1.本实用新型涉及太阳能电池电镀领域,特别是涉及一种电镀载具的上片装置及电镀设备。
背景技术:
2.太阳能电池的金属化进程中,通常采用电镀沉积的方式进行。在电镀前,需要将太阳能电池准确排布在载具上,以实现良好的导电、电镀效果。
3.发明人在研究上述现有技术的过程中发现,上述现有技术方案存在如下缺点:排布太阳能电池的过程中,效率低、自动化程度低、准确度低。
技术实现要素:
4.本实用新型提供一种电镀载具的上片装置及电镀设备,旨在解决排布太阳能电池的过程中,效率低、自动化程度低、准确度低的问题。
5.本实用新型实施例提供了一种电镀载具的上片装置,包括:机架、用于传送电池片的电池片传送机构、用于传送载具的载具传送机构、至少一个上片机器人、第一拍照机构、控制机构,以及用于获取电池片的位置图像信息的第二拍照机构;
6.所述载具具有与电池片对应的容纳空间;所述电池片的位置图像信息为电池片放置到所述容纳空间之前的位置图像信息;所述第一拍照机构和载具具有容纳空间的一侧相对设置,以获取所述容纳空间的位置图像信息;
7.所述上片机器人具有从所述电池片传送机构上抓取电池片、调整电池片位置、向所述容纳空间放置电池片的抓取调整机构;
8.所述电池片传送机构、所述载具传送机构、所述上片机器人均设置在所述机架上;
9.所述第一拍照机构、所述第二拍照机构、所述抓取调整机构均与所述控制机构相连接。
10.在本实用新型实施例中,第二拍照机构可以获取到电池片放置到载具的容纳空间之前的位置图像信息,第一拍照机构和载具具有的电池片对应的容纳空间的一侧相对设置,可以获取到载具上具有的电池片对应的容纳空间的一侧的位置图像信息。第二拍照机构、第一拍照机构均与控制机构相连接,控制机构可以获取到电池片的位置图像信息和容纳空间的位置图像信息。控制机构还与上片机器人的抓取调整机构相连接,控制机构根据接收的电池片的位置图像信息和容纳空间的位置图像信息对比分析,控制抓取调整机构调整电池片的位置,以更好地适配对应的容纳空间,可以从很大程度上提高在载具上排布电池片的精准度,同时整个过程均通过各个部件配合自动完成,提高了电池排布的效率和自动化水平。
11.可选的,所述电池片传送机构具有与电池片对应的容置位,所述第二拍照机构和所述容置位相对设置;
12.和/或,所述第二拍照机构设置在所述上片机器人上并与所述抓取调整机构相对
设置。
13.可选的,所述第一拍照机构包括至少一个第一摄像头,每个第一摄像头的视野范围均包含载具的全部容纳空间;
14.或,载具上容纳空间的数量为n,所述第一拍照机构包括至少两个第二摄像头,每个第二摄像头的视野范围包含所述载具上m个容纳空间,所有所述第二摄像头对应的视野范围包含所述载具的全部容纳空间;所述n>m≥1。
15.可选的,所述抓取调整机构包括从所述电池片传送机构上抓取电池片的至少一个真空吸附部件,以及对电池片进行xyz三轴调节的微调对位平台;所述微调对位平台与所述控制机构相连接。
16.可选的,所述载具包括至少一个旋转轴;所述旋转轴的轴向与所述载具传送机构的运动方向垂直;所述旋转轴上固定有至少一个活动探针排;所述载具还包括与所述活动探针排相对分布的固定探针排;所述电镀载具的上片装置还包括转动所述旋转轴的至少一个旋转轴开合电机;所述旋转轴旋转至第一角度的情况下,所述活动探针排靠近位置对应的固定探针排以夹持电池片;所述旋转轴旋转至第二角度的情况下,所述活动探针排远离位置对应的固定探针排以卸载电池片。
17.可选的,所述电镀载具的上片装置还包括驱动所述载具传送机构步进的至少一个传输驱动电机;
18.在所述传输驱动电机驱动所述载具传送机构步进至电池片上片位的情况下,位置对应的所述旋转轴开合电机带动所述旋转轴旋转至第二角度,在所述上片机器人向所述活动探针排和所述固定探针排之间放置电池片后,位置对应的所述旋转轴开合电机带动所述旋转轴旋转至第一角度。
19.可选的,所述载具包括多组相对平行设置的旋转轴,所述电镀载具的上片装置包括一个旋转轴开合电机,所述旋转轴开合电机控制所有的所述旋转轴;或,所述载具包括多组相对平行设置的旋转轴,所述电镀载具的上片装置包括多个旋转轴开合电机,每个所述旋转轴开合电机控制一组所述旋转轴。
20.可选的,所述电池片传送机构的第一侧设置有挡板结构,和/或,所述电池片传送机构的第二侧设置有挡板结构;所述第一侧和所述第二侧均与所述电池片传送机构的运动方向垂直。
21.可选的,所述第一拍照机构位于所述载具传送机构远离所述电池片传送机构的一侧。
22.可选的,所述上片机器人位于所述电池片传送机构和所述载具传送机构之间。
23.本实用新型实施例还提供了一种电镀设备,包括任一项前述的电镀载具的上片装置。该电镀设备具有与前述的电镀载具的上片装置相似的有益效果,为了避免重复,此处不再赘述。
附图说明
24.为了更清楚地说明本实用新型实施例的技术方案,下面将对本实用新型实施例的描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本实用新型的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动性的前提下,还可以
根据这些附图获得其他的附图。
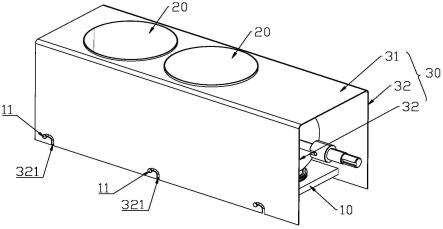
25.图1示出了本实用新型实施例中的一种电镀载具的上片装置的立体结构示意图;
26.图2示出了本实用新型实施例中的一种电镀载具的上片侧视结构示意图。
27.附图标记说明:
28.101-机架,102-电池片传送机构,103-载具,104-载具传送机构,105-上片机器人,106-第一拍照机构,107-第二拍照机构,108-旋转轴开合电机,109-传输驱动电机,110-挡板结构,1031-旋转轴,1051-抓取调整机构。
具体实施方式
29.下面将结合本实用新型实施例中的附图,对本实用新型实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例是本实用新型一部分实施例,而不是全部的实施例。基于本实用新型中的实施例,本领域普通技术人员在没有作出创造性劳动前提下所获得的所有其他实施例,都属于本实用新型保护的范围。
30.图1示出了本实用新型实施例中的一种电镀载具的上片装置的立体结构示意图,图2示出了本实用新型实施例中的一种电镀载具的上片侧视结构示意图。
31.参照图1、图2所示,电镀载具的上片装置包括:机架101、用于传送电池片的电池片传送机构102、用于传送载具103的载具传送机构104、至少一个上片机器人105、第一拍照机构106、控制机构(图1、图2中未示出),以及用于获取电池片的位置图像信息的第二拍照机构107。对电镀载具的上片装置包含的上片机器人105的数量不作具体限定。此处的载具103可以为电镀载具。上述第一拍照机构106、第二拍照机构107可以为摄像头等,本实用新型实施例,对此不作具体限定。上述上片机器人105可以为悬臂机器人等。
32.载具103具有与电池片对应的容纳空间。电池片的位置图像信息为电池片放置到载具传送机构104的容纳空间之前的位置图像信息。第一拍照机构106和载具103具有容纳空间的一侧相对设置,以获取该载具具有容纳空间的一侧的位置图像信息。例如,第一拍照机构106可以设置在载具具有容纳空间一侧的正对面。
33.上片机器人105具有从电池片传送机构102上抓取电池片、调整电池片位置、向载具传送机构104放置电池片的抓取调整机构1051。
34.电池片传送机构102、载具传送机构104、上片机器人105均设置在机架101上。对上片机器人105、电池片传送机构102和载具传送机构104的相对位置关系不作具体限定。
35.第一拍照机构106、第二拍照机构107、上片机器人105的抓取调整机构1051均与控制机构相连接。此处的相连接可以是有线连接或无线连接,不作具体限定。一方面控制机构可以获取到电池片的位置图像信息和容纳空间的位置图像信息。控制机构根据接收的电池片的位置图像信息和容纳空间的位置图像信息对比分析,得出使得每一片电池片更准确适配容纳空间的位置调整信息。另一方面,控制机构控制抓取调整机构1051基于上述位置调整信息调整电池片的位置,相当于在将电池片放置到载具103的容纳空间之前,基于待放置的电池片的位置图像信息,以及容纳空间的位置图像信息,对电池片进行了精准的视觉对位,进而位置调整后的电池片能够更好地适配对应的容纳空间,可以从很大程度上提高在载具103上排布电池片的精准度,同时整个过程均通过各个部件配合自动完成,提高了电池排布的效率和自动化水平。
36.电池片传送机构102的运动方向,与载具传送机构104的运动方向可以平行或垂直,本实用新型实施例对此不作具体限定。例如,参照图1或图2,电池片传送机构102、载具传送机构104的运动方向均可以为从左向右的方向。电池片在电池片传送机构102上的分布方向、电池片在载具103的容纳空间内的分布方向也不作具体限定。例如,电池片在电池片传送机构102上的分布方向可以为水平方向,电池片在载具103的容纳空间内的分布方向可以为纵向放置。抓取调整机构1051可以将水平排布的多个电池片抓取并经位置调整后旋转到载具103上方,下降至载具103的容纳空间,然后释放电池片。
37.可选的,电池片传送机构102具有与电池片对应的容置位,第二拍照机构107和容置位相对设置,此种情况下,第二拍照机构107获取到的电池片的位置图像信息为电池片位于电池片传送机构102的容置位上的位置图像信息,进而控制机构根据接收的电池片位于电池片传送机构102的容置位上的位置图像信息和容纳空间的位置图像信息,进行对比分析,得出使得每一片电池片更准确适配容纳空间的位置调整信息,并控制抓取调整机构1051基于上述位置调整信息调整电池片的位置,可以从很大程度上提高在载具103上排布电池片的精准度。
38.可选的,第二拍照机构107设置在上片机器人105上并与抓取调整机构1051相对设置,此种情况下,第二拍照机构107获取到的电池片的位置图像信息为电池片位于抓取调整机构1051上的位置图像信息,进而控制机构根据接收的电池片位于抓取调整机构1051上的位置图像信息和容纳空间的位置图像信息,进行对比分析,得出使得每一片电池片更准确适配容纳空间的位置调整信息,并控制抓取调整机构1051基于上述位置调整信息调整电池片的位置,可以从很大程度上提高在载具103上排布电池片的精准度。
39.第二拍照机构107与抓取调整机构1051相对设置,相对于第二拍照机构107和容置位相对设置,第二拍照机构107获取到的电池片的位置图像信息与电池片在放置到容纳空间的距离更近,经历的步骤更少,由此得出的位置调整信息可能更为准确。该第二拍照机构107可以为摄像头等,本实用新型实施例对此不作具体限定。
40.可选的,第一拍照机构106包括至少一个第一摄像头,每个第一摄像头的视野范围均包含载具的全部容纳空间,也就是说,每一个第一摄像头就可以将载具上的全部容纳空间拍摄到,如果第一摄像头的数量大于1,可以将各个第一摄像头获取到的载具上全部容纳空间的位置图像信息一起进行比对分析,由此得出的位置调整信息可能更准确,可以进一步提升在载具上排布电池片的精准度。
41.可选的,载具上容纳空间的数量为n,第一拍照机构106包括至少两个第二摄像头,每个第二摄像头的视野范围包含载具上m个容纳空间,所有第二摄像头对应的视野范围包含载具的全部容纳空间;n>m≥1。也就是说,每一个第二摄像头只能拍摄到载具上部分容纳空间的位置图像信息,需要至少两个第二摄像头均拍照,才能获取到载具上全部容纳空间的位置图像信息。各个第二摄像头的视野范围是否有重合不作具体限定,各个第二摄像头的视野范围包含的容纳空间的数量也不作具体限定,各个第二摄像头的视野阀内包含的容纳空间的数量是否相等不作具体限定。此种实现方式更为灵活。
42.例如,载具上容纳空间的数量为12。可以有12个第二摄像头,一个第二摄像头与一个容纳空间相对设置,一个第二摄像头的视野范围仅包含一个容纳空间,各个第二摄像头的视野范围不重叠,12个第二摄像头的总视野范围包含载具上的12个容纳空间。或者,有3
个摄像头,一号第二摄像头的视野范围包含3个容纳空间,二号第二摄像头的视野范围包含10个容纳空间,一号第二摄像头的视野范围和二号第二摄像头的视野范围有2个容纳空间重叠,也就是说一号第二摄像头的视野范围和二号第二摄像头的视野范围一共包含了11个容纳空间。三号第三摄像头与一号第二摄像头的视野范围、二号第二摄像头的视野范围均没有重叠,三号第三摄像头的视野范围仅包含剩余1个容纳空间。
43.可选的,抓取调整机构1051包括从电池片传送机构102上抓取电池片的至少一个真空吸附部件,以及对电池片进行xyz三轴调节的微调对位平台。该微调对位平台与控制机构相连接,控制机构根据接收的电池片的位置图像信息和容纳空间的位置图像信息,进行对比分析,得出使得每一片电池片更准确适配容纳空间的位置调整信息,控制微调对位平台从相互垂直的三个方向上基于上述位置调整信息调整电池片的位置,位置调整更加准确,可以从很大程度上提高在载具103上排布电池片的精准度。上述真空吸附部件可以是平板式的真空吸盘等,本实用新型对此不作具体限定。上述真空吸附部件可以一次吸取一个或多个电池片,多个电池片可以呈一排或一列排布。此处的相连接可以是有线连接或无线连接。
44.图1中,虚线l所示的方向可以为载具传送机构104的运动方向。可选的,参照图1、图2,载具103包括至少一个旋转轴1031,旋转轴1031的轴向与载具传送机构104的运动方向垂直。旋转轴1031上固定有至少一个活动探针排,载具103还包括与活动探针排相对分布的固定探针排。电镀载具的上片装置还包括转动旋转轴1031的至少一个旋转轴开合电机108。旋转轴1031旋转至第一角度的情况下,活动探针排靠近位置对应的固定探针排以夹持电池片。旋转轴1031旋转至第二角度的情况下,活动探针排远离位置对应的固定探针排以卸载电池片。通过旋转轴开合电机108,实现了对活动探针排的自动控制,自动化水平高。一组活动探针排和位置对应的固定探针排可以实现电池片一个边的夹持或释放,与其相对的另一组活动探针排和位置对应的固定探针排可以实现电池片另一个边的夹持或释放。对旋转轴1031的数量、旋转轴开合电机108的数量均不作具体限定。
45.可选的,参照图1、图2,电镀载具的上片装置还可以包括驱动载具传送机构104步进的至少一个传输驱动电机109。对传输驱动电机109的数量不作具体限定。在传输驱动电机109驱动载具传送机构104步进至电池片上片位的情况下,位置对应的旋转轴开合电机108带动旋转轴1031旋转至第二角度,暴露出容纳空间,在上片机器人105向活动探针排和固定探针排之间放置电池片后,位置对应的旋转轴开合电机108带动旋转轴旋转至第一角度,夹紧电池片,通过传输驱动电机109、旋转轴开合电机108的配合自动实现了载具运动、电池片上片和释放,自动化程度高。
46.需要说明的是,在上片机器人105向活动探针排和固定探针排之间放置电池片后,位置对应的旋转轴开合电机108可以立即带动旋转轴1031旋转至第一角度,夹紧电池片,进而可以减少外界扰动对活动探针排和固定探针排的影响,夹持位置更为精准。在每个载具103被排布完成后,可以将载具移出机架。
47.上片机器人105可以只负责某些固定位置的电池片上片,可以具有多个上片机器人105,一次性快速排满整个机架上的载具,此种情况下,可以不设置传输驱动电机109。本实施例,对此不作具体限定。
48.可选的,载具103包括多组相对平行设置的旋转轴1031,电镀载具的上片装置包括
一个旋转轴开合电机108,旋转轴开合电机108控制所有的旋转轴;或,载具103包括多组相对平行设置的旋转轴1031,电镀载具的上片装置包括多个旋转轴开合电机108,每个旋转轴开合电机108控制一组旋转轴,实现方式灵活多样。例如,参照图1、图2,每个旋转轴开合电机108控制一组旋转轴。需要说明的是,此处的一组平行设置的旋转轴1031上的活动探针排和固定探针排可以实现电池片的一对相对边的夹持或释放。
49.可选的,参照图1、图2,电池片传送机构102上,与电池片传送机构102的运动方向垂直的第一侧设置有挡板结构110,和/或,电池片传送机构102上,与电池片传送机构102的运动方向垂直的第二侧设置有挡板结构110,上述第一侧和第二侧相对分布。上述挡板结构110可以在电池片在电池片传送机构102上运动的过程中,限制电池片运动在一定的范围内,避免电池片在电池片传送机构102上运动的过程中偏移过大,可以适当降低抓取调整机构1051的操作复杂度,提高上片效率。
50.电池片传送机构102可以是皮带等传送带,或者传输滚轮等,上述挡板结构110可以是柔性材料,例如柔性橡胶。在本实用新型实施例中,对此不作具体限定。
51.可选的,第一拍照机构106位于载具传送机构104远离电池片传送机构102的一侧,进而为电池片传送机构102、抓取调整机构1051腾出更多的操作空间。
52.可选的,参照图1、图2,上片机器人105位于电池片传送机构102和载具传送机构104之间,使得抓取调整机构1051的操作范围不至过大,可以减小操作空间。
53.本使用新型实施例还提供一种电镀设备,包括前述的任一种电镀载具的上片装置,具有与前述的电镀载具的上片装置类似的有益效果。
54.需要说明的是,在本文中,术语“包括”、“包含”或者其任何其他变体意在涵盖非排他性的包含,从而使得包括一系列要素的过程、方法、物品或者装置不仅包括那些要素,而且还包括没有明确列出的其他要素,或者是还包括为这种过程、方法、物品或者装置所固有的要素。在没有更多限制的情况下,由语句“包括一个
……”
限定的要素,并不排除在包括该要素的过程、方法、物品或者装置中还存在另外的相同要素。
55.通过以上的实施方式的描述,本领域的技术人员可以清楚地了解到上述实施例方法可借助软件加必需的通用硬件平台的方式来实现,当然也可以通过硬件,但很多情况下前者是更佳的实施方式。基于这样的理解,本实用新型的技术方案本质上或者说对现有技术做出贡献的部分可以以软件产品的形式体现出来,该计算机软件产品存储在一个存储介质(如rom/ram、磁碟、光盘)中,包括若干指令用以使得一台终端(可以是手机,计算机,服务器,空调器,或者网络设备等)执行本实用新型各个实施例所述的方法。
56.上面结合附图对本实用新型的实施例进行了描述,但是本实用新型并不局限于上述的具体实施方式,上述的具体实施方式仅仅是示意性的,而不是限制性的,本领域的普通技术人员在本实用新型的启示下,在不脱离本实用新型宗旨和权利要求所保护的范围情况下,还可做出很多形式,这些均属于本实用新型的保护之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。