1.本发明涉及定制饮食输送装置。
背景技术:
2.近年来,在餐厅中进行使用输送装置的饮食的提供(例如参照专利文献1)。
3.专利文献1:日本专利公开公报特开2016-152904号
4.在输送定制的饮食的情况下,例如可以考虑将饮食的餐盘载放在从厨房到客人坐席的带式输送机上进行输送。但是,在用一个带式输送机形成从厨房到客人坐席的输送路径的情况下,在带式输送机将餐盘向客人坐席运送的期间,无法在厨房将接下来的餐盘载放到带式输送机上。因此,难以高效地提供定制饮食。尤其是,如果到达客人坐席的带式输送机的路径长,则带式输送机的动作时间长,因此定制饮食的提供效率显著降低。
5.因此,为了能够在厨房将饮食高效地载放到带式输送机上,可以考虑在厨房侧另行延伸设置带式输送机,如果载放到厨房侧的带式输送机上的饮食的餐盘向客人坐席侧的带式输送机移动,则停止厨房侧的带式输送机,使得能够载放接下来要输送的饮食的餐盘。在采用这样的系统构成的情况下,为了检测载放在客人坐席侧的带式输送机上的饮食的餐盘在客人坐席被拿起的情况,例如使用沿着带式输送机的长边方向发出检测光的光学式传感器是合理的。但是,该传感器由于需要不检测载放在厨房侧的带式输送机上的饮食的餐盘,所以受光部或者发光部配置在厨房侧的带式输送机与客人坐席侧的带式输送机之间。并且,为了防止由带式输送机输送的饮食的餐盘与该传感器接触,例如迫切需要使传感器为可动式的。
6.但是,由于光学式传感器的受光部与发光部需要精密地定位,所以如果传感器的一部分或者全部成为可动式的,则有可能导致机构的复杂化、传感器的检测不良。
技术实现要素:
7.因此,本发明公开了一种能够通过光学式传感器高精度地检测饮食的餐盘的定制饮食输送装置。
8.为了解决上述问题,在本发明中,在从由主带式输送机形成的厨房侧到客人坐席的输送路径的延长线上偏离的位置通过副带式输送机形成输送路径,并且在两种带式输送机之间设置中间带式输送机以及引导件,所述中间带式输送机具有到达主带式输送机形成的输送路径的延长线上与副带式输送机形成的输送路径的延长线上双方的横向宽度,所述引导件将载放在中间带式输送机上的饮食的餐盘从副带式输送机的终端部向主带式输送机的始端部引导,将检测载放在主带式输送机上的饮食的餐盘的有无的光学式传感器的受光部或者发光部配置在主带式输送机形成的输送路径中的厨房侧的延长线上。
9.详细地说,本发明提供一种定制饮食输送装置,具备:主带式输送机,形成从餐厅的厨房侧到客人坐席的输送路径;副带式输送机,在主带式输送机的厨房侧延伸设置,在从主带式输送机形成的输送路径的延长线上偏离的位置形成输送路径;中间带式输送机,配
置在主带式输送机与副带式输送机之间,具有到达主带式输送机形成的输送路径的延长线上与副带式输送机形成的输送路径的延长线上双方的横向宽度;引导件,配置在中间带式输送机上,将载放在中间带式输送机上的饮食的餐盘从副带式输送机的终端部向主带式输送机的始端部引导;以及主带式输送机用光学式传感器,检测载放在主带式输送机上的饮食的餐盘的有无,光学式传感器的受光部或者发光部配置在主带式输送机形成的输送路径中的厨房侧的延长线上。
10.如果是上述的定制饮食输送装置,则通过中间带式输送机以及引导件,能够在主带式输送机的输送路径的延长线上消除副带式输送机,因此检测载放在主带式输送机上的餐盘的有无的光学式传感器的受光部或者发光部不会妨碍餐盘的去路。并且,光学式传感器的受光部或者发光部无需为了避免与餐盘的接触而设为可动式,因此导致机构的复杂化、传感器的检测不良的可能性也低。
11.另外,也可以为,引导件将载放在中间带式输送机上的饮食的餐盘朝相对于中间带式输送机的输送方向倾斜的方向引导。另外,也可以为,引导件固定在中间带式输送机上。由此,能够将中间带式输送机设为在与主带式输送机相同的输送方向上动作的机构。
12.另外,也可以为,主带式输送机具有:第一主带式输送机,形成从餐厅的厨房侧到客人坐席的第一输送路径;以及第二主带式输送机,形成从餐厅的厨房侧到客人坐席的第二输送路径,引导件具有可动机构,可动机构能够在将载放在中间带式输送机上的饮食的餐盘从副带式输送机的终端部向第一主带式输送机的始端部引导的第一状态与将载放在中间带式输送机上的饮食的餐盘从副带式输送机的终端部向第二主带式输送机的始端部引导的第二状态之间变更。由此,即使在餐盘载放在第一主带式输送机与第二主带式输送机中的任一方的状态下,只要将接下来要输送的餐盘载放到副带式输送机上,就能够立即开始使用了另一方的主带式输送机的餐盘的输送。因此,能够高效地将定制的饮食向客人坐席输送。
13.另外,也可以为,定制饮食输送装置还具备控制装置,如果进行了输送开始操作,则控制装置使副带式输送机、中间带式输送机以及主带式输送机动作,将载放在副带式输送机上的饮食的餐盘向客人坐席输送,如果由于进行了所述输送开始操作而将饮食的餐盘从所述副带式输送机经由所述中间带式输送机载放到所述主带式输送机上,则所述控制装置在所述主带式输送机停止之前,使所述副带式输送机成为能够载放接下来要输送的餐盘的停止状态。由此,由于能够在主带式输送机输送饮食的餐盘的期间将其他的饮食的餐盘载放到副带式输送机上,因此能够高效地输送饮食。
14.另外,也可以为,上述的定制饮食输送装置还具备拍摄装置,所述拍摄装置拍摄中间带式输送机。如果是这样的定制饮食输送装置,则能够通过图像确认由带式输送机输送的饮食的状态。
15.如果是上述的定制饮食输送装置,则能够通过光学式传感器高精度地检测饮食的餐盘。
附图说明
16.图1是实施方式的定制饮食输送装置的整体构成图。
17.图2是将副带式输送机附近放大的图。
18.图3表示在进行了输送开始操作的情况下执行的控制流程图。
19.图4是表示输送时的餐盘的移动的图。
20.图5是第一变形例的定制饮食输送装置的整体构成图。
21.图6表示当在第一变形例中进行了输送开始操作的情况下执行的控制流程图。
22.图7是表示第一变形例的输送时的餐盘的移动的图。
23.图8是第二变形例的定制饮食输送装置的整体构成图。
24.图9是第三变形例的定制饮食输送装置的整体构成图。
25.图10是将第四变形例的定制饮食输送装置的副带式输送机附近放大的图。
26.附图标记说明:
27.1:餐盘;2:厨房;3:客人坐席;10:定制饮食输送装置;20:主带式输送机;24:光学式传感器;24h:发光部;24j:受光部;30:副带式输送机;30g1、30g2、30gc:引导件;30m:中间带式输送机;34:光学式传感器;34h:发光部;34j:受光部;40:分支通道;50:去路变更装置;s9:相机。
具体实施方式
28.以下,对本发明的实施方式进行说明。以下所示的实施方式是本发明的一个方式,并不限定本发明的技术范围。以下所示的各实施方式、变形例例如适用于向在店内饮食的客人提供寿司、饮料、荞麦面及乌冬面之类的盖浇饭、炸鸡及天妇罗之类的各种饮食的餐厅。
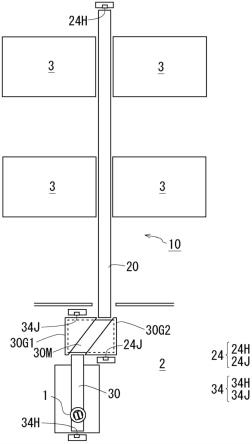
29.图1是实施方式的定制饮食输送装置10的整体构成图。定制饮食输送装置10是将接受客人的定制而准备的饮食的餐盘1从餐厅的厨房2向客人坐席3输送的装置,如图1所示,定制饮食输送装置10形成通过客人进行饮食的各客人坐席3的旁边的输送路径。定制饮食输送装置10具备:主带式输送机20,形成从餐厅的厨房2侧到达客人坐席3的输送路径;以及副带式输送机30,在主带式输送机20的厨房2侧延伸设置,使输送路径延伸。另外,在本实施方式中,主带式输送机20形成为直线状,但是也可以通过组合多个主带式输送机20而使主带式输送机20形成具有拐角部分的输送路径。
30.在主带式输送机20的厨房2侧延伸设置的副带式输送机30在从主带式输送机20形成的输送路径的延长线上偏离的位置形成输送路径。并且,在主带式输送机20与副带式输送机30之间设置有中间带式输送机30m,所述中间带式输送机30m具有到达主带式输送机20形成的输送路径的延长线上与副带式输送机30形成的输送路径的延长线上的双方的横向宽度。另外,在中间带式输送机30m上固定有引导件30g1、30g2,所述引导件30g1、30g2将载放在中间带式输送机30m上的餐盘1从副带式输送机30的终端部向主带式输送机20的始端部引导。在主带式输送机20的厨房2侧延伸设置的副带式输送机30由于在从主带式输送机20形成的输送路径的延长线上偏离的位置形成输送路径,所以在朝向中间带式输送机30m的输送方向(带的移动方向)观察的情况下,主带式输送机20的始端部的位置相对于副带式输送机30的终端部在横向上偏离。因此,引导件30g1、30g2在中间带式输送机30m上形成相对于中间带式输送机30m的输送方向倾斜的引导件。
31.另外,定制饮食输送装置10具备光学式传感器24。光学式传感器24是检测载放在主带式输送机20上的饮食的餐盘1的有无的光学式传感器,具有受光部24j以及发光部24h。
受光部24j配置在主带式输送机20的厨房2侧。另外,发光部24h固定在主带式输送机20的客人坐席3侧的端部。光学式传感器24基于厨房2侧的受光部24j是否接收到发光部24h从主带式输送机20的客人坐席3侧向厨房2侧发出的光,检测载放在主带式输送机20上饮食的餐盘1的有无。如果在主带式输送机20上载放有饮食的餐盘1,则从发光部24h朝向受光部24j发出的光在到达受光部24j之前被餐盘1遮挡。另外,受光部24j与发光部24h的位置关系也可以相反。
32.另外,定制饮食输送装置10具备光学式传感器34。光学式传感器34是检测载放在副带式输送机30上的饮食的餐盘1的有无的光学式传感器,具有受光部34j以及发光部34h。受光部34j配置在副带式输送机30的客人坐席3侧的端部附近。另外,发光部34h配置在副带式输送机30的相反侧的端部附近。光学式传感器34基于受光部34j是否接收到发光部34h发出的光,检测载放在副带式输送机30上的饮食的餐盘1的有无。如果在副带式输送机30上载放有饮食的餐盘1,则从发光部34h向受光部34j发出的光在到达受光部34j之前被餐盘1遮挡。另外,受光部34j与发光部34h的位置关系也可以相反。
33.图2是将副带式输送机30附近放大的图。在主带式输送机20的厨房2侧延伸设置且以使主带式输送机20的输送路径延伸的方式配置的副带式输送机30具有能够将餐盘1沿着副带式输送机30的输送路径的长边方向排列放置多个(例如4个)的长度。另外,在副带式输送机30的附近设置有用于接受各种操作的未图示的操作面板。并且,如观察图2所能判明的那样,中间带式输送机30m是利用围绕在配置在副带式输送机30的终端部附近的第一辊与配置在主带式输送机20的始端部附近的第二辊之间的带输送餐盘1的带式输送机。并且,由于在中间带式输送机30m的输送面上设置有引导件30g1、30g2,所以如果中间带式输送机30m动作,则载放在中间带式输送机30m上的餐盘1与引导件30g1、30g2接触,从副带式输送机30的终端部朝向主带式输送机20的始端部倾斜地移动。
34.驱动主带式输送机20以及副带式输送机30的驱动马达由未图示的控制装置控制,基于输入到操作面板的操作内容、来自各传感器的信号进行控制。以下,对由控制装置实现的定制饮食输送装置10的动作进行说明。
35.如果在操作面板上进行输送开始操作,则定制饮食输送装置10的控制装置使副带式输送机30、中间带式输送机30m以及主带式输送机20动作,将载放在副带式输送机30上的饮食的餐盘1向客人坐席3输送。
36.图3表示在进行了输送开始操作的情况下执行的控制流程图。定制饮食输送装置10的控制装置判断在操作面板上是否进行了餐桌的选择操作(s101)。餐桌的选择可以根据从由客人坐席3的终端接受定制的系统提供的信息自动地进行。控制装置如果检测到在步骤s101的处理中进行了餐桌的选择操作,则接着判断是否进行了输送开始的操作(s102)。然后,控制装置如果检测到在步骤s102的处理中进行了输送开始的操作,则使主带式输送机20、中间带式输送机30m以及副带式输送机30动作(s103)。
37.控制装置在执行了步骤s103的处理后,判断载放在副带式输送机30上的全部的餐盘1是否都载放到主带式输送机20上(s104)。控制装置对于载放在副带式输送机30上的全部的餐盘1是否都载放到主带式输送机20上的判断,例如可以基于光学式传感器34来判断,也可以基于设置在副带式输送机30与主带式输送机20的边界附近的传感器的检测结果来判断,或者还可以基于从使副带式输送机30启动开始的经过时间来判断。当在步骤s104的
处理中做出了肯定判断的情况下,控制装置使中间带式输送机30m以及副带式输送机30停止(s105)。
38.控制装置在执行了步骤s105的处理后,判断餐盘1是否到达了被选择的餐桌(s106)。控制装置对于餐盘1是否到达餐桌的判断,例如可以基于设置在餐桌附近的传感器的检测结果来判断,也可以基于针对每个餐桌的位置而预先设定的从输送开始起的经过时间来判断。当在步骤s106的处理中做出了肯定判断的情况下,控制装置使主带式输送机20停止(s107)。
39.控制装置在执行了步骤s107的处理后,基于光学式传感器24的信息,判断载放在主带式输送机20上的全部的餐盘1是否都被取下(s108)。当在步骤s108的处理中做出了肯定判断的情况下,控制装置再次执行步骤s101以后的处理。
40.另外,当在步骤s101与步骤s102中的任一步骤中做出了否定判断的情况下,控制装置省略步骤s103以后的处理,再次执行步骤s101以后的处理。
41.图4是表示输送时的餐盘1的移动的图。如果进行了输送开始请求,则如图4的(a)所示,主带式输送机20、中间带式输送机30m以及副带式输送机30动作,将载放在副带式输送机30上的餐盘1依次向中间带式输送机30m上送出。如图4的(b)所示,从副带式输送机30的终端部送出到中间带式输送机30m的餐盘1被引导件30g1、30g2向主带式输送机20的始端部引导。然后,如图4的(c)所示,从中间带式输送机30m送出到主带式输送机20上的餐盘1通过主带式输送机20上朝向输送目的地的客人坐席3移动。然后,如图4的(d)所示,由主带式输送机20输送的餐盘1不久到达输送目的地的客人坐席3并停止。然后,如果客人坐席3的客人取走餐盘1而全部的餐盘1都从主带式输送机20消失,则在步骤s108中进行肯定判断。
42.由定制饮食输送装置10的控制装置实现的主要的动作内容如以上所说明的那样。在上述定制饮食输送装置10中,如果载放在副带式输送机30上的全部的餐盘1都载放到主带式输送机20上,则即使在主带式输送机20动作的期间,副带式输送机30也停止,因此厨房2的工作人员能够立即将下一个餐盘1载放到副带式输送机30上。因此,即使在饮食的定制多的情况下,也能够高效地将定制的饮食向客人坐席输送。上述定制饮食输送装置10产生的这样的效果在由主带式输送机20形成的输送路径长的餐厅中特别显著。
43.并且,如果是上述实施方式的定制饮食输送装置10,则通过中间带式输送机30m以及引导件30g1、30g2,在主带式输送机20的输送路径的延长线上没有副带式输送机30,因此,检测载放在主带式输送机20上的餐盘1的有无的光学式传感器24的受光部24j以及检测载放在副带式输送机30上的餐盘1的有无的光学式传感器34的受光部34j不会妨碍餐盘1的去路。并且,光学式传感器24的受光部24j以及光学式传感器34的受光部34j无需为了避免与餐盘1的接触而设为可动式,因此导致机构的复杂化、传感器的检测不良的可能性也低。
44.<第一变形例>
45.但是,上述实施方式的定制饮食输送装置10例如也可以如以下那样进行变形。
46.图5是第一变形例的定制饮食输送装置10的整体构成图。在本变形例的定制饮食输送装置10中,在各客人坐席3设置有分支通道40。分支通道40设置在主带式输送机20形成的输送路径的旁边,从输送路径分支而形成下斜的路径。分支通道40是通过设置在从主带式输送机20形成的输送路径向分支通道40分开的分支部分的去路变更装置50换载从主带式输送机20的输送路径分支的饮食的餐盘1的通道,沿着由主带式输送机20形成的输送路
径配置。分支通道40由转动自如的输送用的辊组形成。分支通道40形成从主带式输送机20的输送路径向侧方分支进而沿着主带式输送机20的输送路径的下斜的路径,因此,当载放餐盘1时,辊滚动,餐盘1向分支通道40的终端侧接近。分支通道40例如也可以设置在吧台坐席用的餐桌。
47.去路变更装置50通过使去路变更构件相对于主带式输送机20形成的输送路径上从侧方进出,能够将由主带式输送机20输送的饮食的餐盘1向分支通道40侧引导。去路变更装置50通过内置的未图示的旋转螺线管使去路变更构件动作。另外,去路变更装置50并不限定于将旋转螺线管作为驱动源,例如也可以应用电动的马达、其他各种驱动源。
48.图6表示在第一变形例中进行了输送开始操作的情况下执行的控制流程图。本变形例的定制饮食输送装置10的控制装置判断在操作面板上是否进行了餐桌的选择操作(s201)。然后,控制装置如果检测到在步骤s201的处理中进行了餐桌的选择操作,则接着判断是否进行了输送开始的操作(s202)。然后,控制装置如果检测到在步骤s202的处理中进行了输送开始的操作,则使在向设置于被选择的餐桌的分支通道40分支的分支点设置的去路变更装置50动作,使去路变更构件向主带式输送机20上伸出(s203)。然后,控制装置使主带式输送机20、中间带式输送机30m以及副带式输送机30动作(s204)。
49.控制装置在执行步骤s204的处理后,判断载放在副带式输送机30上的全部的餐盘1是否都经由中间带式输送机30m载放到了主带式输送机20上(s205)。当在步骤s205的处理中做出了肯定判断的情况下,控制装置使中间带式输送机30m以及副带式输送机30停止(s206)。
50.控制装置在执行步骤s206的处理后,判断餐盘1是否接近向位于被选择的餐桌的分支通道40分支的分支点(s207)。控制装置对于餐盘1是否接近分支点的判断,例如可以基于设置在分支点的附近的传感器的检测结果来判断,也可以基于从针对每个分支点的位置而预先设定的从输送开始起的经过时间来判断。当在步骤s207的处理中做出了肯定判断的情况下,控制装置使主带式输送机20减速(s208)。
51.控制装置在执行了步骤s208的处理后,基于光学式传感器24的信息判断载放在主带式输送机20上的全部的餐盘1是否都移动到分支通道40上(s209)。然后,当在步骤s207的处理中做出了肯定判断的情况下,控制装置使主带式输送机20停止,使去路变更装置50的去路变更构件从主带式输送机20上退避,再次执行步骤s201以后的处理。(s210)。
52.另外,控制装置当在步骤s201和步骤s202中的任一步骤中进行了否定判断的情况下,省略步骤s203以后的处理,再次执行步骤s201以后的处理。
53.图7是表示第一变形例的输送时的餐盘1的移动的图。如果进行了输送开始请求,则如图7的(a)所示,主带式输送机20、中间带式输送机30m以及副带式输送机30动作,将载放在副带式输送机30上的餐盘1依次向中间带式输送机30m上送出。如图7的(b)所示,从副带式输送机30的终端部送出到中间带式输送机30m的餐盘1被引导件30g1、30g2向主带式输送机20的始端部引导。然后,如图7的(c)所示,从中间带式输送机30m送出到主带式输送机20上的餐盘1通过主带式输送机20朝向输送目的地的客人坐席3移动,与去路变更装置50的去路变更构件接触而被向分支通道40引导。然后,如图7的(d)所示,被引导到分支通道40的餐盘1在位于输送目的地的客人坐席3的分支通道40上停止。在本变形例中,如果从副带式输送机30经由中间带式输送机30m向主带式输送机20送出的全部的餐盘1都从主带式输送
机20向分支通道40移动,则在步骤s209中进行肯定判断。
54.由变形例的定制饮食输送装置10的控制装置实现的主要的动作内容如以上所说明的那样。本变形例也与上述实施方式同样,即使在主带式输送机20动作的期间,副带式输送机30也停止,因此厨房2的工作人员能够立即将下一个餐盘1载放到副带式输送机30上。另外,通过中间带式输送机30m以及引导件30g1、30g2,在主带式输送机20的输送路径的延长线上没有副带式输送机30,因此检测载放在主带式输送机20上的餐盘1的有无的光学式传感器24的受光部24j、检测载放在副带式输送机30上的餐盘1的有无的光学式传感器34的受光部34j不会妨碍餐盘1的去路。并且,光学式传感器24的受光部24j以及光学式传感器34的受光部34j由于无需为了避免与餐盘1接触而设为可动式,因此导致机构的复杂化、传感器的检测不良的可能性也低。
55.<第二变形例>
56.另外,上述实施方式的定制饮食输送装置10例如也可以如以下那样进行变形。
57.图8是第二变形例的定制饮食输送装置10的整体构成图。在本变形例的定制饮食输送装置10中平行地设置有2个主带式输送机20。并且,引导件30g1、30g2为棒状,成为能够在维持彼此平行的状态下变更引导方向的可动机构。即,引导件30g1、30g2通过由控制装置控制的马达等,能够将从副带式输送机30的终端部向主带式输送机20的始端部引导餐盘1的路径切换成两个主带式输送机20中的任一个(是本技术中所说的“第一状态”与“第二状态”的一例)。
58.如果是本变形例的定制饮食输送装置10,则即使在将餐盘1载放在2个主带式输送机20中的任一方的主带式输送机20上的状态下,只要将接下来要输送的餐盘1载放到副带式输送机30上,就能够立即开始使用了另一方的主带式输送机20的餐盘1的输送。因此,如果是本变形例,则能够高效地将定制的饮食向客人坐席输送。
59.<第三变形例>
60.另外,上述实施方式的定制饮食输送装置10例如也可以如以下那样进行变形。
61.图9是第三变形例的定制饮食输送装置10的整体构成图。与第二变形例同样,本变形例的定制饮食输送装置10平行地设置有2个主带式输送机20。但是,引导件30g1、30g2与实施方式同样地被固定,不像第二变形例那样成为可动机构。并且,引导件30g1形成向输送方向朝左侧的主带式输送机20的始端部倾斜的引导件。另外,引导件30g2形成向输送方向朝右侧的主带式输送机20的始端部倾斜的引导件。在本变形例中,载放在中间带式输送机30m上的餐盘1通过在中间带式输送机30m上摆动的可动式的引导件30gc变更去路。即,引导件30gc成为能够以设置在2个主带式输送机20的始端部彼此之间的可动机构为中心进行摆动动作的棒状的引导件,通过由控制装置控制的马达等,能够将从副带式输送机30的终端部向主带式输送机20的始端部引导餐盘1的路径切换成2个主带式输送机20中的任一个(本技术中所说的“第一状态”与“第二状态”的一例)。
62.如果是本变形例的定制饮食输送装置10,则与第二变形例同样,即使在将餐盘1载放在2个主带式输送机20中的任一方的主带式输送机20上的状态下,如果将接下来要输送的餐盘1载放到副带式输送机30上,就能够立即开始使用了另一方的主带式输送机20的餐盘1的输送。因此,如果是本变形例,则能够高效地将定制的饮食向客人坐席输送。
63.<第四变形例>
64.图10是将第四变形例的定制饮食输送装置的副带式输送机附近放大的图。定制饮食输送装置10除了用于控制输送装置的传感器以外,例如也可以具备用于监视饮食的状态的传感器。例如如图10所示,定制饮食输送装置10还具备相机s9,所述相机s9拍摄载放在中间带式输送机30m上的餐盘1。如果定制饮食输送装置10具备这样的相机s9,则能够取得通过中间带式输送机30m的餐盘1的图像,因此,例如能够通过由相机s9取得的图像的自动分析等检测向主带式输送机20送出的饮食的外观有无异常。
65.相机s9可以是始终拍摄载放在中间带式输送机30m上的饮食的相机,也可以是与中间带式输送机30m动作同时进行拍摄的相机。由相机s9取得的图像能够用于确认载放在餐盘4上的寿司的翻倒、载放在寿司饭上的食材的位置偏离、其他各种异常的有无。图像可以是厨房的工作人员在目视的监视中参照的图像,或者也可以是由分析图像而判断有无异常的图像分析装置参照的图像。
66.另外,由相机s9取得的图像例如也可以用于带式输送机的状态监视。由相机s9取得的图像例如可以用于带式输送机的带表面的污垢、带的绽开等带本身的损伤、异物混入带式输送机的间隙部分等各种异常的感测。
67.<其他变形例>
68.另外,上述实施方式、变形例的定制饮食输送装置10能够适当地组合。定制饮食输送装置10例如可以分别设置2个以上的主带式输送机20、中间带式输送机30m、副带式输送机30。另外,中间带式输送机30m也可以作为向主带式输送机20送出前的餐盘1的待机部位。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。