1.本发明涉及用于提供粘弹性介质的图像的超声波成像方法和设备。具体地说,所述方法的目的在于量化介质的非线性,尤其是检测介质中的软癌性区域(即与非癌性介质相比是非硬化的)。
2.更具体地说,本发明涉及一种使用超声波来观察扩散粘弹性介质的成像方法,该介质包含反射所述超声波的颗粒。
背景技术:
3.可通过不同方法获得超声波图像。例如,获得的图像可以是通过被观察组织的变形而获得的静态弹性(英语中为“strain”)类型的,或者是剪切波弹性类型的(英语中为“shear wave elastography,swe”)。
4.已知的是,通过介质的剪切波弹性成像(英语中为“shear wave elastography,swe”)的超声波成像来检测硬化癌症。然而,该技术不能检测软组织癌症,这是因为软组织癌症在常规弹性成像的图像上呈现与非癌性介质相似的弹性。
5.而且,确定介质的非线性特性是已知的,参见例如:
6.h.latorre-ossa,jl gennisson,e.de brosses,m fink,quantitative imaging of nonlinear shear modulus by combining static elastography and shear wave elastography,ieee trans ultrason ferroelectr freq control.2012年4月,59(4):833-9,和
7.m.bernal,f.chamming’s,m couade,j berfcoff,m.tanterm jl gennisson,in vivo quantification of the nonlinear shear modulus in breast lesions:feasibility study.ieee trans ultrason ferroelectr freq control.2016年1月,63(1):101-9.doi:10.1109/tuffc.2015.2503601.2015年11月24日电子出版。
8.然而,为了取得关于非线性的信息,必须解决多个问题,尤其是找到表示作为剪切模量和变形的函数的剪切模量的非线性的数学表达式,确定/测量计算该数学表达式所需的数值,和建立允许取得该信息的测量和计算方法。
技术实现要素:
9.因此,本发明的目的在于改善对非硬化癌症的检测和诊断。
10.为此,本发明提供一种用于量化介质的非线性剪切波弹性的方法,该方法使用以下步骤:
11.a1.采集所述介质的一时间序列的剪切波弹性数据;
12.a2.在采集剪切波期间,根据预定序列,将连续变化的变形序列施加给介质;
13.a3.观察(估计的)实际变形的演变;和
14.b.根据所述时间序列的数据和变形的演变,量化所述介质的非线性弹性。
15.得益于这些设置,软组织癌症、例如乳腺癌的超声波图像检测或诊断能得到改善。在标准swe弹性成像的图像(无压缩)上,软组织癌症显示出与健康组织或软的良性病变相似的弹性。然而,已经发现,通过在swe弹性成像期间压缩组织(介质),在健康组织中和在恶性病变中,弹性以不同的方式变化。nl-swe成像旨在定性和量化该现象。
16.例如,基于声弹性理论,可从应变和swe图像得出组织的剪切模量的非线性(英语为share modulus non linearity)或非线性弹性剪切系数或硬化(英语为stiffering)。具体地说,在该模式中,通过用探头对组织压缩或解除压缩,人类操作员(或机器,或可握持或操作超声波探头的任何事物)可获取一系列swe图像和应变图像,用于得出表示介质的剪切模量的非线性或硬化率的图。
17.而且,本发明尤其可解决目的在于从非线性提取信息的以下问题:
18.1.找到一个数学表达式,其将剪切模量的非线性表示为剪切模量和应变的函数。
19.2.开发一种超声波序列,其能够同时获取b模式图像、剪切波弹性成像(swe)图像和应变弹性成像图像(通过变形)。
20.3.开发一种技术,用于在压缩期间,或在压缩结束时,或在压缩过程中计划的专用步骤期间,聚合(agr
é
ger)和重新调整(recaler)应变图像和swe图像。
21.4.开发一种用户界面,其引导操作员进行压缩/解除压缩。
22.5.创建一种探头附件,其能够引导压缩/解除压缩。
23.在根据本发明的方法的不同实施例中,可选地还可以利用以下设置中的一个和/或另一个:
24.根据一个方面,实时或几乎实时地观察实际变形的演变。由此,由于该实时或几乎实时的观察,可连续地并逐渐地(即没有暂停)进行变形。
25.根据一个方面,利用超声波探头,通过用探头对介质相继压缩或相继解除压缩,来施加连续变化的变形,同时用探头采集所述时间序列的数据和/或观察实际变形的演变。该方法可利用运动估计算法,包括(但不限于)基于多普勒效应、散斑跟踪和/或光流的方法。
26.可(如下所述)通过介质的应变来代表或测量对实际变形的演变的观察。
27.根据一个方面,连续地且逐渐地实施相继压缩和/或相继解除压缩。例如,压缩和/或解除压缩是没有暂停或停止的连续运动。
28.根据一个方面,观察实际变形的演变的步骤包括采集介质的一时间序列的超声波数据,尤其是以便允许计算变形,例如采集一时间序列的静态弹性(应变)数据。
29.根据一个方面,在用户界面上通知估计的实际变形水平和目标变形水平,其中,估计的实际变形水平尤其是实时地,对应于所观察的变形,并且所述目标变形根据所述预定变形序列,尤其是实时地,改变(尤其是连续地且逐渐地)。
30.要指出的是,可以仅估计实际变形水平,即该水平可以是有些不精确的。
31.根据一个方面,在用户界面的屏幕上显示估计的实际变形水平和目标变形水平。
32.根据一个方面,通过以下子步骤生成在步骤(a1)中产生的剪切波弹性数据:
33.a1.1.激励步骤,在该步骤期间,通过使得发射至少一束聚焦超声波,在介质中生成剪切波,
34.a1.2.观察步骤,在该步骤期间,通过获取介质的一时间序列的超声波数据,观察剪切波的传播,
35.a1.3.处理步骤,在该步骤中,基于所述介质的超声波数据和剪切波传播模型,确定弹性数据。
36.该方法可以使用平面波,但该步骤也可使用聚焦波来实施。
37.根据一个方面,使用让剪切波弹性射束和静态弹性射束交替的超声波序列,来实施采集一时间序列的数据和观察变形的连续改变,和/或静态弹性数据和剪切波弹性数据在时间上交错。。
38.所述方法可以还包括步骤:a1’.采集关于介质的一时间序列的静态弹性(δε
t
)数据。
39.在步骤a3中,可通过静态弹性(δε
t
)得出实际变形。
40.该静态弹性可以是拉格朗日静态弹性(δε
t
)。
41.特别地,该时间序列的静态弹性(δε
t
)数据可包括一时间序列的静态弹性数值(δε
t
)。该时间序列的剪切波弹性数据(et)包括一时间序列的剪切波弹性数值(et),
42.可根据静态弹性数值(δε
t
)的积分,确定总静态弹性(ε
t
)。
43.在步骤a3中,可根据所确定的总静态弹性(ε
t
),确定实际变形。
44.所述方法可以还包括步骤:a6’.基于以下参数中至少一个,确定质量参数:剪切波弹性(et)、静态弹性(δε
t
)和总静态弹性(ε
t
)。
45.可根据总静态弹性的当前数值(ε
t
)和先前数值(ε*
t-1
)之间的比较,确定质量参数。
46.质量结果可以是布尔变量。
47.可根据总静态弹性的当前数值(ε
t
)是否超过增大或减小第一差值阈值的先前数值确定质量参数。该预定差值阈值可以是固定的,或是取决于预定函数的。
48.可以根据最小时长,确定质量参数,在该最小时长期间,估计的实际变形水平(由总静态弹性(ε
t
)代表)对应于目标变形水平(例如,在预定公差内)。
49.可以根据剪切波弹性(et)和/或静态弹性(δε
t
)的当前数值的熵是否处于预定范围内,确定质量参数。
50.只要所确定的质量参数超过第一最小质量阈值,在步骤b中,就可使用剪切波弹性(et
*
)和总静态弹性的当前数值来量化介质的非线性弹性。由此,仅能够使用可接受的质量水平的数值。相反,不合格的数值可用作接下来的周期t 1中的比较数值。
51.只要所确定的质量参数不超过最小质量阈值,则有以下可选的行动:
52.不使用剪切波弹性(et)和总静态弹性(ε
t
)的当前数值来量化介质的非线性弹性,和/或
53.将表示所确定的质量参数的反馈信息呈现给探头的用户,和/或
54.可选地在接下来的周期(t 1)中重复所述方法。
55.可以根据质量参数来调整预定变形序列。
56.如果所确定的质量参数不超过最小质量阈值,则可中断或暂停预定变形序列。
57.由此,预定变形序列可以是预定的,但也可以可选地取决于所获取的数据的质量。
58.所述方法还可以包括步骤:c.确定表示介质的非线性弹性水平的视觉信息,该视觉信息包括以下中的至少一项:显示介质的非线性弹性水平的图像、分数和/或符号。
59.所述方法还可以包括步骤:d.将包括以下中的至少一项的反馈信息呈现给探头的用户:实际变形、质量参数和视觉信息。
60.可重复步骤a1.至b.,或a1.至c.,或a1.至d.,和/或可重复步骤a1.至b.,或a1.至c.,或a1.至d.直至满足以下条件中的一个:所确定的质量参数不超过低于第一最小质量阈值的第二最小质量阈值,和/或已经实施了最大迭代次数,和/或该方法的最大时间已过,和/或已经对所述介质的非线性弹性实施了最小数量的量化。
61.所述方法因此可包括多个周期t,在这些周期期间,更新和/或精细化所确定的数值。
62.根据一个方面,所述方法还可以包括确定显示介质的非线性弹性水平的图像和/或分数和/或符号的步骤c.。
63.分数和/或符号可以是图标、相对于阈值的数值、短语、数值表等等。
64.根据一个方面,所述方法可以还包括以下步骤:
65.a4.采集介质的一时间序列的b模式数据,以计算介质相对于探头的运动的补偿,
66.a5.将该补偿施加给弹性数据。
67.根据一个方面,b模式数据、静态弹性数据,和剪切波弹性数据在时间上交错。
68.根据一个方面,同时实施步骤(a1)至(a3),或(a1)至(a5),或(a1)至(d),和/或实时或几乎实时地实施(a1)至(a3),或(a1)至(a5),或(a1)至(d)。
69.根据一个方面,对于数据的时间序列的每个时刻或至少对于时刻中的一些,通过根据以下方程实施线性回归拟合,确定剪切波的非线性参数的数值:
70.【数学.1】
[0071][0072]
其中:
[0073]
e(t)是变形演变期间的每个变形时刻的弹性,
[0074]
e0是第一时刻(t0)的弹性,
[0075]
ε是应变,以及
[0076]
a是非线性剪切参数。
[0077]
根据一个方面,所述方法在步骤(a1)之前还包括步骤(0),在该步骤中,在不根据预定变形序列施加变形的情况下,确定介质的至少一个超声波图像或mri(核磁共振成像)图像或乳房照相术图像或剪切波弹性图像,并且该步骤允许确定关注区域(roi),对于该关注区域,根据步骤(a1)至(b)量化非线性弹性。
[0078]
根据一个方面,与非线性弹性图像的显示并行地显示包括可靠性水平的置信度图,以尤其允许医生知悉所呈现的“结果”图像的每个点的评估的置信水平。
[0079]
该置信度图可以是指示示出介质的非线性弹性水平的图像的每个部分的可靠性水平的图(或图像)。可靠性水平可以例如由从线性回归的结果得出的统计数据得出和/或可以考虑施加给组织的实际运动的特征(均匀速度、单轴向运动等)。该图可使用矩阵、图像、颜色代码、和/或表格来实现。
[0080]
根据一个方面,对于每个数据,或对于图像的每个像素,显示相对于预定参照数值的非线性弹性数值。该预定参照数值可以是来自科学文献的预定数值,和/或可对于该相同
病人在之前的检查期间计算出的,或是统计学计算的结果并可以可选地以图形显示。例如,可以不显示非线性弹性数值而显示该数值或除了非线性弹性数值之外还显示该数值(例如对于每个像素或每组像素)。显示预定数值可以有利地允许可靠地分析和/或诊断例如软组织癌性介质和/或表明所观察的癌症的类型。
[0081]
本发明还涉及一种使用成像设备(1)量化介质的非线性剪切波弹性的超声波方法,所述成像设备包括超声波探头(6)、微型计算机(4),和可选地用户界面,所述方法包括以下步骤:
[0082]-将探头置于介质的表面,
[0083]-激活第一非线性剪切波弹性(nl-swe)成像模式,在其期间,探头通过对所述介质逐渐地压缩或逐渐地解除压缩,根据预定变形序列施加变形,
[0084]
ο所述设备采集一时间序列的对用所述探头在所述介质中生成的剪切波成像的超声波数据,该超声波数据允许得出所述介质的弹性,和
[0085]
ο所述设备采集一时间序列的超声波数据,该超声波数据允许得出由所述探头施加的所述介质的变形的演变,
[0086]-量化介质的非线性弹性,其根据所述时间序列的数据和所观察的变形的演变来计算,
[0087]-可选地在用户界面上显示介质的非线性弹性的图像,
[0088]-可选地保存所述时间序列的图像,包括图像的预定计算和测量,
[0089]-可选地在用户界面上显示所述时间序列的图像,
[0090]-可选地显示非线性图像的解读结果。
[0091]
这些图像中的每幅可以是二维或三维的。
[0092]
在启动该nl-swe模式之前,可以实施以下步骤:调整预定变形序列的参数,例如根据临床情况(病人的身材;所考虑的器官的大小,尤其是当涉及乳房组织时;所观察的病变的深度;组织的密度等等)。
[0093]
而且,显示了非线性的图像之后,有例如根据用户偏好(与其它b模式图像重叠等等)调整显示参数、改变单位、改变颜色代码等等的步骤。
[0094]
由于压缩(应力)或解除压缩是逐渐的运动,用户或铰接臂或任何其它操作者可不暂停地,连续地实施该运动。
[0095]
在所述方法的采集步骤中的每个期间,探头可采集超声波数据,可对该超声波数据应用运动估计方法(基于多普勒效应或b模式的散斑跟踪),以提取关于变形的信息,和/或重新调整所采集的超声波数据。
[0096]
根据一个方面,预定变形序列在量化步骤之前包括可选地自动停止的子步骤。这尤其带来以下优势:操作者被通知例如因为已经采集了足够的数据,获取期已结束。
[0097]
根据一个方面,所述方法可以还包括,尤其是在激活第一模式之前:
[0098]-将探头布置在介质的表面上,
[0099]-激活第二剪切波弹性(swe)成像模式,
[0100]-在不根据预定变形序列施加变形的情况下,通过在介质中施加剪切波,确定介质的至少一个剪切波弹性图像,
[0101]-保存图像,可选地包括图像的预定计算和测量,
[0102]-确定图像中的关注区域,以对该区域的非线性弹性成像。
[0103]
本发明还提供一种使用如上所述的方法,相对于非癌性介质确定非硬化癌性介质(相对于良性病变的非硬化恶性病变)的方法,其中,非硬化癌性介质(非硬化恶性病变)是根据其非线性弹性的水平来检测的。
[0104]
特别地,本发明提供一种使用如上所述的方法,相对于非癌性介质确定非硬化癌性介质的方法,其中,所研究的介质是乳房和/或腋窝生物组织。
[0105]
本公开还涉及一种成像设备,其包括适于实施如上所述的用于量化介质的非线性弹性的方法的超声波探头和微型计算机。
附图说明
[0106]
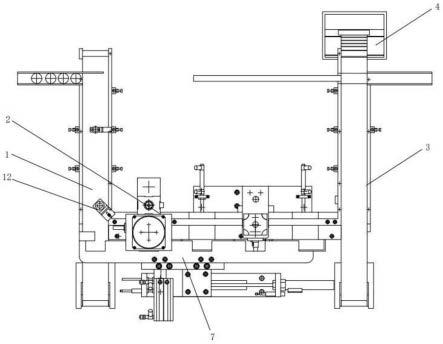
图1是根据本发明的一个实施例的超声波成像设备的示意图。
[0107]
图2a、2b和2c示意性示出了根据本发明的方法的示例,尤其是对介质施加连续变化的示意性变形的方法的示例。
[0108]
图3a、3b和3c示意性示出了当应用根据本公开的方法时的设备用户界面屏幕。
[0109]
图4示意性示出了根据本公开的经改善的方法的逻辑图。
具体实施方式
[0110]
在出于示意目的提供的各幅图中,相同的附图标记指示相同或相似的元件。
[0111]
图1所示的成像设备1旨在提供粘弹性介质2的图像,该介质对于超声压缩波是扩散介质,并且在医学应用的情况中可以例如是活体,例如病人的身体的一部分(乳房、肝脏、腹部等等)。成像设备1还适于研究弹性剪切波的传播,以提供介质2的弹性图像。
[0112]
例如通过使超声压缩波从介质2的外表面3发射到介质2中的微型计算机4(其包括至少一个输入界面4b,例如键盘或相似设备,和至少一个输出界面4a,例如屏幕或相似设备)或任何其它电子中央单元,来产生介质的图像,其中超声压缩波与包含在介质2中的扩散颗粒5相互作用,这些颗粒对于超声压缩波是反射性的。颗粒5可以由介质2的任何异质性构成,对于医学应用,尤其由存在于人体组织中的胶原蛋白颗粒构成(这些颗粒形成回波图像中的所谓“散斑”的点)。
[0113]
为了观察介质2并生成介质的图像,使用抵着被观察的介质2的外表面3布置的超声波探头6。该探头沿着z轴,以例如0.5至100mhz、优选地0.5至15mhz、例如大约为4mhz的频率,发送回波成像中常用的那种压缩超声波脉冲。
[0114]
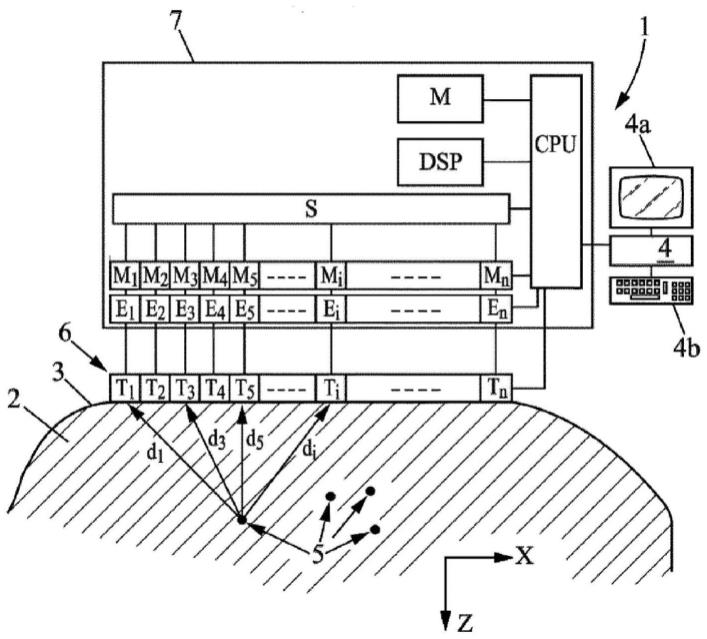
超声波探头6由n个超声波换能器t1、t2、
……
、ti、
……
、tn组成的阵列构成,n是大于或至少等于1的整数。
[0115]
该探头6的形式可以例如是可包括例如n=128个的沿着垂直于z轴的x轴排齐的换能器的线性阵列。所涉及的探头还可以是换能器的二维阵列(平面或非平面的)。
[0116]
换能器t1、t2、
……
、tn可以彼此独立地由微型计算机4,可能地通过中央处理单元(cpu)来控制,该中央处理单元例如被容纳在通过柔性线缆连接到探头6的电子机箱7中。
[0117]
因此,换能器t1至tn可选择性地发射:
[0118]-要么,“平面的”超声压缩波(在此即为波前在xz平面中是直的的波),或任何照明介质2中的整个观察场的其它类型的非聚焦波,例如通过使各个换能器t1至tn发射随机声
信号而生成的波,
[0119]-要么,聚焦在介质2的一个或更多个点上的超声压缩波。
[0120]
us 2009/234230提出一种合成成像技术,其使用多个非聚焦压缩波,例如不同角度的平面波类型的波,并将这些平面波的返回波组合,以非常快速地获得具有改善的质量的介质图像。
[0121]
根据本发明的成像设备1和方法实施介质的剪切波非线性弹性的量化。为了开始该方法,可以激活非线性剪切波弹性(英语为“non-linear shear wave elasticity,nl-swe”)的第一成像模式。
[0122]
nl-swe模式的方法使用超声波方法来确定介质的剪切波弹性(swe)。
[0123]
有利地,该方法(即分别的数据采集或扫描)可以与超声波方法同时地组合和/或交错,以实时或几乎实时地观察变形的演变。
[0124]
以下详细地解释这三种超声波方法的详细示例。swe方法和应变方法可以基于平面超声波,而b模式方法可以基于非平面超声波。
[0125]
作为用于确定静态弹性(应变)的超声波方法的替代或者额外地,探头还可配备有压力传感器,以观察(或跟踪)介质的变形的演变。
[0126]
图2a至2c提供根据本发明的方法,尤其是将连续变化的示意性变形施加给介质的方法的一个示例。
[0127]
在该示例中,该方法起始于图2a所示的状态,并终止于图2c所示的状态。特别地,图2a至2c示出了通过对介质施加连续变化的变形所导致的介质的变形的演变。成像设备1同时实施根据本发明的对介质的剪切波非线性弹性的量化。
[0128]
该方法可持续数秒,例如5至10秒。该时间对于在介质的变形的演变期间采集足够的数据(即足以在该演变期间量化介质的非线性剪切波弹性)是有用的。
[0129]
可以通知用户倒计时,使得他/她准备好通过探头或任何其它装置给组织施加变形。
[0130]
图2a至2c示出的变形仅是示意性的。如参照图3a至3c所解释的,通过预定的变形序列,预先确定根据本公开施加的变形水平。
[0131]
图2a示出了成像设备1在方法的时间t0时的使用,探头6在外表面3上施加不大的或为零的外部压强p。外表面3保持大致水平(在x方向上)。介质的图像i0包括例如相对于外表面3深度为z1处的包含物2i。同时,启动用于量化介质的非线性剪切波弹性的超声波方法(如上所述)。
[0132]
图2b示出了成像设备1在方法的时间t1时的使用,所施加的外部压强p’(或应力)大于p,该外部压强使外表面3在z方向上向着介质2的内部变形。由此,介质的变形已经被连续改变了。
[0133]
图2c示出了成像设备1在方法的时间t2时的使用,外部压强p”比在t1时施加的p’还大。
[0134]
可以以连续且渐进的方式实施如图2a至2c所示的相继压缩。这由于实时或几乎实时地观察实际变形的演变而是可行的。可替代地,可对构成介质的组织进行相继的压缩解除。
[0135]
如前所述,图2a至2c所示的变形的演变不是随机的,而是通过预定变形序列而预
先确定的。例如,该序列可以在设备1的用户界面的屏幕4a上例如以图形方式向用户示出,从而允许用户在该方法的每个时刻施加正确的压强。例如,在相同图上的指示待施加的压强以及测得的所施加的压强的光标显示,或用于给用户指示他是否正在遵循预定序列的探头振动。还可以使变形的施加自动化,例如通过使用根据预定序列自动地移动探头的机械臂。
[0136]
图3a至3c示出设备用户界面在根据本公开的方法期间的屏幕4a的示例。例如,图3a至3c可对应于图2a至2c中的时刻t0至t2。
[0137]
屏幕4a可以显示用于示出至少一幅超声波图像的域41。例如,该图像可以是在开始所述方法之前,即在t0之前,获取的介质中的关注区域的图像(例如剪切波弹性(swe)图像)。在时刻t2之后,域41可显示示出根据本发明的介质的非线性弹性水平的图像。
[0138]
屏幕4a还示出域42。在所述方法期间,所述域42显示当前的估计的实际变形水平(例如用十字形或点o)和目标变形水平(例如用球形或圆圈c)。
[0139]
估计的实际变形o对应于当前尤其是实时地观察到的变形,,并且目标变形c根据预定变形序列尤其是实时地连续变化。在所述方法期间,目标c可以在域42中连续地演变,以在每个时刻显示预定变形序列的演变,由此引导用户。
[0140]
图3a可对应于图2a的状态,因此对应于时刻t0。由此,探头6在外表面3上施加不大的或为零的外部压强p。由此,当前的估计的实际变形水平o和当前的目标变形水平c两者都为零。
[0141]
图3b可对应于图2b的状态,因此对应于时刻t1。因此,探头6在外表面3上施加增大的外部压强p。在该示例情境中,在估计的实际变形o与当前的目标变形水平c之间存在水平差异。在该示例中,当前的估计的实际变形水平o低于当前的目标变形水平c。即,通过目标c引导用户,以进一步增大压强。
[0142]
图3c可对应于图2c的状态,由此对应于时刻t2。因此,探头6施加比t1时的p’更高的外部压强p”。由于t2对应于预定变形序列的结束,当前的估计的实时变形水平o和当前的目标变形水平c两者都处于预定变形序列的最大值。
[0143]
可选地,在时刻t2停止或冻结成像。有利地,这允许用户关注预定变形序列,直至t2,无需人工地停止成像。
[0144]
在时刻t2或之后,或在数据获取期间,设备1量化介质的非线性弹性,该非线性弹性根据所述时间序列的数据和在时刻t0至t2期间所观察的变形演变来计算。用户界面可在域41上显示根据所量化的非线性弹性确定的介质的非线性弹性的图像。可选地,设备1可保存在时刻t0至t2期间采集的所述时间序列的数据(或图像)。该步骤可包括预定的数据计算和测量。而且,屏幕4a可在用户界面上显示该时间序列的图像。
[0145]
在显示图像之后,可以有一个根据用户的偏好(与其它图像重叠、b模式等)调整显示参数、改变单位、改变颜色代码的步骤。例如,可在没有单位的显示(这更易于解读)与带有单位(例如kpa)的显示(这对于与科学文献一起使用以解读数值,会是有益的)之间转换。可通过任何方式,例如人工智能,通过统计算法,实施这些分析。
[0146]
而且,设备可涉及超声波成像和/或剪切波弹性(swe)成像和/或乳房照相术的第二模式。因此,可在使用nl-swe模式之前,或在之前的独立期间,激活该模式。在该模式中,设备可通过在介质中施加剪切波而不根据预定变形序列施加变形,确定介质的至少一幅剪
切波弹性图像。可保存图像,可选地包括预定的图像计算和测量。然后,用户可确定图像中的关注区域(roi),以根据第一nl-swe模式对该区域的非线性弹性进行成像。
[0147]
图4示意性地示出了根据本公开的经改善的方法的逻辑图。该方法尤其包括对于所采集的数据的质量标准。
[0148]
该方法可重复多个周期t。由此,该方法可持续包括多个周期t的可变时长。该可变时间或时长和/或周期数量可以预定并根据所获取的数据的质量调整(如下所述)。可重复该方法,直至满足以下条件中的一个:所确定的质量参数不超出低于第一最小质量阈值的第二最小质量阈值,和/或已经实施了最大数量的重复,和/或已经实施了最小次数的对介质的非线性弹性的量化。
[0149]
在步骤1中,用户将探头放置在介质的表面上。在步骤2中,激活扫描或成像模式。该模式尤其包括剪切波弹性(swe)成像和静态弹性(应变)成像,在其期间,探头通过对介质逐渐地压缩或逐渐地解除压缩,根据预定变形序列施加变形。步骤2的扫描可在所述方法的可变时间期间持续。
[0150]
在步骤3.1中,用探头采集一时间序列的对在介质中生成的剪切波成像的超声波数据,该超声波数据允许得出剪切波弹性(swe)e
t
。该步骤可以对应于根据本公开的步骤a1。特别地,对于步骤2中的扫描期间的每个周期t,可采集剪切波速度的当前测量值的杨氏模量e
t
。
[0151]
在步骤3.2中,使用探头采集介质的一时间序列的静态弹性数据,以推导介质的静态弹性δε
t
。该步骤可以对应于根据本公开的步骤a1’。特别地,对于步骤2中的扫描期间的每个周期t,通过比较当前图像和历史图像,推导出即时静态(拉格朗日)弹性δε
t
。例如,通过比较从介质接收的射频回波的当前(t)和之前(t-1)的rf回波数值,确定静态弹性。
[0152]
所述时间序列的静态弹性数据δε
t
可包括一时间序列的静态弹性数值(尤其是每个周期t有一个数值),和/或所述时间序列的剪切波弹性数据et包括一时间序列的剪切波弹性数值(尤其是每个周期t有一个数值)。
[0153]
在步骤5中,通过对静态弹性δε
t
进行积分,计算总静态(轴向)弹性ε
t
。该总静态弹性ε
t
被发送到定性器(见步骤4)。该总静态弹性ε
t
还用于在步骤7中确定实际变形和/或更新探头位置指示器(即图3a至3c中的当前的估计的实际变形水平o)。这些步骤5和/或7可以对应于根据本公开的步骤a3。
[0154]
在步骤4中,量化所采集的数据的质量。特别地,确定质量参数。可以根据质量参数调整预定变形序列,和/或如果所确定的质量参数不超过最小质量阈值(即第一质量阈值),则可以中断或暂停预定变形序列。例如,在所确定的质量参数不超出最小质量阈值的情况下,不使用当前数值,在接下来的周期t 1中,基于剪切波弹性的未来数值e
t 1
、静态弹性的未来数值δε
t 1
和总静态弹性的未来数值ε
t 1
,再次测量质量。
[0155]
如果在步骤4中,所确定的质量参数超过第一最小质量阈值,则将剪切波弹性和总静态弹性的当前数值报告为是合格数值et*和并使用这些数值来量化介质的非线性弹性。以下在选项1至3中提供对质量参数的可行的确定方式的非穷尽的描述。
[0156]
在步骤9中,可以将质量和/或质量参数呈现为示出质量水平的图像、分数,和/或符号。特别地,质量的结果可以呈现为布尔数值(例如具有红色或绿色和可选地具有用于细节的其它颜色(例如橙色)的交通灯,和/或笑脸),度量尺(例如从0至10)上的数字指示器,
和/或对要用探头实施的运动的指示(例如具有根据质量参数调整的长度和/或宽度的箭头)。
[0157]
由此,可以根据质量参数,给用户呈现反馈信息(见步骤10)。例如,在所获取的数据的质量不可接受(例如质量参数不超过预定质量阈值)的情况下,告知用户继续扫描,并且将再次测试未来数据(t 1)。这些步骤4和/或9可以对应于根据本公开的步骤a6。
[0158]
在步骤6中,使用总静态弹性的合格数值和剪切波弹性(swe)的合格数值来计算非线性剪切波弹性μ
nl,t
(nl-swe)。
[0159]
在步骤8中,使用μ
nl,t
数值来更新非线性剪切波弹性(nl-swe)的信息,例如swe-nl地图。该信息也可呈现为例如显示介质的非线性弹性水平的图像、分数,和/或符号。可对于每个周期t,在扫描期间,实时或几乎实时地进行更新。特别地,可以用每个μ
nl,t
数值,即在每个周期t中,细化nl-swe地图。步骤8可以对应于根据本公开的步骤c。
[0160]
在步骤10中,对于每个周期t,在扫描期间,尤其实时或几乎实时地将反馈信息呈现给探头用户。该信息可包括在步骤7中更新的实际变形、在步骤4中更新的质量参数,和/或在步骤8中更新的非线性剪切波弹性(nl-swe)的信息。步骤10可以对应于根据本公开的步骤d。
[0161]
以下提供对质量参数的可行确定方式的非穷尽描述。这些确定方式可以单独地或组合地使用。
[0162]
选项1:通过静态弹性来定性(qualification)
[0163]
可以根据总静态弹性的当前数值ε
t
和先前数值的比较结果,确定质量参数。特别地,可根据当前数值ε
t
是否超过总静态弹性的先前数值第一差值阈值,确定质量参数。在该情况中,将剪切波弹性和总静态弹性的当前数值报告为是合格数值et*和并将其用于量化介质的非线性弹性。目标c(见图3a至c)可向提高的变形水平移动。
[0164]
该预定阈值可以在时刻t固定,或可以根据预定函数计算(例如实时地)。
[0165]
可选地,如果先前数值超过当前的数值ε
t
,例如增加了第二差值阈值(即没有达到低于第一质量阈值的第二质量阈值),则可以停止用于量化非线性弹性的方法(例如扫描),并可选地,可将错误和/或表明方法终止的讯息提示给用户。
[0166]
在上述描述中,认为用户在扫描期间施加连续压缩。然而,还可行的是,用户在扫描期间施加连续的压缩解除。换句话说,用户在开始扫描之前根据第一压缩水平施加压缩,然后在扫描期间解除压缩。在该情境中,使用阈值将当前的数值ε
t
与先前数值比较的方法被相应地颠倒过来。当达到第二预定压缩水平(低于第一压缩水平)时,可停止扫描。可选地,表明所述方法已完成的讯息可以被提示/呈现给用户。第一压缩水平可以是用户自由选择的(即由所施加的最大压强水平限定)和/或可以是由所述方法预先限定的(例如,通过指明目标压强水平)。第二压缩水平可以被固定,或可以根据预定函数来选择,例如取决于第一压强水平,和/或取决于是否采集了足以量化非线性弹性的数据。
[0167]
选项2:通过工作流程来定性
[0168]
还可以根据预定时长来确定质量参数,其中,由总静态弹性ε
t
代表的估计的实际变形水平尤其以预定公差对应于目标变形水平。由此,如果在该时长期间,探头位置对应于
目标c的位置(见图3a至c)(即达到第一质量阈值),则剪切波弹性和总静态弹性的当前数值被报告为是合格数值et*、并被用于量化介质的非线性弹性。在步骤10中,可例如通过在质量指示器上显示某种颜色,将该结果告知用户。目标c可以向提高的变形水平移动。
[0169]
相反,如果探头没有达到目标的位置,则目标可保持在其水平处。如果探头在比预定时长更长的时期内没有达到目标的位置(即没有达到低于第一质量阈值的第二质量阈值),则可停止用于量化非线性弹性的方法(和/或扫描),并且可选地,可将错误和/或指明该方法已经终止的讯息提示给用户。
[0170]
预定时长可包括至少一个周期t,并有利地比所述方法的可变时间更短。例如,预定时长可以不到一秒(例如30ms至100ms),而所述方法的可变时间可持续数秒。如果预定时长包括多个周期t,则在各周期期间,可以仅实施步骤1至4,而步骤6至10则仅在之后才实施。预定时长可以是固定的,也可以根据预定函数调节。
[0171]
而且,用于量化非线性弹性的方法(和/或扫描)的可变时间可在最大极限之后,自动地停止。
[0172]
在此背景下,要指出的是,观察扫描的时长是有益的,这是因为介质可能会被波加热。因此,期望在最大时长之后停止所述方法和/或快速地完成数据获取。
[0173]
在选项2的情境中,用户在扫描期间自由地施加压缩和/或解除压缩也是可以的。在该情况中,预定变形序列可以实施为一个或更多个压缩水平。例如,所述方法可设置最小阈值水平和最大阈值水平。
[0174]
选项3:通过即时测量来定性
[0175]
如果当前数值的、尤其是剪切波弹性的当前数值(et)和/或静态弹性的当前数值(δε
t
)的熵处于预定范围内(即如果该熵被限定在预定区间内,和/或如果达到第一阈值),则也可以确定质量参数。
[0176]
在该情况中,剪切波弹性和总静态弹性的当前数值被报告为合格数值et*和并被用于量化介质的非线性弹性。在步骤10中,可例如通过在质量指示器上显示某种颜色,将该结果告知用户。目标c可向提高的变形水平移动。
[0177]
仅当先前数值不超过当前的数值ε
t
,例如增加了第二差值阈值(即没有达到低于第一质量阈值的第二质量阈值),选项3的测试才可具有前提条件。在该情况中,可停止用于量化非线性弹性的方法(例如扫描),并可选地,可将错误和/或表明所述方法已经结束的讯息通知给用户。
[0178]
在“b模式”中确定介质的图像ik[0179]
下述方法已知被称为“b模式”成像。所示时间序列的b模式数据(或图像或图像数据)可用于计算当施加连续变化的变形时(如上所述),介质相对于探头的运动补偿。
[0180]
为了生成介质的图像(i),成像设备实施例如以下步骤:
[0181]
(i1)微型计算机4使探头6将至少一束非聚焦超声压缩波发射到粘弹性介质中,
[0182]
(i2)微型计算机4使探头6实时地检测和保存从粘弹性介质2接收的声信号,该声信号包括由非聚焦超声压缩波通过与粘弹性介质的反射颗粒5相互作用而生成的回波,和
[0183]
(i3)处理步骤,在该步骤中,微型计算机4处理在子步骤(i2)中从粘弹性介质2接收的声信号,以确定基质的一幅或更多幅图像(i)。
[0184]
非聚焦超声压缩波以非常高的传播速度,例如在人体中大约1500m/s,在介质2中传播,并与反射颗粒5相互作用,这生成回波或其它相似的信号干扰(其自身在回波成像领域已知被称为“散斑噪声”)。
[0185]
在发射非聚焦超声压缩波之后,在子步骤(i2)期间,这些“散斑噪声”被换能器t1、
……
、tn捕获到。被每个换能器ti如此捕获的信号si(t)首先实时地在高频率(例如30至100mhz)下被属于机箱7、连接到该换能器的采样器(分别是e1、e2、
……
、en)采样并数字化。
[0186]
然后,同样实时地,将如此采样和数字化的信号si(t)存储在属于机箱7、专用于换能器ti的存储器mi中。
[0187]
每个存储器mi具有例如大约128mb的容量,并包含接收到的所有信号si(t)。
[0188]
在保存了所有信号si(t)之后,通过对应于子步骤(i3)的常规的路径形成过程,中央处理单元(cpu)让属于机箱7的加和电路s再次处理这些信号(或它自己实施该处理,或所述处理可在微型计算机4中实施)。
[0189]
由此生成信号s(x,z),这些信号每个对应于在非聚焦超声波发射之后的介质观察场的图像。
[0190]
例如,可以使用以下公式计算信号s(t):
[0191]
【数学.2】
[0192][0193]
其中:
[0194]
si是第i号换能器在超声压缩波发射之后感知到的原始信号,
[0195]
t(x,z)是超声压缩波到达观察场中坐标为(x,z)的点所花的时间,在发射开始时,t=0,
[0196]
di(x,z)是观察场中坐标为(x,z)的点与第i号换能器之间的距离,或该距离的近似值,
[0197]
v是超声压缩波在所观察的粘弹性介质中的平均传播速度,和
[0198]
αi(x,z)是考虑到变迹法则(lois d'apodisation)的加权系数(在实践中,在许多情况下,可认为αi(x,z)=1)。
[0199]
当观察场是三维的(换能器的二维阵列)时候,上述公式比照适用,用空间坐标(x,y,z)代替(x,z)平面的空间坐标。
[0200]
在形成路径的可选步骤之后,中央单元cpu将对应于最后一次发射的图像信号s(x,z)存储到属于机箱7的中央存储器m中。这些信号还可存储在微型计算机4中,以便其自己计算介质的图像(i)。
[0201]
存在用于生成介质的图像(i)的其它技术,例如合成成像技术。可以使用能够获得介质的图像的任何成像技术。优选地,使用能够高速获得图像的技术。
[0202]
确定静态弹性(应变)
[0203]
下述方法已知被称为静态弹性(应变)成像。所述时间序列的静态弹性(应变)数据(或图像或图像数据)可用于观察估计的实际变形演变(如上所述)。
[0204]
可通过关联,有利地通过两两之间、即在编号为k的介质的图像ik与编号为k-1的
介质的图像i
k-1
之间的相互关联,处理介质的图像ik。
[0205]
相互关联可例如在属于机箱7的专用电子电路dsp中实施,也可编程到中央单元cpu或微型计算机4中。
[0206]
在该相互关联的过程中,最大化相互关联函数《s
k-1
(x,z),sk(x,z)》,以确定导致超声波回波的每个颗粒5所经历的位移。
[0207]
在现有技术中,尤其是在以下文献中,提供了这样的相互关联计算的示例:
[0208]
‑“
internal displacement and strain imaging using speckle tracking,”o’donnell et al,ieee transactions on ultrasonic,ferroelectrics,and frequency control,第41卷,第3期,1994年5月,第314-325页,
[0209]
‑“
elastography:a quantitative method for imaging the elasticity of biological tissues,”ophir et al.,ultrasonic imaging,第13卷,第111-134页,1991年,和
[0210]
‑“
pyramidal implementation of the lucas kanade feature tracker.description of the algorithm,”j-y bouguet,intel corp.
[0211]
由此获得位移场,即介质2的每个位置(x,z)处的位移矢量u(x,z,t)集,通过用图像编号k代替时间变量t,可以将其记为uk(x,z)。这些位移矢量可以可选地缩减为单个分量或两个或三个分量。在所考虑的示例中,图像编号k的位移场uk是:
[0212]
【数学.3】
[0213][0214]
该位移场(位移矢量集)存储在存储器m中或微型计算机4中。
[0215]
可以创建位移场的图像iuk,并且尤其是借助于微型计算机的屏幕4a,可以可视化对应于所述时间序列的介质图像的所有位移场图像iuk,例如以慢动作电影的形式,在慢动作电影中,位移数值通过光学参数,例如通过灰度水平或通过颜色水平来示出。
[0216]
确定偏应变图像iδεk[0217]
然后可计算介质2的每个点处的偏应变(d
é
formation partielle)δε,即这样的矢量:该矢量的分量是位移矢量的分量分别对空间变量(在所考虑的示例中为x,z坐标)的导数,即:
[0218]
【数学.4】
[0219][0220]
可能地,根据一个实施例,仅计算z方向上的单轴向应变/偏应变。实际上,与探头的外部压强相关的压缩主要在该方向上。同样地,在之后的应力计算中,可能仅计算z方向上的单轴向应力/偏应力。这简化了计算。
[0221]
如对于位移矢量那样的,可基于在x-z平面(图像平面)的坐标为(x,z)的任何点计算的偏应变集,创建偏应变图像(iδεk)。
[0222]
可将这些偏应变矢量或偏应变图像(iδεk)可视化,尤其是通过微型计算机的屏
幕4a,以慢动作电影的形式。
[0223]
确定由外部压强造成的介质运动
[0224]
介质2的由于施加在外表面3上的外部压强p的变化造成的变形是缓慢的、弹性的、几乎均匀的变形。该变形在粘弹性介质2中传播,导致包含在介质2中的元素和颗粒5移动。
[0225]
由外部压强p导致的外部变形可以视为引起介质编号为k的图像(ik)与介质编号为k-1的先前图像(i
k-1
)之间的运动。
[0226]
于是可通过介质编号为k的图像与介质编号为k-1的先前图像之间的位移场(uk)来确定该运动。
[0227]
特别地,可用编号为k的几何转换tk对该运动建模,其中几何转换tk一般性地且简单地(即以非常少数量、例如小于十个的参数)代表图像编号为k的步骤的位移场的所有位移。
[0228]
根据第一变型,几何转换tk包括平移,如从图2a到图2b所示。
[0229]
根据第二变型,几何转换tk包括平移和位似(homoth
é
tie)。
[0230]
根据第二变型,几何转换tk包括平移、位似和转动。
[0231]
由此,在x-z平面、即图像平面中,可以如下地以矩阵形式表示几何转换:
[0232]
【数学.5】
[0233][0234]
其具有以下的几何转换(tk)参数:
[0235]
t
x
、ty是图像平面中的平移系数,
[0236]hx
、hz是图像平面中的位似系数,以及
[0237]
θ是垂直于图像平面的轴线的转动角度。
[0238]
由此,如果取图像的坐标分别为(x1,z1)、(x2,z2)、(x3,z3)的三个点p1、p2和p3,则获得以下关系式:
[0239]
【数学.6】
[0240][0241][0242]
其中,
[0243]
dx1=u
x1
ꢀꢀ
dz1=u
z1
[0244]
dx2=u
x2
ꢀꢀ
dz2=u
z2
[0245]
dx3=u
x3
ꢀꢀ
dz3=u
z3
[0246]
以重新采用点p1、p2和p3的位移矢量的x和z分量的标记。
[0247]
而且,有关系式可以基于之前的矩阵a和b计算几何转换tk,即矩阵a对应于图像中三个点的坐标,矩阵b对应于这三个点加上其位移(运动)后的坐标。由此,通过矩阵b和矩阵
a的逆矩阵的矩阵乘积,获得几何转换的矩阵:
[0248]
【数学.7】
[0249]
tk=b.a-1
[0250]
应用该关系式能够基于三个点p1、p2、p3计算几何转换tk。
[0251]
反过来,一旦建立了几何转换tk,该关系式能够通过以下逆关系式知悉任何点p的坐标(x,z):
[0252]
【数学.8】
[0253]
b=tk·a[0254]
由此,可通过之前的几何转换的矩阵相乘,即通过编号i为1至k的几何转换ti的矩阵相乘,实现基于之前的运动对任何类型图像的补偿。
[0255]
用3个点建立的前述关系式可一般化至图像的点集,该点集包括图像的3、4、5或6个点。点集包括图像的三个至十个点。
[0256]
此外,在一个变型中,有利地采用图像的三个点(点集)的群,所述群包括数量为ng的点集,该数量数值大。例如,该群的大小、即点集的数量ng,大于一百。
[0257]
由此,通过基于图像的点集的群计算的参数的中位数值,获得几何转换tk的参数。
[0258]
特别地,该技术可应用于位移场uk的图像,以由之得出编号k的介质图像与编号k-1的介质图像之间的运动。
[0259]
得益于使用了点集的群,可确定更整体性地代表编号k的介质图像与编号k-1的介质图像之间的运动的几何转换。
[0260]
有利地,在图像中随机地选择每个集中的点。得益于该设置,可确定更整体性地并且更可靠地代表图像之间的运动的几何转换。
[0261]
确定介质的剪切波弹性图像iek[0262]
下述方法已知被称作介质的剪切波弹性成像。可使用所述时间序列的剪切波弹性数据(或图像或图像数据)来量化介质的非线性弹性(如上所述)。
[0263]
us 2005/252295提出一种粘弹性介质2的弹性成像技术:成像设备1研究弹性剪切波在该介质中的传播。弹性剪切波的运动由上述装置,尤其是由微型计算机4,来监控。
[0264]
分以下多个步骤进行:
[0265]
(e1.1)激励步骤,在该步骤期间,微型计算机4通过用探头6将至少一束聚焦超声波发射到粘弹性介质中,在粘弹性介质2中生成弹性剪切波,
[0266]
(e1.2)观察步骤,在该步骤期间,在粘弹性介质2的观察场的多个点处,同时观察剪切波的传播,该步骤包括一些子步骤,在这些子步骤期间,生成介质的多幅在时间上相继的中间图像ii
j,k
,其中j是包含在0至m(包括端值)之间的中间图像编号,m 1是所产生的中间图像的数量。
[0267]
介质的每幅中间图像例如通过上述确定介质的图像ik的方法生成,其中,由探头6发射至少一射束非聚焦超声压缩波,探头6检测和保存接收到的声信号,并且处理这些声信号以建立介质的中间图像(ii
j,k
)。
[0268]
在步骤e1发射的聚焦超声波的聚焦和时机,以及在步骤e2发射的非聚焦超声波的时机,被调整为使得非聚焦超声波在剪切波在观察场中传播期间,到达该观察场。由此,剪切波在所生成的介质的中间图像ii
j,k
中可见。
[0269]
然后进行:
[0270]
(e1.3)处理步骤,在该步骤中,处理介质的中间图像,以确定介质的弹性图像iek。
[0271]
处理介质的中间图像ii
j,k
,以例如通过如上所述的关联或相互关联,计算位移场u
j,k
。例如通过介质的编号为j的中间图像(ii
j,k
)与介质的编号为j-1的中间图像(i
j-1,k
)之间的相互关联。所确定的位移矢量可用于将剪切波的传播以电影的形式可视化。而且,可能还基于位移场来计算介质2的每个点处的偏应变δε。
[0272]
基于位移场或应变场,微型计算机4然后可有利地进行制图步骤,在该步骤期间,要么在观察场的某些选择的点处,要么在整个观察场中,基于观察场中的运动参数(位移或偏应变)随时间的演变,计算至少一个剪切波传播参数。
[0273]
于是可创建弹性图像iek,其对应于在观察场的各个点处的剪切波的传播参数的集合。
[0274]
可以可视化介质的该弹性图像iek,尤其是通过微型计算机的屏幕4a,在该屏幕上通过例如灰度水平或通过颜色水平的光学参数,示出传播参数的数值。
[0275]
在制图步骤中计算的剪切波的传播参数选自例如:
[0276]-剪切波的速度cs,或
[0277]-剪切模量μ,或
[0278]-杨氏模量e=3μ,或
[0279]-剪切波衰减α,或
[0280]-剪切弹性μ1,或
[0281]-剪切粘性μ2,或
[0282]-介质的组织的机械放松时间τs。
[0283]
例如,可计算观察场不同点处的:
[0284]-剪切波的速度数值cs,其允许获取组织的硬度,
[0285]-组织的机械放松时间τs的数值,其表征介质的局部粘性。
[0286]
为此,使用剪切波的传播模型,例如由如下的传播方程代表,由剪切波在介质的每个位置r处产生的位移u遵循该传播模型:
[0287]
【数学.9】
[0288][0289]
其中:
[0290]
ρ是组织的密度,
[0291]
τs是组织的机械放松时间,以及
[0292]
cs是剪切波的速度,它通过以下关系式与组织的杨氏模量e直接相关:
[0293]
【数学.10】
[0294][0295]
用所有位移u对该传播方程求解就能获得上述传播参数(cs,τs)。
[0296]
也可以其他变型来计算一个或多个传播参数。特别地,例如通过对频带上的数值
取平均,可使用傅里叶域中的波方程。还可使用偏应变代替位移。
[0297]
还可用不同的剪切波建立传播参数图、即弹性图像。然后可将它们组合、例如通过对其取平均值,以获得更加精确的图。
[0298]
剪切波在介质2中的传播速度足够大,大到可以视为在取得介质的多个图像(中间图像)以确定弹性图像ie(剪切波的传播参数)的过程期间,施加在外表面3上的外部压力p没有变化。由此,介质的这些图像不用通过介质的运动来修正。
[0299]
相反地,介质的弹性图像iek必须用所考虑的时刻或与之接近的时刻的运动(编号k代表的)来修正,从而能够与介质的初始图像i0比较,或从而能够与修正的应变图像i
εk
*比较。
[0300]
确定非线性参数图像inlk[0301]
在线性弹性域中,介质2与应力成比例地变形,并遵循胡克定律:
[0302]
【数学.11】
[0303]
σ=e0·
ε
[0304]
其中:
[0305]
e0是线性域的杨氏模量,以及
[0306]
ε是应变。
[0307]
在非线性域中,该成比例性不再成立。在大多数情况下,介质2中的材料的杨氏模量e随着压缩而增大。
[0308]
弹性模量或杨氏模量e则被定义为应力-应变曲线的斜率,即:
[0309]
【数学.12】
[0310][0311]
其中:
[0312]
e是杨氏模量,
[0313]
δσ是局部应力的变化,即偏应力,
[0314]
其中,δε
t
是相对于时刻t-δt的、在时刻t量化的静态弹性,由此,δε是局部应变的变化,即对于趋向于零的δt的偏应变δε
t
。
[0315]
弹性的非线性参数可以例如是在以下文献中提及的称作三阶弹性剪切模量的朗道系数a:
[0316]
‑“
acoustoelasticity in soft solids:assessment of the nonlinear shear modulus with the acoustic radiation force,”gennisson and al.,j.acoust.soc.am(122),2007年12月,第3211-3219页,和
[0317]
‑“
quantitative imaging of nonlinear shear modulus by combining static elastography and shear wave elastography,”h.latorre-ossa et al.,ieee transactions on ultrasonics,ferroelectrics,and frequency control,第51卷,第4期,第833-839页,
[0318]
特别地,该后一文献中的方程(1)可重写成弹性(杨氏模量)e与应力σ之间的关系式(r1)的形式:
[0319]
【数学.13】
[0320][0321]
其中:
[0322]
e是杨氏模量或弹性模量,
[0323]
e0是线性域的杨氏模量,即没有压缩的介质的材料的杨氏模量,因此是所述时间序列的图像中的第一修正弹性图像,
[0324]
σ是应力,例如竖直方向z上的单轴向应力σz,其大致对应于由探头6的用户施加的外部压强引起的压缩,以及
[0325]
a是所追求的非线性参数。
[0326]
通过对上述关系式r1求导,获得以下公式:
[0327]
【数学.14】
[0328][0329]
用方程(eq.1)的杨氏模量的定义除这个算式然后积分,获得弹性(杨氏模量)e与应变ε之间的关系式r2,即:
[0330]
【数学.15】
[0331][0332]
其中:
[0333]
e是杨氏模量,
[0334]
e0是线性域的杨氏模量,即没有压缩的介质的材料的杨氏模量,因此是所述时间序列的图像中的第一修正弹性图像,
[0335]
ln()是自然对数函数,
[0336]
ε是应变,以及
[0337]
a是待确定的非线性参数。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。