技术特征:
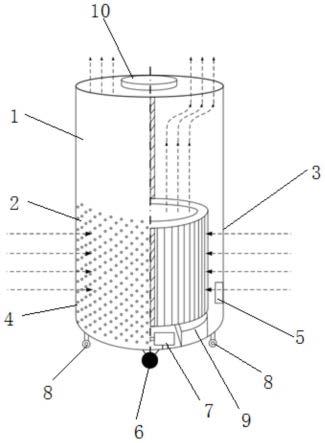
1.一种空气净化器,其特征在于,包括:主体结构(1),所述主体结构(1)包括前进风部(2)和后进风部(3),所述前进风部(2)设有第一空气质量传感器(4),所述后进风部(3)设有第二空气质量传感器(5),所述第一空气质量传感器(4)能够检测所述主体结构(1)的前方污染指数,所述第二空气质量传感器(5)能够检测到所述主体结构(1)的后方污染指数;左驱动轮(6)和右驱动轮,分别设置在所述主体结构(1)底部的左右两侧;驱动结构,用于分别驱动所述左驱动轮(6)和右驱动轮绕各自轮轴转动,所述驱动结构具有使所述左驱动轮(6)的转速和所述右驱动轮的转速相等且向前行走的第一状态,使所述左驱动轮(6)的转速和所述右驱动轮的转速相等且向后行走的第二状态,使所述左驱动轮(6)和所述右驱动轮的其中之一转速为0的第三状态;控制器,分别与所述第一空气质量传感器(4)、所述第二空气质量传感器(5)、所述驱动结构通信连接。2.根据权利要求1所述的空气净化器,其特征在于,所述主体结构(1)的内部设有分隔开的第一风道和第二风道,所述前进风部(2)与所述第一风道连通,所述后进风部(3)与所述第二风道连通。3.根据权利要求1所述的空气净化器,其特征在于,所述第一空气质量传感器(4)包括第一粉尘传感器和第一甲醛传感器,所述第二空气质量传感器(5)包括第二粉尘传感器和第二甲醛传感器。4.根据权利要求1所述的空气净化器,其特征在于,所述主体结构(1)的顶端设有激光雷达(10),所述激光雷达(10)与所述控制器通信连接。5.一种空气净化器的控制方法,其特征在于,所述空气净化器包括主体结构(1)、左驱动轮(6)和右驱动轮、驱动结构,所述主体结构(1)包括前进风部(2)和后进风部(3),所述前进风部(2)设有第一空气质量传感器(4),所述后进风部(3)设有第二空气质量传感器(5),所述第一空气质量传感器(4)能够检测所述主体结构(1)的前方污染指数,所述第二空气质量传感器(5)能够检测到所述主体结构(1)的后方污染指数;所述左驱动轮(6)和所述右驱动轮分别设置在所述主体结构(1)底部的左右两侧;所述驱动结构用于分别驱动所述左驱动轮(6)和右驱动轮绕各自轮轴转动,所述驱动结构具有使所述左驱动轮(6)的转速和所述右驱动轮的转速相等且向前行走的第一状态,使所述左驱动轮(6)的转速和所述右驱动轮的转速相等且向后行走的第二状态,使所述左驱动轮(6)和所述右驱动轮的其中之一转速为0的第三状态,所述控制方法包括:获取所述前方污染指数和所述后方污染指数;将所述前方污染指数和所述后方污染指数进行比较,并根据比较结果确定所述空气净化器的运动方式;其中,所述运动方式包括以下中的至少一种:第一状态、第二状态、第三状态;按照所述运动方式利用所述驱动结构控制所述左驱动轮(6)和所述右驱动轮运动。6.根据权利要求5所述的控制方法,其特征在于,所述将所述前方污染指数和所述后方污染指数进行比较,并根据比较结果确定所述空气净化器的运动方式包括:判断所述前方污染指数和所述后方污染指数是否相等;若所述前方污染指数和所述后方污染指数相等,确定所述空气净化器的运动方式为第
三状态,且寻找是否有前方污染指数不等于后方污染指数的方向;若所述前方污染指数和所述后方污染指数不相等或者有前方污染指数不等于后方污染指数的方向,判断所述前方污染指数是否大于所述后方污染指数;若是,确定所述空气净化器的运动方式为第一状态,以使所述主体结构(1)前行预设距离并重复所述判断所述前方污染指数和所述后方污染指数是否相等的步骤;若否,确定所述空气净化器的运动方式为第二状态,以使所述主体结构(1)后退预设距离并重复所述判断所述前方污染指数和所述后方污染指数是否相等的步骤。7.根据权利要求5或6所述的控制方法,其特征在于,所述第一空气质量传感器(4)包括第一粉尘传感器和第一甲醛传感器,所述第二空气质量传感器(5)包括第二粉尘传感器和第二甲醛传感器,在所述获取所述前方污染指数和所述后方污染指数的步骤之前还包括:获取空气净化模式,所述空气净化模式包括固态颗粒物优先的第一模式或者气态颗粒物优先的第二模式;当所述空气净化模式为第一模式时,所述前方污染指数为所述第一粉尘传感器检测到的空气污染指数,所述后方污染指数为所述第二粉尘传感器检测到的空气污染指数;当所述空气净化模式为第二模式时,所述前方污染指数为所述第一甲醛传感器检测到的空气污染指数,所述后方污染指数为所述第二甲醛传感器检测到的空气污染指数。8.根据权利要求5或6所述的控制方法,其特征在于,所述主体结构(1)的顶端设有激光雷达(10),所述控制方法还包括:获取障碍物与主体结构(1)之间的距离;若所述障碍物与主体结构(1)之间的距离小于预设值时;确定所述空气净化器的运动方式为第一状态、第二状态、第三状态中的一种以使所述主体结构(1)朝向远离所述障碍物的方向移动。9.一种空气净化器的控制装置,其特征在于,所述空气净化器包括主体结构(1)、左驱动轮(6)和右驱动轮、驱动结构,所述主体结构(1)包括前进风部(2)和后进风部(3),所述前进风部(2)设有第一空气质量传感器(4),所述后进风部(3)设有第二空气质量传感器(5),所述第一空气质量传感器(4)能够检测所述主体结构(1)的前方污染指数,所述第二空气质量传感器(5)能够检测到所述主体结构(1)的后方污染指数;所述左驱动轮(6)和所述右驱动轮分别设置在所述主体结构(1)底部的左右两侧;所述驱动结构用于分别驱动所述左驱动轮(6)和右驱动轮绕各自轮轴转动,所述驱动结构具有使所述左驱动轮(6)的转速和所述右驱动轮的转速相等且向前行走的第一状态,使所述左驱动轮(6)的转速和所述右驱动轮的转速相等且向后行走的第二状态,使所述左驱动轮(6)和所述右驱动轮的其中之一转速为0的第三状态,所述控制装置包括:第一获取模块,用于获取所述前方污染指数和所述后方污染指数;第一比较模块,用于将所述前方污染指数和所述后方污染指数进行比较,并根据比较结果确定所述空气净化器的运动方式;其中,所述运动方式包括以下中的至少一种:第一状态、第二状态、第三状态;第一执行模块,按照所述运动方式利用所述驱动结构控制所述左驱动轮(6)和所述右驱动轮运动。10.一种计算机可读存储介质,其上存储有计算机指令,其特征在于,该指令被处理器
执行时实现权利要求5-8中任一项所述的控制方法。
技术总结
本发明涉及空气净化技术领域,具体涉及一种空气净化器及其控制方法,空气净化器包括:主体结构,主体结构包括前进风部和后进风部,前进风部设有第一空气质量传感器,后进风部设有第二空气质量传感器,第一空气质量传感器能够检测主体结构的前方污染指数,第二空气质量传感器能够检测到主体结构的后方污染指数;左驱动轮和右驱动轮,分别设置在主体结构底部的左右两侧;驱动结构,用于分别驱动左驱动轮和右驱动轮绕各自轮轴转动;控制器,分别与第一空气质量传感器、第二空气质量传感器、驱动结构通信连接。构通信连接。构通信连接。
技术研发人员:黄浩哲 陈德波 曾祥锋 张子月 林陆展
受保护的技术使用者:珠海格力电器股份有限公司
技术研发日:2022.05.05
技术公布日:2022/7/15
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。