1.本发明涉及无电解电容永磁同步电机驱动系统防过压控制方法,属于电机控制技术领域。
背景技术:
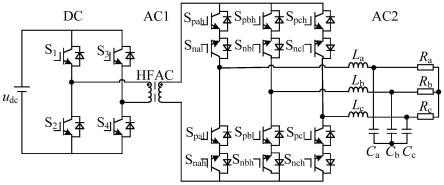
2.为了提高功率密度和延长系统寿命,进一步降低驱动系统的体积和成本,永磁电机驱动系统领域目前正在尝试采用薄膜电容替代变频器直流侧电解电容,特别是在风机等压缩机类的应用场合。然而,相较于传统的电解电容电机驱动器,小容值的薄膜电容会导致直流侧储存能量的能力变弱,使母线电压产生明显的波动。特别是采用不可控整流电路的变频器,即使是较少的机侧能量涌入直流侧,也会导致母线电压的泵升。因此,系统再生制动过程中直流侧易过电压的问题,在无电解电容驱动系统需要重点考虑。
3.目前,对无电解电容驱动系统的防过压控制策略已有较多研究。其中硬件方案,比如在直流侧并联辅助制动电阻的方式,能够实现较好的防过压控制效果;然而硬件方案会给驱动系统增加额外的体积和成本。控制q轴电流降低电机降速速率和控制d轴电流增加电机损耗,是软件方案在再生制动过程中的主要控制手段。然而,对于传统的q轴电流限幅的防过压控制方法,由于电流环带宽的限制,q轴电流存在固有的控制误差,会导致较大的母线电压控制误差。
4.因此,需要提供一种控制方法来实时判断q轴电流,以减小控制器带宽导致的母线电压控制误差,有效实现防过压的目的和提高驱动系统动态性能。
技术实现要素:
5.针对现有电机驱动系统直流侧电解电容替换成小容值薄膜电容后,随着电容容值的降低,直流侧储存能量的能力变弱,易发生过电压的问题,本发明提供一种无电解电容永磁同步电机驱动系统防过压控制方法。
6.本发明的一种无电解电容永磁同步电机驱动系统防过压控制方法,包括,
7.采用电压控制器基于检测获得的母线电压u
dc
和母线电压限幅值u
dc-max
计算获得限幅电流并在实际q轴电流iq小于或者等于0时,将限幅电流作为电压控制器的一号q轴电流给定输出;在实际q轴电流iq大于0时,将0作为电压控制器的一号q轴电流给定输出;
8.在矢量控制环节基于转子实际转速和转子给定转速计算获得二号q轴电流给定
9.由一号q轴电流给定和二号q轴电流给定获得给定q轴电流并参与到矢量控制环节中,实现电机驱动系统的防过压控制。
10.根据本发明的无电解电容永磁同步电机驱动系统防过压控制方法,获得限幅电流的方法包括:
11.将检测获得的母线电压u
dc
采用一号减法单元减去母线电压限幅值u
dc-max
得到母线电压控制差值δu
dc
,将母线电压控制差值δu
dc
通过电压调节器的电压调节电流限幅单元进行处理,获得限幅电流
12.根据本发明的无电解电容永磁同步电机驱动系统防过压控制方法,母线电压控制差值δu
dc
通过电压调节器的电流限幅单元进行处理,获得限幅电流的方法包括:
[0013][0014]
式中k
p
为电压调节器比例系数,i
qu-max
为电压调节器电流上限幅值。
[0015]
根据本发明的无电解电容永磁同步电机驱动系统防过压控制方法,获得电压控制器的一号q轴电流给定的过程包括:
[0016]
将限幅电流和0作为开关切换单元的输入,开关切换单元在实际q轴电流iq小于或者等于0时,输出限幅电流作为一号q轴电流给定开关切换单元在实际q轴电流iq大于0时,输出0作为一号q轴电流给定
[0017]
根据本发明的无电解电容永磁同步电机驱动系统防过压控制方法,获得二号q轴电流给定的方法包括:
[0018]
由速度/位置观测器(120)观测得到转子实际转速将转子给定转速通过二号减法单元减去转子实际转速得到转速控制差值δωe,将转速控制差值δωe经过转速调节器获得转速调节器输出电流将转速调节器输出电流经转速调节电流限幅单元限幅后,得到二号q轴电流给定
[0019]
根据本发明的无电解电容永磁同步电机驱动系统防过压控制方法,一号q轴电流给定和二号q轴电流给定经加法单元相加,得到给定q轴电流
[0020]
本发明的有益效果:本发明方法基于对交轴电流的调节实现驱动器的防过压控制,它通过实时判断q轴电流,在实际q轴电流大于0时,及时关断电压控制器的输出,由此可以减小控制器带宽导致的母线电压控制误差,有效实现防过压的目的和提高驱动系统动态性能。
附图说明
[0021]
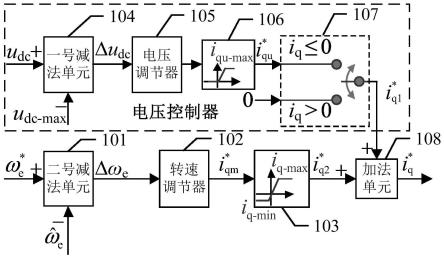
图1是本发明所述无电解电容永磁同步电机驱动系统防过压控制方法的原理示意图;包括电压控制器与部分矢量控制;图中i
q-max
为转速调节电流上限幅值,i
q-min
为转速调节电流下限幅值;
[0022]
图2是采用本发明方法进行交轴电流调节的无电解电容永磁同步电机驱动系统控制框图;包括电压控制器与矢量控制环节;图中为d轴电流指令,δid为d轴电流差,δiq为q轴电流差,为d轴电压指令,为q轴电压指令,为α轴电压指令,为β轴电压指令,ia为实际a相电流,ib为实际b相电流,ic为实际c相电流,i
α
为实际α轴电流,i
β
为实际β轴电流,id为实际d轴电流,iq为实际q轴电流,为转子观测位置;
[0023]
图3是未采用防过压控制策略时,带载降速下的母线电压和电机转速仿真波形图;
[0024]
图4是采用本发明方法的防过压控制策略时,带载降速下的母线电压和电机转速仿真波形图;图3和图4中,母线电压限幅值u
dc-max
设置为618v,电机给定转速为1500r/min,0.2s时给定转速从1500r/min逐渐降低到0r/min,负载转矩为5n
·
m;
[0025]
图5是未采用防过压控制策略时,升速过程突卸负载下的母线电压和电机转速仿真波形图;
[0026]
图6是采用本发明方法的防过压控制策略时,升速过程突卸负载下的母线电压和电机转速仿真波形图;图5和图6中母线电压限幅值u
dc-max
设置为618v,电机给定转速为1500r/min,负载转矩为30n
·
m,0.15s电机升速时负载转矩突变为0n
·
m。
具体实施方式
[0027]
下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动的前提下所获得的所有其它实施例,都属于本发明保护的范围。
[0028]
需要说明的是,在不冲突的情况下,本发明中的实施例及实施例中的特征可以相互组合。
[0029]
下面结合附图和具体实施例对本发明作进一步说明,但不作为本发明的限定。
[0030]
具体实施方式一、结合图1和图2所示,本发明提供了一种无电解电容永磁同步电机驱动系统防过压控制方法,包括,
[0031]
采用电压控制器基于检测获得的母线电压u
dc
和母线电压限幅值u
dc-max
计算获得限幅电流并在实际q轴电流iq小于或者等于0时,将限幅电流作为电压控制器的一号q轴电流给定输出;在实际q轴电流iq大于0时,将0作为电压控制器的一号q轴电流给定输出;在实际q轴电流iq大于0时,电机工作于电动模式,无需对母线电压进行控制,因此电压控制器输出为0。
[0032]
在矢量控制环节基于转子实际转速和转子给定转速计算获得二号q轴电流给定
[0033]
由一号q轴电流给定和二号q轴电流给定获得给定q轴电流并参与到矢量控制环节中,实现电机驱动系统的防过压控制。
[0034]
本实施方式基于交轴电流的调节实现防过压控制,可用于防止无电解电容驱动系统直流侧过电压的现象。
[0035]
进一步,结合图1和图2所示,获得限幅电流的方法包括:
[0036]
将检测获得的母线电压u
dc
采用一号减法单元104减去母线电压限幅值u
dc-max
得到母线电压控制差值δu
dc
,将母线电压控制差值δu
dc
通过电压调节器105的电压调节电流限幅单元106进行处理,获得限幅电流
[0037]
再进一步,母线电压控制差值δu
dc
通过电压调节器105的电流限幅单元106进行处
理,获得限幅电流的方法包括:
[0038][0039]
式中k
p
为电压调节器比例系数,i
qu-max
为电压调节器电流上限幅值。
[0040]
再进一步,结合图1和图2所示,获得电压控制器的一号q轴电流给定的过程包括:
[0041]
将限幅电流和0作为开关切换单元107的输入,开关切换单元107在实际q轴电流iq小于或者等于0时,输出限幅电流作为一号q轴电流给定开关切换单元107在实际q轴电流iq大于0时,输出0作为一号q轴电流给定
[0042]
再进一步,结合图1和图2所示,获得二号q轴电流给定的方法包括:
[0043]
由速度/位置观测器120观测得到转子实际转速将转子给定转速通过二号减法单元101减去转子实际转速得到转速控制差值δωe,将转速控制差值δωe经过转速调节器102获得转速调节器输出电流将转速调节器输出电流经转速调节电流限幅单元103限幅后,得到二号q轴电流给定
[0044]
再进一步,结合图1和图2所示,一号q轴电流给定和二号q轴电流给定经加法单元108相加,得到给定q轴电流
[0045]
结合图2所示,本发明方法的防过压控制策略主要由两部分构成,一部分是矢量控制,一部分是电压控制器。
[0046]
矢量控制部分包括二号减法单元101、转速调节器102、转速调节电流限幅单元103、加法单元108、三号减法单元109、四号减法单元111、一号电流调节器110、二号电流调节器112、反park坐标系变换单元113、交流源114、三相不控整流桥115、三相pwm逆变器116、永磁同步电机117、clark变换单元118、park坐标系变换单元119、速度/位置观测器120。
[0047]
转速环为外环,转子给定转速与转子实际转速通过二号减法单元101作差,将转速控制差值δωe经过转速调节器102和转速调节器电流限幅单元103,得到二号q轴电流给定一号q轴电流给定和二号q轴电流给定通过加法单元108得到q轴电流指令
[0048]
内环为电流环,给定q轴电流和实际q轴电流iq通过三号减法单元109作差,q轴电流差δiq经过一号电流调节器110得到q轴电压指令d轴电流指令和实际d轴电流id通过四号减法单元111作差,d轴电流差δid经过二号电流调节器112得到d轴电压指令
[0049]
park坐标系变换单元119和反park坐标系变换单元113,可以实现电机定子两相静止坐标系下的α轴电压、电流指令和β轴电压、电流到两相旋转坐标系下的d轴电压、电流指令和q轴电压、电流指令的变换和逆变化。clark变换单元118,可以实现电机定子三相电流ia、ib和ic到两相静止坐标系下的α轴电流指令和β轴电流指令的
变换。
[0050]
变频器通过三相交流电源114供电,三相不控整流桥115整流,svpwm控制三相逆变器116,最终实现对永磁同步电机117的控制。
[0051]
电压控制器部分包括一号减法单元104、电压调节器105、电压调节电流限幅单元106和开关切换单元107。
[0052]
具体实施例:
[0053]
下面以具体实例验证本发明方法的有效性:
[0054]
在无电解电容永磁同步电机驱动系统平台上验证本发明提出的防过压策略的有效性。实验平台的各项参数设置为:电网电压380v,电网频率50hz,直流母线电容采用薄膜电容,容值为30μf,网侧电感2.5mh,电机d轴电感7.5mh,q轴电感17.5mh,转子极对数为3,额定转速为1500r/min,定子电阻为0.265ω。开关频率和电流、电压采样值更新频率均设为8khz,电压调节器比例系数k
p
为8,电压调节器电流上限幅值i
qu-max
为8a,转速调节电流下限幅值i
q-min
为-2a。
[0055]
结合图3和图4所示可知,采用本发明方法的防过压控制策略后,能够有效实现防过压控制的目的,降速时间为0.53s。
[0056]
结合图5和图6所示可知,采用本发明方法的防过压控制策略后,能够有效实现防过压的目的,降速时间为1.25s。
[0057]
以上对本发明所提供的无电解电容永磁同步电机驱动系统防过压控制方法,进行了详细介绍,本文中应用了具体个例对本发明的原理及实施方式进行了阐述,以上实施例的说明只是用于帮助理解本发明的方法及其核心思想;同时,对于本领域的一般技术人员,依据本发明的思想,在具体实施方式及应用范围上均会有改变之处,综上所述,本说明书内容不应理解为对本发明的限制。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。