1.本实用新型属于印刷设备领域,尤其涉及一种可变电阻印刷智能生产线。
背景技术:
2.阻值可以调整的电阻器,用于需要调节电路电流或需要改变电路阻值的场合。 可变电阻器可以改变信号发生器的特性,使灯光变暗,启动电动机或控制它的转速。根据用途的不同,可变电阻器的电阻材料可以是金属丝、金属片、 碳膜或导电液。对于一般大小的电流,常用金属型的可变电阻器。在电流很小的情况下, 则使用碳膜型,当电流很大时,电解型最合用;这种可变电阻器的电极都浸在导电液中。电势计是可变电阻器的特殊形式,它使未知电压或未知电势相平衡,从而测出未知电压或未知电势差的大小。更为常用的电势器只不过是一个有两个固定接头的电阻器,第三个接头连到一个可调的电刷上。电位器的另一个用途是在音响设备中用作音响控制。
3.目前,贴片电阻又称为片式固定电阻器,是金属玻璃铀电阻器中的一种,使将金属粉与玻璃铀分混合,采用丝网印刷法印刷在基板上支撑的电阻器,具有耐潮湿、高温系数小的特点,被广泛应用,但是现有的生产厂家在印刷电阻时基本都是人工手放料、取料和传送物料,但是人工操作会经常出现放料不到位、不稳定,人工传送物料效率太低,本实用新型创造采用六轴机器人取料,运行非常更加稳定,取料放料精准, 同时前期的传送物料效率非常高,还可以同时对物料进行一些除静电除尘等工艺处理。
技术实现要素:
4.针对现有技术存在的问题,本实用新型提供了一种可变电阻印刷智能生产线。
5.本实用新型是这样实现的,一种可变电阻印刷智能生产线,包括六轴机器人及与该六轴机器人对接设置的除尘去静电上料机(1)、半自动网印机(40)、红外线输送式干燥机(50);所述除尘去静电上料机(1)包括设置于除尘去静电上料机架线性滑轨(14),该线性滑轨(14)两端分别设置储料区(2)和除尘去静电区(6);
6.优选的,六轴机器人包括机器人固定架(30)、机器人底座(31)和机器人转动臂(32),所述机器人转动臂(32)下固定安装有机器人负压吸取结构(33);
7.优选的,所述储料区(2)还设有给物料定位的限位杆(3);
8.优选的,除尘去静电区(6)包括除尘轴(8)和离子静电消除棒(10);
9.优选的,所述除尘轴(8)上下设有粘尘轮;
10.优选的,所述离子静电消除棒(10)上设有吹气孔(13);
11.优选的,所述离子静电消除棒(9)对称可拆卸设置在除尘轴(8)两侧;
12.优选的,所述负压吸取结构(33)为两组,对称设置在机器人转动臂(32)下面,每个负压吸取结构(33)有多个负压吸嘴。
13.所述红外线输送式干燥机包括输送带和设置于输送带上方的干燥罩,于该干燥罩内部沿输送方向并排设置矽热板,于矽热板侧方设置散热管道,该散热管道汇集于干燥罩
端部的散热风机。
14.有益效果:
15.1、本专利在传送物料是采用自动化传送,效率非常高,同时采用了除静电除尘技术,保证后期印刷产品的品质。
16.2、本专利在中间取物料和放物料时采用了目前最先进的六轴机器人手臂,让整个取放物料非常稳定精准,最大限度的节省人力资源及提高生产效率。
附图说明
17.图1是本实用新型实施例提供的可变电阻印刷智能生产线的整体结构示意图;
18.图2是本实用新型实施例提供的除尘去静电上料机的整体结构示意图;
19.图3是本实用新型实施例提供的除尘去静电上料机的a处放大结构示意图;
20.图4是本实用新型实施例提供的除尘去静电上料机的除尘和去静电结构示意图;
21.图5是本实用新型实施例提供的是离子静电消除棒的结构示意图;
22.图6是本实用新型实施例提供的六轴机器人结构示意图;
23.图7是本实用新型实施例提供的六轴机器人的运行轨迹示意图;
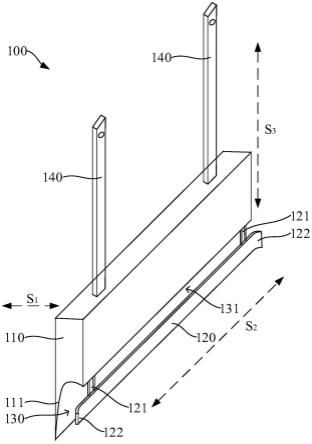
24.图8是本实用新型实施例提供的半自动网印机的结构示意图;
25.图中:1、除尘去静电上料机;2、储料区;3、限位杆;4、传送皮带;5、吸取装置;6、除尘去静电区;7、六轴机器人待取料区;8、除尘轴;10、离子静电消除棒;11、传送轮;12、限宽滑杆;13、吹气孔;14、线性滑轨;30、机器人固定架;31、机器人底座;32、机器人转动臂;33、转动臂负压吸取结构;35、六轴机器人;40、半自动网印机;41、印刷平台放料区;50、红外线输送式干燥机。
具体实施方式
26.为能进一步了解本实用新型的
技术实现要素:
、特点及功效,兹例举以下实施例,并配合附图详细说明如下。
27.下面结合附图对本实用新型的结构作详细的描述。
28.如图1,一种可变电阻印刷智能生产线包括六轴机器人(35)及与该六轴机器人(35)对接设置的除尘去静电上料机(1)、半自动网印机(40)、红外线输送式干燥机(50);
29.如图2-3,所述除尘去静电上料机(1)包括设置于除尘去静电上料机架线性滑轨(14),该线性滑轨(14)两端分别设置储料区(2)和除尘去静电区(6):储料区(2)是放置物料,本设备的物料是片状的可变电阻,通常是长方形或者方形片状,储料区(1)上有限位杆(3)用来对物料起到一个定位作用,方便后面的吸取装置(5)吸取,吸取装置(5)采用的的负压吸取原理,另外一端活动连接在线线滑轨(14)上,可以在线性滑轨(14)上来回滑动,吸取装置(5)在储料区(1)吸取物料后,经过线性滑轨(14)将物料放置在传送皮带(4)上,经过传送皮带(4)传送到除尘去静电区(6);
30.如图4-5,所述除尘去静电区(6)包括除尘轴(8)和离子静电消除棒(10),除尘轴(8)上有套设有粘尘轮,粘尘轮上会有一层粘性材料,通过黏附会把物料上的灰尘吸附上,除尘轴和粘尘轮数量为若干,根据产品品质和生产需要可以选择需要安装的数量;离子静电消除棒(10)上设有若干个吹气孔(13),吹气孔(13)会和吹气装置连接,吹气孔(13)正对
着物料经过区,通过吹出来的高压气体去掉物料上的静电,离子静电消除棒(10)对称设在除尘轴(8)左右两侧,物料经过粘尘轮后,还要再经过后面的离子静电消除棒,再传送到六轴机器人待取料区(7),物料进入六轴机器人待取料区(7)后,通过限宽滑杆(12)的滑动会将物料定位在一个固定的位置,待六轴机器人(35)来吸取。
31.如图6,所述六轴机器人(35)包括机器人固定架(30)、机器人底座(31)、机器人转动臂(32)、机器人转动臂(32)、负压吸取结构(33),其中机器人转动臂(32)可以360度任意旋转,机器人转动臂(32)下部固定连接有一对负压吸取结构(33),负压吸取结构(33)对称设在机器人转动臂(32)下面,每个负压吸取结构(33)又有四个负压吸嘴,可以吸取物料;每次六轴机器人的负压吸取结构(33)去六轴机器人待取料区(7)取物料时是空载过去取一个物料。每次启动时,机器人会根据印刷机台面上的信号(判断是否有物料)去做下一个动作,如果时有料的情况下,信号会反馈到六轴机器人上,机器人做下一步成品取物料,如果是没有物料的情况下信号会反馈到机器人上,机器人做下一步取毛坯物料进行印刷动作。
32.如图8所示,所述半自动网印机(40)和印刷平台放料区(41)组成印刷区,六轴机器人的负压吸取结构带着一个物料过来,首先另外一个空载的负压吸取结构去印刷平台放料区(41)吸取一个已经印刷好的物料上来,再旋转180度后放下一个物料待印刷机去印刷,六轴机器人负压吸取结构(33)吸取的已经印刷好的物料进入到红外线输送式干燥机(50),所述红外线输送式干燥机包括输送带和设置于输送带上方的干燥罩,于该干燥罩内部沿输送方向并排设置矽热板,于矽热板侧方设置散热管道,该散热管道汇集于干燥罩端部的散热风机。
33.以上所述仅是对本实用新型的较佳实施例而已,并非对本实用新型作任何形式上的限制,凡是依据本实用新型的技术实质对以上实施例所做的任何简单修改,等同变化与修饰,均属于本实用新型技术方案的范围内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。