接近开关,定位机构为两端同时顶升的气缸,转动到位后,定位机构顶升,上端的定位销嵌入转盘下表面的定位孔中。
11.其中,所述转动机构还包括固定在转盘底座上的外壳,气缸通过固定架固定在外壳上。
12.其中,所述振子装置还包括相对设置的支撑杆以及设置在支撑杆上的弹簧,支撑杆上设有线性导轨,振子两端分别连有滑块,滑块与线性导轨相互配合连接,在海流能驱动下,振子通过滑块沿着线性导轨上下移动;弹簧一端固定在支撑杆顶部,弹簧另一端与振子连接。支撑杆顶部还设有激光测距仪ii,激光测距仪ii用来测量支撑杆顶端至转盘盘面的垂直距离。
13.其中,所述升降机构包括固定在转盘盘面上的液压油缸,液压油缸的固定端固定在转盘盘面上,液压油缸的驱动端与支撑杆底部固定连接。
14.其中,所述升降机构包括箱体以及固定在箱体内的液压升降装置,液压升降装置包括剪叉式支架以及驱动剪叉式支架向上或向下运动的液压油缸;剪叉式支架下端部一侧与箱体底板铰接,另一侧设有小滚轮,带小滚轮一侧伸入箱体底板的滑轨内,当剪叉式支架向上或向下运动时,小滚轮在滑轨内作向前或向后滑动;剪叉式支架上端部一侧与箱盖铰接,另一侧设有小滚轮,带小滚轮端部伸入箱盖下表面的滑轨内,当剪叉式支架向上或向下运动时,小滚轮在滑轨内作向前或向后滑动。
15.其中,本发明发电装置还包括安装在安装板上控制模块,控制模块通过对应轨道中沿来流方向首个振子装置上的流速仪和角度检测传感器采集振子对应液面的流速及来流方向与振子轴线的夹角,每列轨道中,不同流速对应每个振子装置升起高度和相邻振子装置距离不同,通过当前流速驱动每个振子装置的电机同步正转或反转以及驱动每个振子装置的液压油缸同步顶升或回缩,通过激光测距仪i和激光测距仪ii来检测相邻振子装置的距离和振子装置的升起高度,当到达设定距离和高度后,停止对液压油缸和电机的驱动;通过来流方向与振子轴线的角度,驱动每个振子装置的气缸同步顶升或回缩直至来流方向与振子轴线方向垂直时停止。
16.有益效果:相比于现有技术,本发明的显著效果为:(1)本发明发电装置阵列布置,
多个振子装置的间距、深度、与来流方向的夹角可调,面对不同流速流向下的海流,可以最大限度的对海流能进行捕获,叠加使用时有互相增强的效果,从而获得更大的能量; (2)发电装置易于模块化,安装方便,便于维护;振子装置相对独立,单个振子装置出现故障时对其他振子装置的影响较小;且震动周期长,速度较低,对海洋生物的伤害小,海洋生物可在发电设备的阵列中穿行,对生态友好。
附图说明
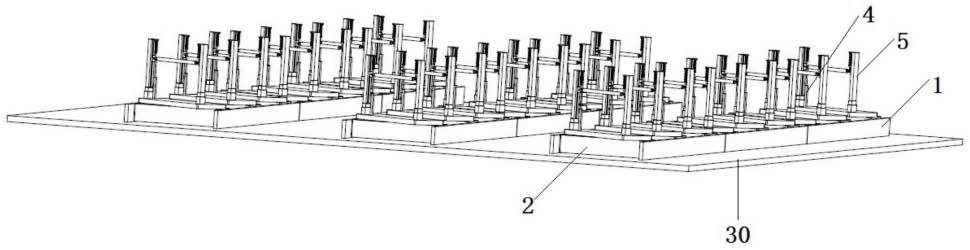
17.图1为本发明发电装置的结构原理图;
18.图2为其中一列轨道中多个底座的排布图;
19.图3为轨道的结构示意图;
20.图4为轮子的结构示意图;
21.图5为振子装置的结构示意图;
22.图6为箱体内液压升降装置的结构示意图;
23.图7为液压油缸头部的连接放大图;
24.图8为底座内部结构示意图;
25.图9为转动机构结构示意图;
26.图10为去除外壳后转动机构内部结构示意图i;
27.图11为去除外壳后转动机构内部结构示意图ii;
28.图12为动力机构的结构示意图;
29.图13为电机与齿轮的连接示意图;
30.图14为来流方向与振子轴线方向相互垂直的示意图。
具体实施方式
31.下面结合具体实施例来对本发明技术方案做进一步说明。
32.如图1~13所示,本发明可调节振子阵列的流致振动海流能发电装置,包括安装板 30、固定在安装板30上多个相互平行设置的轨道1以及安装在轨道1内多个等距排布的底座2;每个底座2上均安装有转盘盘面3,转盘盘面3设有直线式发电机4、振子装置5以及驱动振子装置5沿纵向移动的升降机构;底座2内设有动力机构和转动机构,底座2在动力机构的驱动下沿着轨道1移动,底座2前后侧壁上均设有激光测距仪i,激光测距仪i一方面能够防止相邻底座2之间碰撞,另一方面还能够测得相邻底座2之间的距离;底座2上转盘盘面3在转动机构驱动下相对底座2转动;振子装置5包括振子9,振子9与直线式发电机4的动子41固定连接,振子9上还设有流速仪11和角度检测传感器,振子9呈圆柱体;振子装置5在安装板30上呈矩阵式排布。轨道1插入在海床中,保证装置的稳定性,底座2与转盘盘面3连接处设置有密封条,对底座2内部的装置起到二次密封作用。
33.其中,动力机构包括电机16、一号传动轴13、二号传动轴23和三号传动轴26;一号传动轴13和三号传动轴26对称布置在底座2底部;一号传动轴13和三号传动轴26 通过二号传动轴23传动连接;一号传动轴13和三号传动轴26两个端部均通过防水轴承与底座2转动连接并穿出底座2向外伸出,一号传动轴13和三号传动轴26的两个端部均设有轮子7;驱动电机16的驱动端与一号齿轮20固定连接,二号齿轮15固定在一号传动轴13上,一号齿轮20
与二号齿轮15相互啮合;一号传动轴13端部套设有一号直齿伞18、二号传动轴23两个端部均套设有二号直齿伞19,三号传动轴26端部套设有三号直齿伞25,一号直齿伞18与二号传动轴23其中一端的二号直齿伞19相互啮合,二号传动轴23另一端的二号直齿伞19与三号直齿伞25相互啮合。电机16转动,带动一号传动轴13转动,一号传动轴13转动,通过相互啮合的一号直齿伞18与二号直齿伞19带动二号传动轴23转动,再通过相互啮合的二号直齿伞19与三号直齿伞25带动三号传动轴26转动。
34.一号传动轴13和三号传动轴26前后各1/3处加装一号支架14与二号支架17,二号传动轴13的1/2处设置三支架22,保持传动轴的稳定性,二号传动轴23通过直齿伞啮合时实现二侧一号传动轴13和三号传动轴26的动力连接,各型号齿轮、直齿伞与各轴采用键加强配合的紧密性,实现齿轮、直齿伞与轴的同步运动。电机16通过四个螺栓螺母配合固定在伺服电机安装支架上,电机支架下方四个支撑杆焊接在转盘底座109 下表面,支撑电机16。
35.当振子装置5间距较小时,后方振子装置5的电机16反转,电机16通过二号齿轮 15与一号齿轮20啮合为一号传动轴13提供动力,此时一号传动轴13正转,一号传动轴13旋转的过程中又通过一号直齿伞18与二号直齿伞19啮合控制二号传动轴23顺时针旋转,二号传动轴23旋转的过程中通过另一侧的三号直齿伞24与四号直齿伞25啮合控制控制二号传动轴23另一侧的三号传动轴26同步顺时针转动,实现四个轮子以相同的速度前进,当振子装置5间距合适时,电机16停止工作。
36.当振子装置5间距较大时,后方振子装置5的电机16正转,电机16通过二号齿轮 15与一号齿轮20啮合为一号传动轴13提供动力,此时一号传动轴13反转,一号传动轴13旋转的过程中又通过一号直齿伞18与二号直齿伞19啮合控制二号传动轴23逆时针旋转,二号传动轴23旋转的过程中通过另一侧的三号直齿伞24与四号直齿伞25啮合控制二号传动轴23另一侧的三号传动轴26同步逆时针转动,实现四个轮子以相同的速度后退,当振子装置5间距合适时,电机停止工作。
37.轨道1包括箱体101以及位于箱体101内的导轨102,导轨102对称设置在箱体101 的上顶板和下底板上,箱体101侧壁上设有线性开口103,底座2上的轮子7沿着导轨 102在箱体101中前后移动。轨道1采用封闭式轨道,轮子7嵌入在轨道1内部,轨道 1外部涂有防腐材料,可以有效隔绝海水侵蚀,延长工具使用寿命。
38.转动机构包括转盘底座109、固定在转盘底座109的转轴115、通过轴承与转轴115 固定连接的齿轮107、与齿轮107相互配合连接的齿条108以及驱动齿条108前后伸缩运动的气缸106;气缸活塞杆112直接与齿条108连接,齿条108通过背部活动固定装置110维持自身平衡的同时进行前后往复运动,气缸106通过控制齿条108往复运动幅度调整转盘105的方向,进而提高装置的捕能效率;电机16固定在转盘底座109的下表面;转动机构还包括与齿轮107固定连接的转盘105,转盘105位于齿轮107上方与齿轮107保持同步运动,转盘盘面3固定在转盘105上,转盘105上表面开有十字凹槽用以固定上部转盘盘面3;转盘105下表面设有一圈定位孔;转动机构还包括固定在转轴115上的定位机构113以及设置在定位机构侧边且固定在转盘底座109上表面的接近开关114,定位机构113为两端同时顶升的气缸,转动到位后(即通过角度检测传感器测得振子9与来流方向垂直),定位机构113顶升,上端的定位销111嵌入转盘105下表面的定位孔中。转动机构还包括固定在转盘底座109上的外壳104,气缸106通过固定架固定在外壳104上;外壳104上设置有指示箭头。
39.当海底流方向改变时对转盘105进行调控,带动转盘盘面3旋转,从而带动振子装置5旋转,使得振子9始终在垂直于来流方向做上下往复线性运动,如图14所示。
40.当来流方向与振子轴线方向相互垂直时,装置正常工作不进行旋转,当来流方向与振子轴线方向的夹角小于90
°
时,装置顺时针旋转至振子轴线方向与来流方向垂直,当来流方向与振子轴线方向的夹角大于90
°
时,装置逆时针旋转至振子轴线方向与来流方向垂直。
41.其中,振子装置5还包括相对设置的支撑杆8以及设置在支撑杆8上的弹簧10,支撑杆8上设有线性导轨81,振子9两端分别连有滑块91,滑块91与线性导轨81相互配合连接,在海流能驱动下,振子9通过滑块91沿着线性导轨81上下移动;弹簧10 一端固定在支撑杆8顶端部,弹簧10另一端与振子9连接;支撑杆8顶部还设有激光测距仪ii,激光测距仪ii用来测量支撑杆8顶端至转盘盘面3的垂直距离。直线发电机 4的动子41直接与振子9端部连接,当海流流经振子9,振子9做上下往复线性运动时,直线发电机4的动子41往复运动切割磁感线进而产生电能;流速仪11设置在振子9端部,跟着振子9一起移动,从而判断振子9位置处对应的流速。
42.本发明升降机构可以为固定在转盘盘面3上的液压油缸,液压油缸的固定端固定在转盘盘面3上,液压油缸的驱动端与支撑杆8底部固定连接。
43.本发明升降机构也可以为包括箱体6以及固定在箱体6内的液压升降装置,液压升降装置包括剪叉式支架207以及驱动剪叉式支架207向上或向下运动的液压油缸210;剪叉式支架207下端部一侧与箱体6底板铰接,另一侧设有小滚轮,带小滚轮一侧伸入箱体6底板的滑轨212内,当剪叉式支架207向上或向下运动时,小滚轮在滑轨212内部向前或向后滑动;剪叉式支架207上端部一侧与箱盖铰接,另一侧设有小滚轮213,带小滚轮213端部伸入箱盖下表面的滑轨内,当剪叉式支架207向上或向下运动时,小滚轮在滑轨212内部向前或向后滑动;支撑杆8与箱盖上表面固定连接。箱体6外部框架高度不变,内部框架高度可以自由调节,箱盖与支撑杆8固定连接,箱盖同时与内部液压升降装置固定连接。
44.当振子装置5高度较高时,降低液压油缸210内部压力,缸杆回缩,滑轨212内部小滚轮213向后滑动,带动剪叉式支架207向下运动;此时液压油缸210的活塞与油缸头部连接装置211连接固定绕螺栓转动,连接杆209(为了维持支架运动的稳定性,连接杆209嵌套在两个支架之间并且相邻支架中间设有导柱)连接两侧的剪叉式支架207,保证两侧支架同时降低。
45.当振子装置5高度较低时,升高液压油缸210内部压力,缸杆前伸,滑轨212内部小滚轮213向前滑动,带动剪叉式支架207向上运动;此时液压油缸210的活塞与油缸头部连接装置211连接固定绕螺栓转动;连接杆209连接两侧的剪叉式支架207,保证两侧支架同时升高。
46.本发明发电装置还包括安装在安装板30上控制模块,控制模块通过对应轨道1中沿来流方向首个振子装置5上的流速仪11和角度检测传感器采集振子9对应液面的流速及来流方向与振子9轴线的夹角,每列轨道1中不同流速对应每个振子装置5升起高度和相邻振子装置5距离不同,通过当前流速驱动每个振子装置5的电机16同步正转或反转和每个振子装置5的液压油缸210同步顶升或回缩,通过激光测距仪i和激光测距仪ii82来检测相邻振子装置5的距离和振子装置5的升起高度,当到达对应距离和高度后,停止对液压油缸210
和电机16的驱动;通过来流方向与振子9轴线的角度,驱动每个振子装置5的气缸106同步顶升或回缩直至来流方向与垂直振子方向角度为0
°
时停止。
47.本发明采用直径为0.1m,长度为1m,质量比介于1.1~2.0,阻尼比介于0.03~0.3的振子。由于海流能的能量与流速的平方和流量成正比,通过设置流速仪和角度检测传感器实现检测海流的流速与方向,通过控制模块实现装置的转动,使得振子始终在垂直于来流方向做上下往复线性运动,从而尽可能大的捕获海流能。本装置基于流致振动现象提出,而流致振动现象是指当水流流过固体时,水流与壁面之间的摩擦导致近壁面水流蜷曲成涡,诱发固体表面不同区域压强产生规律的强弱变化,表现出交替相间的流体力,使得固体发生往复运动,往复运动的固体又进一步改变流体的流态,进而改变固体表面交替出现的流体力的现象。所以当水流通过振子表面,振子表面会形成漩涡,部分漩涡会附着在下一个振子表面,使得其表面的流体力受到上一个振子运动的影响,同时其本身在振动过程中受到漩涡的影响反作用于上一个振子,使得振子间的振动波动变大。本发明通过设置驱动振子装置纵向移动的升降机构以及前后移动的动力机构来满足通过调节振子装置的高度以及相邻振子间的间距,使得振子振动过程中脱落的漩涡可以作用在下一个振子表面,从而提高振子间的振动幅度,进而实现捕能功率的提高,这是因为捕能功率与振幅成正比,装置通过调节阵列排布方式来提高振子的振幅,从而提高捕能功率。本发明通过振子方向调整能够充分利用海流能,同时通过阵列排布方式的调整能够提高振子的振动幅度以及频率,从而提高能量转化效率和能量捕获功率。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。