1.本发明涉及清洁机器人技术领域,特别是涉及一种清洁件的加工方法。
背景技术:
2.目前,清洁机器人的履带式拖布一般包括环状的内圈,以及绕设于内圈外侧的外层,外层一般采用整块展开的抹布贴合于内圈形成。内圈一般为柔性材料,外层为具有起始端和末端的抹布,现有的履带式拖布制作时,在内圈外表面粘贴一块布条,外层环绕内圈并将起始端和末端缝合在布条上,因为布条具有厚度,履带式拖布的整体外形在布条处有相对突出的位置,这会造成履带式拖布与地面的接触不平滑,降低清洁效果。
技术实现要素:
3.本发明的目的在于提供一种清洁件的加工方法,以解决履带式拖布的整体外形在布条处有相对突出的位置,进而造成履带式拖布与地面的接触不平滑而降低清洁效果的问题。
4.为了实现上述目的,本发明提供了一种清洁件的加工方法,包括以下步骤:
5.提供清洁圈和内圈,所述清洁圈包括底胶层和设于所述底胶层一侧的绒布层,所述绒布层位于所述底胶层的内侧;
6.在所述底胶层的另一侧及所述内圈的内侧中的至少一者涂覆粘接剂;
7.将所述内圈套设于所述底胶层外;以及
8.烘烤,以使得所述粘接剂具有粘性,将所述内圈固定于所述底胶层上。
9.进一步的,在所述烘烤的步骤之后,还包括:
10.翻转所述清洁圈和所述内圈,以使得所述内圈位于所述底胶层的内侧,所述绒布层位于所述底胶层的外侧。
11.进一步的,在所述提供清洁圈和内圈的步骤之前,还包括:
12.提供清洁布,所述清洁布包括所述底胶层和设于所述底胶层上的所述绒布层;所述清洁布包括相对的第一端和第二端,将所述第一端和所述第二端缝合,以制成所述清洁圈。
13.进一步的,在所述将所述第一端和所述第二端缝合的步骤之后,还包括:
14.翻转缝合后的所述清洁布,以使绒布层位于所述底胶层的内侧。
15.进一步的,在将所述第一端和所述第二端缝合的步骤之前,还包括:
16.将所述第一端上的绒布刮除,以使所述第二端搭接在所述第一端刮除了绒布的区域上。
17.进一步的,所述将所述第一端和所述第二端缝合的步骤包括:
18.通过缝线将所述第一端与所述第二端缝合,缝合时拨开所述第二端上的绒布,让所述缝线在所述绒布间隙之间走线,以避免所述缝线压到所述绒布。
19.进一步的,在所述将所述第一端和所述第二端缝合的步骤之前,还包括:
20.向所述清洁布的底胶层喷洒硫化剂进行硫化。
21.进一步的,在所述烘烤的步骤之前,还包括:
22.将第一治具伸入所述清洁圈内,以使得所述清洁圈被撑开。
23.进一步的,所述第一治具为圆柱形。
24.进一步的,在所述将第一治具伸入所述清洁圈内,以使得所述清洁圈被撑开的步骤之后,还包括:
25.将第二治具套设于所述内圈外。
26.进一步的,所述第二治具为圆筒形。
27.上述技术方案所提供的一种清洁件的加工方法,与现有技术相比,其有益效果在于:通过上述清洁件的加工方法制得的清洁件,应用于清洁机器人时,因清洁圈自身是环形,内圈与清洁圈的底胶层粘接,而不需要在内圈的外表面再粘贴布条,因此清洁件整体均匀没有相对突出的位置,这使得清洁件与地面的接触更平滑,保证了清洁效果。
附图说明
28.图1是本发明实施例的清洁机器人的结构示意图;
29.图2是图1所示的清洁机器人隐藏了清洁件后的结构示意图;
30.图3是本发明实施例的拖地组件的结构示意图;
31.图4是本发明实施例的第一支架的结构示意图;
32.图5是本发明实施例的第二支架的结构示意图;
33.图6是现有技术的清洁件的结构示意图;
34.图7是本发明一实施例的清洁件的加工方法的流程图;
35.图8是采用图7所示清洁件的加工方法制得的清洁件的结构示意图;
36.图9是本发明另一实施例的清洁件的加工方法的流程图;
37.图10是本发明实施例的清洁布的结构示意图;
38.图11是图9所示的清洁件的加工方法的一实施例中步骤s100的流程图;
39.图12是图9所示的清洁件的加工方法的一实施例中步骤s500的流程图。
40.其中,10-清洁机器人,11-底盘,12-驱动组件,13-拖地组件,131-支架组件,1311-第一支架,1312-第二支架,1313-转轴,1314-凸块,1315-凹槽;
41.132a-清洁件,1321a-内圈,1322-抹布,1322a-起始端,1322b-末端;
42.132b-清洁件,1321b-内圈,1323-清洁圈;
43.2-清洁布,21-第一端,22-第二端。
具体实施方式
44.下面结合附图和实施例,对本发明的具体实施方式作进一步详细描述。以下实施例用于说明本发明,但不用来限制本发明的范围。
45.在本发明的描述中,应当理解的是,本发明中采用术语“中心”、“纵向”、“横向”、“上”、“下”、“前”、“后”、“左”、“右”、“竖直”、“水平”、“顶”、“底”“内”、“外”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本发明和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不
能理解为对本发明的限制。此外,术语“第一”、“第二”仅用于描述目的,而不能理解为指示或暗示相对重要性。
46.在本发明的描述中,需要说明的是,除非另有明确的规定和限定,术语“安装”、“连接”应做广义理解,例如,可以是固定连接,也可以是可拆卸连接,或一体地连接;可以是机械连接,也可以是电连接;可以是直接相连,也可以通过中间媒介间接相连,可以是两个元件内部的连通。对于本领域的普通技术人员而言,可以根据具体情况理解上述术语在本发明中的具体含义。
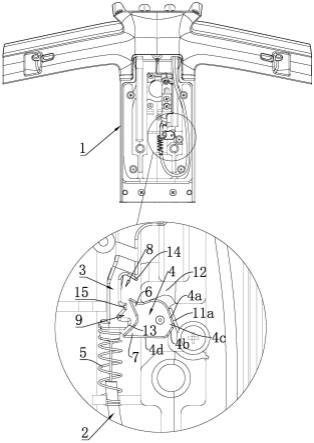
47.如图1所示,本发明实施例提供了一种清洁机器人10,包括底盘11、驱动组件12和拖地组件13,拖地组件13和驱动组件12分别安装于底盘11上。拖地组件13为履带式,拖地组件13的至少部分凸出于底盘11以用于和地面接触;清洁机器人10可在地面移动,并利用拖地组件13实现拖地功能,以清洁地面。
48.在本实施例中,如图2和图3所示,拖地组件13包括支架组件131和清洁件132a,清洁件132a套设于支架组件131上,驱动组件12与支架组件131相联动,以驱使清洁件132a绕支架组件131运动,并在清洁地面的过程中实现拖地功能。驱动组件12可以为电机或者电机与减速箱的组合。
49.如图2至图5所示,在本实施例中,支架组件131包括第一支架1311、第二支架1312和转轴1313,第一支架1311与第二支架1312活动连接,以使得第一支架1311能够相对第二支架1312移动并在撑开状态和收拢状态之间切换。转轴1313设于第一支架1311的远离第二支架1312的一端并与驱动组件12相联动。在撑开状态时,支架组件131的宽度大于收拢状态时的宽度。清洁件132a绕设于支架组件131且在撑开状态时被支架组件131的相对的两端撑开,从而清洁件132a可利用与转轴1313之间的摩擦力被驱动组件12带动而绕支架组件131运动。在收拢状态时,清洁件132a松弛并可从支架组件131脱出,从而便于用户拆装清洁件132a。
50.在一些实施例中,如图4和图5所示,第一支架1311与第二支架1312滑动配合。例如,第一支架1311和第二支架1312中的一者设有凸块1314,另一者开设有凹槽1315,凸块1314滑动配合于凹槽1315。这种结构的凸块1314在平行于转轴1313的轴线方向上可以具有相对较大的宽度,以提升凸块1314与凹槽1315的槽壁的接触面积,进而提升第一支架1311相对第二支架1312的滑动稳定性。
51.图6示出了现有技术的清洁机器人通常采用的清洁件132a的结构示意图,该清洁件132a大致呈环状且包括内圈1321a和绕设于内圈1321a外侧的抹布1322,内圈1321a呈闭合的环状结构且为柔性体,内圈1321a具有相对较好的弯曲特性且可绕设至支架组件131并与支架组件131的相对的两端相抵持。内圈1321a可以为硅胶或橡胶等弹性体,以在绕设至支架组件131后保持一定的弹性变形,使得内圈1321a保持张紧状态,从而防止内圈1321a在支架组件131打滑。
52.请继续参阅图6,现有清洁件132a的抹布1322环绕设置在内圈1321a的外侧,抹布1322包括相对设置的起始端1322a和末端1322b,在抹布1322展平时可呈矩形;在该清洁件132a的加工过程中,通常在内圈1321a的外表面粘贴一块布条,抹布1322环绕内圈1321a设置并将起始端1322a和末端1322b缝合在该布条上。
53.清洁机器人10采用如图6所示的清洁件132a进行清洁地面时,因为布条具有厚度,
清洁件132a的整体外形在布条处有相对突出的位置,这会造成清洁件132a与地面的接触不平滑,降低清洁效果。为了解决清洁件132a整体外形在布条处有相对突出的位置,进而造成清洁件132a与地面的接触不平滑而降低清洁效果的问题,如图7所示,本发明实施例提供了一种清洁件的加工方法,包括以下步骤:
54.s200:提供清洁圈1323和内圈1321b,清洁圈1323包括底胶层和设于底胶层一侧的绒布层,绒布层位于底胶层的内侧。
55.其中,清洁圈1323与内圈1321b均为闭合的环形结构,清洁圈1323可为一体成型的,也可为通过拼接、缝合等手段制成的环形结构;底胶层与绒布层连接,绒布层用于在清洁时直接与地面接触,底胶层背离绒布层的一侧用于与内圈1321b连接。
56.内圈1321b呈闭合的环状结构且为柔性体和弹性体中的至少一种。换言之,内圈1321b可以为柔性体,也可以为弹性体,还可以既是弹性体又是柔性体。例如,内圈1321b的材质可以为硅胶或者橡胶等,这类材料具有相对较好的弹性以及柔性,以在绕设至支架组件131后保持一定的弹性变形,使得内圈1321b保持张紧状态。
57.需要说明的是,绒布层位于底胶层的内侧意为在该步骤时,绒布层处于底胶层的内侧的状态,也就是说,在该步骤之前或之后,绒布层还可以处于在底胶层的外侧的状态;例如,在进行该步骤之前或者说通过任何途径获得的清洁圈1323是绒布层位于底胶层的外侧,在进行加工清洁圈1323的该步骤前,可将清洁圈1323翻转,使绒布层处于底胶层的内侧的状态。
58.s300:在底胶层的另一侧及内圈1321b的内侧中的至少一者涂覆粘接剂。
59.具体的,是在底胶层背离绒布层的一侧涂覆粘接剂,或者在内圈1321b上将要与底胶层粘接的一侧涂覆粘接剂;其中,粘接剂可为ab组分液体硅胶,这种液体胶经过加热后可以具有粘性,使清洁圈1323和内圈1321b形成可靠的固定连接,且加热具有粘性的ab组份液体硅胶还能够保持一定的柔性,以随内圈1321b和清洁圈1323产生弯曲,防止在清洁件132b相对支架组件131运动的过程中出现松脱。当然,在其他实施方式中,可以采用其他类型的液体胶,液体胶加热后具有相似的粘结力和柔性即可。
60.涂覆粘接剂时应尽量保证均匀,在底胶层和内圈1321b中的一者上涂覆即可,当然也可以在两者上均涂覆,涂覆时可人工手持清洁圈1323或内圈1321b,也可通过适配的治具支撑清洁圈1323或内圈1321b。
61.s400:将内圈1321b套设于底胶层外。
62.具体的,在底胶层和内圈1321b中的至少一者上涂覆粘接剂后,将内圈1321b套设于底胶层外侧,以使得内圈1321b的内侧面与底胶层的外侧面相接触,此时绒布层位于底胶层的内侧,底胶层背离绒布层的一侧表面相对光滑,能够与内圈1321b良好的粘接。
63.其中,内圈1321b在没有受力的自然状态下时的外径大小一般小于底胶层的外径大小,因此在将内圈1321b套设于底胶层外时,可将清洁圈1323在径向方向发生变形后插入内圈1321b的内部,或者也可以通过一定的治具撑开内圈1321b,使内圈1321b在径向方向变形,以让内圈1321b的内径稍大于底胶层的外径大小,便于内圈1321b套到底胶层外侧。
64.另外,在内圈1321b套在底胶层外后,因为清洁圈1323的硬度通常大于内圈1321b的硬度,即清洁圈1323更不容易发生形变,故清洁圈1323对内圈1321b能够起到支撑作用,并将内圈1321b撑开产生一定的拉伸变形,此时内圈1321b对底胶层也具有向内的作用力,
这样使内圈1321b处于张紧状态有利于内圈1321b与底胶层的连接,挤压内圈1321b与底胶层之间的粘接剂,使得粘接剂厚度更均匀,并且还能够避免底胶层与内圈1321b层出现气泡的情况,提高粘接性能。
65.此外,本实施例将内圈1321b套设于底胶层外连接的方式,相比于现有在内圈1321a的外表面粘贴一块布条,抹布1322环绕内圈1321a设置并将起始端1322a和末端1322b缝合在该布条上的方式来说,操作更加简便,生产效率更高,并且因在粘贴时内圈1321b对清洁圈1323具有向内的张紧力作用,具有更好连接性能,更容易消除气泡的产生。
66.s500:烘烤,以使得粘接剂具有粘性,将内圈1321b固定于底胶层上。
67.经过步骤s400后,可将内圈1321b和清洁圈1323放置于烤箱内进行加热烘烤,以使得粘接剂具有粘性,使得内圈1321b与底胶层背离绒布层的一侧形成可靠的连接固定。
68.需要说明的是,在清洁件132b实际应用时,内圈1321b位于清洁圈1323的内侧,内圈1321b与支架组件131连接,因此在烘烤完成后将清洁件132b组装至清洁机器人10前需要将清洁件132b翻转过来,使内圈1321b处于清洁圈1323内侧。图8示出了经过上述清洁件的加工方法制得的清洁件132b,其中内圈1321b已被翻转至清洁圈1323的内侧,在将该清洁件132b应用于清洁机器人10中清洁地面时,清洁件132b整体呈均匀厚度,并能够与地面平滑地接触因此,通过上述清洁件的加工方法制得的清洁件132b,应用于清洁机器人10时,因清洁圈1323自身是环形,内圈1321b与清洁圈1323的底胶层粘接,而不需要在内圈1321b的外表面再粘贴布条,因此清洁件132b整体均匀没有相对突出的位置,这使得清洁件132b与地面的接触更平滑,保证了清洁效果。
69.如图9所示,本发明另一实施例还提供了另一种清洁件的加工方法,本实施例与上述实施例的清洁件的加工方法的区别仅在于:
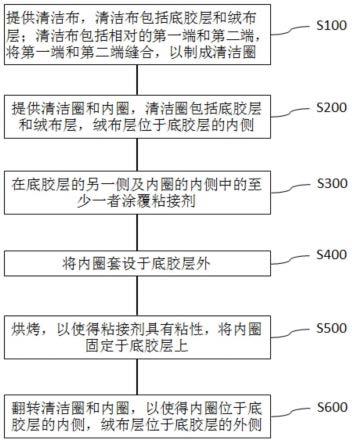
70.在步骤s200之前还包括步骤s100:提供清洁布2,清洁布2包括底胶层和设于底胶层上的绒布层;清洁布2包括相对的第一端21和第二端22,将第一端21和第二端22缝合,以制成清洁圈1323;
71.在步骤s500之后还包括步骤s600:翻转清洁圈1323和内圈1321b,以使得内圈1321b位于底胶层的内侧,绒布层位于底胶层的外侧。
72.具体的,如图10所示,清洁布2可为包括底胶层和绒布层的底胶绒布(底胶层和绒布层图中未示出),可选的,清洁布2展开时的形状为矩形,并可将清洁布2长对边的两端作为第一端21和第二端22,以清洁布2短对边为圆周,使清洁布2围成一个圆筒状后,将第一端21和第二端22进行缝合制成清洁圈1323。
73.在本实施例中,清洁布2在围成圆筒状时,可使绒布层位于底胶层的内侧,对清洁布2进行缝合后绒布层便位于底胶层的内侧;或者在清洁布2围成圆筒状时可使绒布层位于底胶层的外侧,将清洁布2的第一端21和第二端22缝合后,还需要翻转缝合后的清洁布2,以使绒布层位于底胶层的内侧。在对清洁圈1323进行步骤s500的烘烤后,再将清洁圈1323翻转,使内圈1321b位于底胶层的内侧,方便将清洁件132b支架组件131上。
74.本实施例的其他内容与上述实施例的清洁件的加工方法相同,这里不在赘述。
75.如图11所示,在一些实施例中,上述步骤s100包括以下子步骤:
76.s101:提供清洁布2,清洁布2包括底胶层和设于底胶层上的绒布层;清洁布2包括相对的第一端21和第二端22。
77.具体的,清洁布2可为矩形结构,以清洁布2的长对边作为上述相对的第一端21和第二端22;清洁布2可为底胶绒布,可通过激光裁剪的方式将清洁布2裁切为需要的尺寸。
78.s102:向清洁布2的底胶层喷洒硫化剂进行硫化。
79.对底胶层进行硫化,来提高底胶层的性能,使底胶层强度更高、弹性更好,具有耐磨性和抗老化性,以适应清洁机器人10工作时的应用,提高清洁件132b的使用寿命。
80.s103:将第一端21上的绒布刮除,以使第二端22搭接在第一端21刮除了绒布的区域上。
81.刮除第一端21上的绒布可使第二端22与第一端21的接缝处贴合的更加紧密,这样在将第一端21与第二端22连接后,能够防止脏污、灰尘从第一端21和第二端22之间的接缝处进入,影响清洁效果。可选的,刮除第一端21上的绒布使可采用去皮机进行。
82.在刮除第一端21上的绒布后,以清洁布2的短对边为圆周将清洁布2围成圆筒状,并将第二端22底胶层背离绒布层的一侧贴合在第一端21刮除绒布的区域上,接缝处毛绒尽量接近,不留可见缝隙;此时,绒布层位于底胶层的外侧。
83.s104:通过缝线将第一端21与第二端22缝合,缝合时拨开第二端22上的绒布,让缝线在绒布间隙之间走线,以避免缝线压到绒布。
84.具体的,可采用长悬臂缝纫机对第一端21与第二端22进行缝合,避免缝线压到绒布而影响连接以及清洁效果;应当理解的是,连接在底胶层上的绒布是具有一定长度的,缝合时,让缝线在绒布间隙之间走线,缝线时尽量不要压到绒布,也即让缝线直接压倒底胶层的表面上而避免压到绒布,防止缝线压到绒布后会出现局部凸出的情况,影响清洁性能,同时,让缝线在绒布间隙之间走线,让缝线隐匿在绒布之间,尽量避免第一端21与第二端22的接缝处出现间隙。
85.s105:翻转缝合后的清洁布2,以使绒布层位于底胶层的内侧。
86.具体的,在本实施例中,清洁布2围成圆筒状时,清洁布2的绒布层是位于底胶层的外侧,这样在将第一端21与第二端22缝合时方便拨开第二端22上的绒布,但是在将内圈1321b套在清洁圈1323时,清洁圈1323的绒布层需位于底胶层的内侧,因此该步骤需要将缝合后的清洁布2翻转,以使绒布层位于底胶层的内侧。
87.在其他一些实施例中,清洁布2在围成圆筒状时,还可使清洁布2的绒布层位于底胶层的内侧,将清洁布2的第一端21和第二端22缝合后,清洁圈1323的绒布层即位于底胶层的内侧,而不再需要进行步骤s105的翻转动作。
88.如图12所示,在一些实施例中,上述步骤s500包括以下子步骤:
89.s501:将第一治具伸入清洁圈1323内,以使得清洁圈1323被撑开。
90.具体的,在将内圈1321b套在清洁圈1323上后,清洁圈1323难免会出现变形的情况,因此需要将清洁圈1323撑开为圆筒状,以便内圈1321b与清洁圈1323良好的粘接。可选的,第一治具为圆柱形,将第一治具塞入清洁圈1323内部,第一治具的直径小于清洁圈1323内径约1-2mm,在塞入过程中注意挤压内圈1321b与清洁圈1323之间的气泡。
91.s502:将第二治具套设于内圈1321b外。
92.具体的,上述步骤s501是通过从内部撑开进而提高清洁圈1323与内圈1321b之间的连接质量,还可再通过从内圈1321b的外部挤压以提高清洁圈1323与内圈1321b之间的连接质量,第二治具套设于内圈1321b外后紧贴内圈1321b的外侧。可选的,第二治具为圆筒
形,在将经过步骤s501的清洁圈1323放入第二治具内加热时,还可避免内圈1321b收缩。
93.s503:烘烤,以使得所述粘接剂具有粘性,将所述内圈1321b固定于所述底胶层上。
94.可将内圈1321b和清洁圈1323放置于烤箱内进行加热烘烤,以使得粘接剂具有粘性,使得内圈1321b与底胶层背离绒布层的一侧形成可靠的连接固定。第一治具和第二治具能够保证在粘接剂逐渐固化时,内圈1321b与清洁圈1323可靠的连接。
95.综上,本发明实施例提供一种清洁件的加工方法,通过该方法制得的清洁件132b应用于清洁机器人10时,因清洁圈1323自身是环形,内圈1321b与清洁圈1323的底胶层粘接,而不需要在内圈1321b的外表面再粘贴布条,因此清洁件132b整体均匀没有相对突出的位置,这使得清洁件132b与地面的接触更平滑,保证了清洁效果。
96.以上所述仅是本发明的优选实施方式,应当指出,对于本技术领域的普通技术人员来说,在不脱离本发明技术原理的前提下,还可以做出若干改进和替换,这些改进和替换也应视为本发明的保护范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。