1.本发明属于菱镁或硫氧镁生产技术领域,具体涉及一种菱镁或硫氧镁废料回收系统。
背景技术:
2.菱镁或硫氧镁板材制品在生产过程中产生的切割粉碎边料、表面砂光粉尘以及生产时产生的次品/废品在粉碎回收时,里面包含了锯末、泡沫颗粒、玻纤布、无纺布等轻重比例不同的物质。为了降低这些粉碎物料对环境的污染,现有企业通常将这些粉碎物料作为菱镁或硫氧镁板材制品的填充料进行回收利用,但是在回收利用的过程中,大多数都是在储料仓的入口就将这些粉碎物料倒入储料仓,粉碎物料要经过从储料仓入口到储料仓仓底的降落过程,粉碎物料因内含轻重比例不同的物质,重的物料先落下、轻的物料后落下,导致分层,不利于后期作为填充料使用时的物料分散均匀性,导致菱镁或硫氧镁板材制品的性能不均一。
技术实现要素:
3.为克服现有技术中存在的不足之处,本发明的目的在于提供一种菱镁或硫氧镁废料回收系统。
4.一种菱镁或硫氧镁废料回收系统,其特征在于:所述回收系统包括转运吊装装置、储料仓、称重仓、搅拌机;所述转运吊装装置包括筒体和倒u形龙门架;筒体底部封闭、顶部敞口,筒体内腔贴合底壁左右间隔、前后向固定设置有两个互相平行的倒u形槽,倒u形槽的前后端部与筒体的前后侧壁固定连接并且筒体的前后侧壁上开设有与两个倒u形槽一一对应的缺口,筒体的左右侧壁上在筒体中下部位置偏离筒体的中心轴线对称固定设置有一对吊装轴;倒u形龙门架的横梁侧壁活动连接有f形限位杆,倒u形龙门架的两侧边底部向上弯曲呈u形钩并且u形钩的大小与吊装轴相适配,所述f形限位杆包括限位杆本体以及与其一端同侧固定连接的两个限位块,f形限位杆的两个限位块卡在筒体顶部边沿的里外两侧,倒u形龙门架通过两个u形钩钩住吊装轴吊装在筒体上方;储料仓、称重仓、搅拌机均为上进料下出料式,储料仓、称重仓、搅拌机依次通过多个密封蛟龙输送机串连,储料仓在其出料口侧壁位置连接有第一空气炮,称重仓在其出料口侧壁位置连接有第二空气炮,称重仓在其出料口上方的侧壁位置连接有称重模块,称重仓的出料口设有气动蝶阀。
5.较好地,储料仓包括储料仓本体以及与其底部一体成型的出料口,储料仓本体的横截面为长方形,出料口为上宽下窄的锥形结构并且出料口底端面的宽度小于储料仓本体的宽度、长度等于储料仓本体的长度。
6.较好地,储料仓的出料口底端密封连接有与出料口长度相适配的第一密封蛟龙输送机,第一密封蛟龙输送机的中心轴线平行于储料仓本体的长度方向;第一密封蛟龙输送
机靠近储料仓的一端连接有第一驱动电机,另一端密封连接有第二密封蛟龙输送机,第二密封蛟龙输送机靠近第一密封蛟龙输送机的一端连接有第二驱动电机,另一端密封连接至称重仓顶部的进料口;称重仓底部的出料口密封连接有第三密封蛟龙输送机,第三密封蛟龙输送机靠近称重仓的一端连接有第三驱动电机,另一端密封连接至搅拌机顶部的进料口。
7.为了实现更高程度的自动化,较好地,所述回收系统还包括自动电控系统,所述自动电控系统包括电脑、plc控制器、变频器、延时器、继电器、交流接触器、电压过度保护器;第一驱动电机、第二驱动电机、第三驱动电机、第一空气炮、第二空气炮、称重模块、气动蝶阀、搅拌机内的搅拌器分别与自动电控系统电连接。本发明中,自动电控系统为现有技术,自动电控系统中各个元件之间的连接关系也按现有技术连接。
8.当筒体厚度正好和两个限位块之间的缝隙相适配时,f形限位杆的两个限位块正好可以卡在筒体顶部边沿的里外两侧,但是当筒体厚度远小于两个限位块之间的缝隙时,f形限位杆的两个限位块就不能很好地起到限位作用,此时,优选筒体顶部贴合筒体内侧壁固定设有一圈限位环,限位环的顶部与筒体的顶部平齐,筒体侧壁厚度 限位环的厚度之和与两个限位块之间的缝隙相适配,两个限位块则分别卡在筒体外侧和限位环里侧。本发明中,“筒体厚度和两个限位块之间的缝隙相适配”以及“筒体侧壁厚度 限位环的厚度之和与两个限位块之间的缝隙相适配”中的相适配是指当需要限位时,两个限位块卡在筒体边沿的里外两侧或筒体 限位环的里外两侧,f形限位杆能够起到限位作用保证筒体平衡而不侧翻,而当不需要限位时,借助外力向上拉起f形限位杆,两个限位块可以轻松地脱离筒体或者筒体 限位环。
9.较好地,吊装轴的中心偏离筒体的中心轴线15-20mm。
10.当需要起吊本发明的吊装装置时,起重机的吊钩可以直接钩住倒u形龙门架的横梁,但为了方便起重器起吊,优选倒u形龙门架的横梁顶部中间位置固定设置有起吊钩。
11.当需要借助外力向上拉起f形限位杆时,可以直接利用拉绳绑在f形限位杆的限位杆本体上,但为了方便拉起f形限位杆,优选限位杆本体上在其靠近两个限位块的一端固定设置有拉绳环。
12.较好地,筒体内侧壁上在与两个吊装轴对应的位置平行于筒体中心轴线设有加强条。
13.较好地,吊装轴呈t形,t形的头部在外、尾部与筒体的左右侧壁固定连接,避免倒u形龙门架从吊装轴的端部上滑出脱落。
14.有益效果:本发明结构设计科学合理,其中的转运吊装装置在储料仓的仓底完成物料的倾倒,降低物料落差,防止物料比重不同导致物料的分层,从而保证后期作为填充料使用时的物料能够分散均匀,使得制备的菱镁或硫氧镁板材制品性能均一;本发明不仅适用于菱镁或硫氧镁板材制品的废料回收,同样适用于其它同时含有轻重比例不同的物质的回收。
附图说明
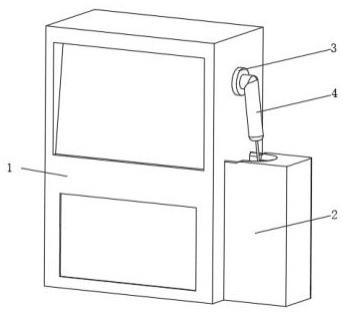
15.图1:储料仓、称重仓、搅拌机之间的连接关系示意图;图2:储料仓的右侧视图;
图3:转运吊装装置的主视结构示意图;图4:转运吊装装置的俯视结构示意图;图5:倒u形龙门架的右侧视图;其中,附图标记为:1
‑‑
筒体;2
‑‑
倒u形龙门架;3
‑‑
倒u形槽;4
‑‑
缺口;5
‑‑
吊装轴;6
‑‑
起吊钩;7
‑‑
f形限位杆,71
‑‑
限位杆本体,72
‑‑
限位块;8
‑‑
拉绳环;9
‑‑
限位环;10
‑‑
储料仓,101
‑‑
储料仓本体,102
‑‑
出料口;11
‑‑
称重仓;12
‑‑
搅拌机;131
‑‑
第一密封蛟龙输送机,132
‑‑
第二密封蛟龙输送机,133
‑‑
第三密封蛟龙输送机;141
‑‑
第一驱动电机,142
‑‑
第二驱动电机,143
‑‑
第三驱动电机;151
‑‑
第一空气炮,152
‑‑
第二空气炮;16
‑‑
称重模块;17
‑‑
气动蝶阀。
具体实施方式
16.为使本发明更加清楚、明确,以下对本发明进一步详细说明。应当理解,此处所描述的具体实施例仅仅用以解释本发明,并不用于限定本发明。
17.实施例1如图1-5所示,一种菱镁废料回收系统,所述回收系统包括转运吊装装置、储料仓10、称重仓11、搅拌机12和自动电控系统;所述转运吊装装置包括圆柱形筒体1(高度和直径均为1200mm)和倒u形龙门架2;筒体1底部封闭、顶部敞口,筒体1内腔贴合底壁左右间隔、前后向焊接有两个互相平行的倒u形槽3,倒u形槽3的前后端部与筒体1的前后侧壁焊接固定并且筒体1的前后侧壁上开设有与两个倒u形槽3一一对应的缺口4,筒体1的左右侧壁上在自底部向上1/3筒体1高度位置偏离筒体1的中心轴线20mm对称焊接固定有一对吊装轴5,吊装轴5呈t形,t形的头部在外、尾部与筒体1的左右侧壁焊接固定,筒体1内侧壁上在与两个吊装轴5对应的位置平行于筒体1中心轴线焊接有加强条(未示出);倒u形龙门架2的横梁顶部中间位置焊接固定有起吊钩6,倒u形龙门架2的横梁侧壁活动连接有f形限位杆7(f形限位杆7可以围绕横梁提起和落下),倒u形龙门架2的两侧边底部向上弯曲呈u形钩并且u形钩的大小与吊装轴5相适配,所述f形限位杆7包括限位杆本体71以及与其一端同侧焊接固定连接的两个限位块72,限位杆本体71上在其靠近两个限位块72的一端焊接固定有拉绳环8,筒体1顶部贴合筒体1内侧壁焊接固定设有一圈限位环9,限位环9的顶部与筒体1的顶部平齐,筒体1侧壁厚度 限位环9的厚度之和与两个限位块72之间的缝隙相适配,f形限位杆7的两个限位块72分别卡在筒体1外侧、限位环9里侧,倒u形龙门架2通过两个u形钩钩住吊装轴5吊装在筒体1上方;所述自动电控系统包括电脑、plc控制器、变频器、延时器、继电器、交流接触器、电压过度保护器;储料仓10、称重仓11、搅拌机12均为上进料下出料式,储料仓10包括储料仓本体101以及与其底部一体成型的出料口102,储料仓本体101的横截面为长方形,出料口102为上宽下窄的锥形结构(70
°
锥形)并且出料口102底端面的宽度小于储料仓本体101的宽度、长度等于储料仓本体101的长度,称重仓11和搅拌机12的出料口均为沉降漏斗形;储料仓10、称重仓11、搅拌机12依次通过多个密封蛟龙输送机串连:储料仓10的出料口102底端密封连接有与出料口102长度相适配的第一密封蛟龙输送机131,第一密封蛟龙输送机131的中心轴线平行于储料仓本体101的长度方向;第一密封蛟龙输送机131靠近储料仓10的一端连接有第一驱动电机141,另一端密封连接有第二密封蛟龙输送机132,第二密封蛟
龙输送机132靠近第一密封蛟龙输送机131的一端连接有第二驱动电机142,另一端密封连接至称重仓11顶部的进料口;称重仓11底部的出料口密封连接有第三密封蛟龙输送机133,第三密封蛟龙输送机133靠近称重仓11的一端连接有第三驱动电机143,另一端密封连接至搅拌机12顶部的进料口;储料仓10在其出料口102的侧壁位置连接有第一空气炮151,称重仓11在其出料口的侧壁位置连接有第二空气炮152,称重仓11在其出料口上方的侧壁位置连接有称重模块16,称重仓11的出料口设有气动蝶阀17;第一驱动电机141、第二驱动电机142、第三驱动电机143、第一空气炮151、第二空气炮152、称重模块16、气动蝶阀17、搅拌机12内的搅拌器分别与自动电控系统电连接。
18.工作过程:第一步,物料转运:使用之前,首先在拉绳环8上绑上拉绳,然后将需要转运储存的物料装入筒体1,装满之后,叉车的两个货叉插入筒体1底部的两个倒u形槽3内,叉车将转运吊装装置运到起重机下方,起重机的吊钩钩住倒u形龙门架2横梁上的起吊钩6,随着起重机的起吊,倒u形龙门架2吊起筒体1两侧的吊装轴5,移动到储料仓10上面的入口处,起重机吊钩下降,转运吊装装置顺着入口下落到储料仓10下面的仓底,操作人员借助拉绳向上拉起f形限位杆7,待限位块72脱离筒体1和限位环9之后,起重机向上提升,本发明转运吊装装置被拉起,但此时由于吊装轴5的中心偏离筒体1中心轴线,f形限位杆7也脱离了筒体1,筒体1靠自重从吊装轴5一侧向另一侧发生翻转,起重机继续提升,筒体1翻转直至筒体1的敞口向下,筒体1内轻重比例不同的物料倒出,起重机继续提升,直至将空置的转运吊装装置吊出储料仓10,完成物料的转运工作;重复上述步骤多次,直至储料仓10满仓;本发明在储料仓10的仓底完成物料的倾倒,降低了物料落差,防止因物料比重不同导致物料的分层;第二步,物料的回收利用:自动电控系统控制第二驱动电机142和第一驱动电机141先后启动,此时气动蝶阀17呈关闭状态,第一密封蛟龙输送机131和第二密封蛟龙输送机132将储料仓10内的物料输送至称重仓11,称重模块16将感应得到的物料重量信号反馈给自动电控系统,达到预设的重量值后,自动电控系统控制搅拌机12的搅拌器、第三驱动电机143和气动蝶阀17先后启动,称重仓11内的物料被第三密封蛟龙输送机133输送至搅拌机12,搅拌后所得物料作为菱镁或硫氧镁板材制品的填充料。期间,可以设定称重仓11达到预设的重量值需要的第一驱动电机141和第二驱动电机142的运作时间,假如第一驱动电机141和第二驱动电机142运作时间超过设定值之后,称重仓11还没达到设定的重量值,自动电控系统延长第一驱动电机141和第二驱动电机142运作时间,如果达到设定的延长时间后,称重仓11内物料重量还未达到设定的重量值,自动电控系统控制第一空气炮151启动一次同时再次延长第一驱动电机141和第二驱动电机142运作时间,如果连续循环启动第一空气炮151三次仍未达到设定的重量值,系统报警故障停机,提示储料仓10需要人为破拱排出故障,重新启动第二驱动电机142和第一驱动电机141,直至称重仓11内物料达到设定的重量值,第一驱动电机141和第二驱动电机142先后停止运转;根据第三密封蛟龙输送机133的出料情况,如果发生异常,自动电控系统控制第二空气炮152启动,如果连续循环启动第二空气炮152三次仍未解决异常情况,系统报警故障停机,提示称重仓11需要人为破拱排出故障。
19.备注:整个生产过程中,启动时,所有电器设备按生产流程的倒序先后启动(相邻两者时间相差5-6s);关闭时,所有电器设备按生产流程的正序先后关闭(相邻两者时间相
差5-6s)。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。