1.本发明属于摆轮检测技术领域,具体涉及一种摆轮偏重参数测量系统及方法。
背景技术:
2.摆轮参数中,除了外形尺寸和材质方面的参数外,摆轮的偏重量和偏重角度这两个参数在摆轮生产过程中是十分总要的,摆轮的静平衡过程就是依据测量这两个参数来进行加工工作的。
3.在摆轮检测方面,能够起到对电路相移进行快速自动补偿,且精度足够高满足生产需求的,目前还没有见到。可以见到的比如用可变的电阻或电容组成的阻容移相电路,通过调节电阻或电容的大小来调节补偿相位值,只适合频率固定的场合,且精度和稳定性不高;再有利用压控技术和全通滤波电路,但这种电路组成复杂不易调试,且反应慢,需要时间的累积才能逐渐消除误差,达不到快速跟随输入信号的变化;再有就是利用相对庞大的计算机系统,采样输入信号后,利用特定软件进行运算处理;再有就是利用纯电感和电容组成的无相移lc滤波器,但对于较低频率应用时,组成的电感和电容体积庞大,校准困难,这在小型化的应用上很受限制。
技术实现要素:
4.为了克服上述现有技术存在的不足,本发明提供了一种摆轮偏重参数测量系统及方法。
5.为了实现上述目的,本发明提供如下技术方案:
6.一种摆轮偏重参数测量系统,包括:
7.转速光电传感器,用于获取摆轮圆盘钉平面反射的光信号;
8.偏重测量传感器,用于获得摆轮旋转时的震动信号;
9.微处理器,与所述圆盘钉转速信号电平转换器、过零比较器和模数转换器电连接,用于通过摆轮旋转时的震动信号获得摆轮的偏重信号和偏重过零点信号,通过摆轮圆盘钉平面反射的光信号获得摆轮的圆盘钉信号,获取信号滤波调理电路的相频补偿特征方程,利用相频补偿特征方程计算相位偏移角度,利用圆盘钉信号、偏重过零点信号和相位偏移角度获得摆轮偏重角度,利用摆轮的偏重信号计算获得测量摆轮偏重量。
10.优选的,还包括:
11.圆盘钉转速信号电平转换器,与所述转速光电传感器电连接;所述圆盘钉转速信号电平转换器用于将摆轮圆盘钉平面反射的光信号转换成脉冲信号;
12.仪表放大器,与所述偏重测量传感器电连接;所述仪表放大器用于放大震动信号;
13.信号滤波调理电路,与所述仪表放大器电连接;所述信号滤波调理电路用于对震动信号滤波形成带通信号;所述信号滤波调理电路包括:42hz低通滤波器,与所述仪表放大器电连接;所述42hz低通滤波器用于对震动信号滤波形成低通信号;40hz带通滤波器,与所述42hz低通滤波器电连接;所述40hz带通滤波器用于对低通信号滤波形成带通信号;
14.过零比较器,与所述信号滤波调理电路电连接;所述过零比较器用于将带通信号转换为方波信号;
15.模数转换器,与所述信号滤波调理电路电连接;所述模数转换器用于对带通信号进行采样,形成数字信号;与所述信号滤波调理电路电连接。
16.一种摆轮偏重参数测量方法,包括以下步骤:
17.获取摆轮圆盘钉平面反射的光信号;
18.获取摆轮旋转时的震动信号;
19.通过摆轮旋转时的震动信号获得摆轮的偏重信号和偏重过零点信号;
20.通过摆轮圆盘钉平面反射的光信号获得摆轮的圆盘钉信号;
21.获取信号滤波调理电路的相频补偿特征方程;
22.利用相频补偿特征方程计算相位偏移角度;
23.利用圆盘钉信号、偏重过零点信号和相位偏移角度获得摆轮偏重角度;
24.利用摆轮的偏重信号计算获得测量摆轮偏重量。
25.优选的,所述通过摆轮旋转时的震动信号获得摆轮的偏重信号的步骤包括:
26.采集摆轮旋转时的震动信号;
27.对震动信号进行放大;
28.将放大后的震动信号滤波形成低通信号;
29.将低通信号滤波形成带通信号;
30.对带通信号进行采样,形成数字信号;所述数字信号即为摆轮的偏重信号。
31.优选的,还包括:
32.采集摆轮旋转时的震动信号;
33.对震动信号进行放大;
34.将放大后的震动信号滤波形成低通信号;
35.将低通信号滤波形成带通信号;
36.将带通信号转换为方波信号;
37.对方波信号的信号下沿进行采样得到摆轮的偏重过零点信号。
38.优选的,所述通过摆轮圆盘钉平面反射的光信号获得摆轮的圆盘钉信号的步骤包括:
39.将摆轮圆盘钉平面反射的光信号转换得到脉冲信号;
40.对脉冲信号的信号下沿进行采样得到摆轮的圆盘钉信号。
41.优选的,所述获取信号调理电路的相频补偿特征方程的步骤包括:
42.获取信号滤波调理电路的频率-相位特性曲线;
43.在频率-相位特性曲线上取若干点;
44.对若干点建立散点图;
45.根据散点图生成相频补偿特征方程。
46.优选的,所述相频补偿特征方程表示如下:
47.θ=0.1913f
4-27.987f3 1520.3f
2-36311f 321365
48.其中,f为摆轮的旋转频率,θ为相位偏移角度。
49.优选的,所述获得摆轮偏重角度的步骤包括:
50.利用圆盘钉信号测得摆轮的旋转周期;
51.对偏重过零点信号的下降沿和圆盘钉信号的下降沿之间的时间差得到未补偿角度a1;
52.利用摆轮的旋转周期获得摆轮的旋转频率;
53.将摆轮的旋转频率代入相频补偿特征方程得到相位偏移角度;
54.利用未补偿角度和相位偏移角度计算摆轮的偏重角度,
55.a=a
1-θ
56.其中,a为摆轮的偏重角度,θ为相位偏移角度。
57.优选的,通过下式获得摆轮偏重量,摆轮偏重量=偏重信号最大值-偏重信号最小值。
58.本发明提供的一种摆轮偏重参数测量系统及方法具有以下有益效果:本发明使用的电子元件少,体积小,价格低廉,操作简单,便于小型化应用。本发明对输入信号的包容度大,解决了现有技术中调理电路的输入信号有杂波干扰无法正常工作的问题。本发明通过调节电路的特性进行相位补偿,能够适应适合多种频率,稳定性低高,速度快,可在一个信号周期内做出相位补偿。。
附图说明
59.为了更清楚地说明本发明实施例及其设计方案,下面将对本实施例所需的附图作简单地介绍。下面描述中的附图仅仅是本发明的部分实施例,对于本领域普通技术人员来说,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
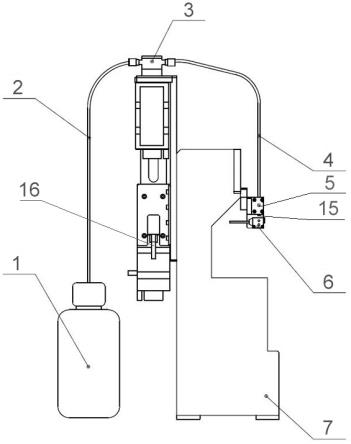
60.图1为本发明实施例1的摆轮偏重参数测量系统的结构图;
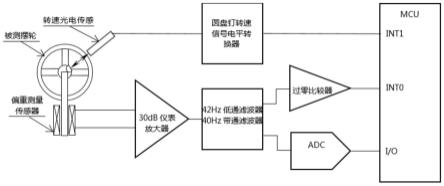
61.图2为本发明实施例1的信号滤波调理电路的电路图;
62.图3为本发明实施例1的信号处理的时序图。
具体实施方式
63.为了使本领域技术人员更好的理解本发明的技术方案并能予以实施,下面结合附图和具体实施例对本发明进行详细说明。以下实施例仅用于更加清楚地说明本发明的技术方案,而不能以此来限制本发明的保护范围。
64.实施例1
65.参阅图1,本发明提供了一种摆轮偏重参数测量系统,包括:转速光电传感器、圆盘钉转速信号电平转换器、偏重测量传感器、仪表放大器、信号滤波调理电路、过零比较器、模数转换器和微处理器。其中,圆盘钉转速信号电平转换器与转速光电传感器电连接。仪表放大器,与偏重测量传感器电连接。信号滤波调理电路,与仪表放大器电连接。过零比较器,与信号滤波调理电路电连接。模数转换器,与信号滤波调理电路电连接。微处理器,与圆盘钉转速信号电平转换器、过零比较器和模数转换器电连接。
66.在本实施例中,转速光电传感器用于接收摆轮圆盘钉平面反射的光信号。圆盘钉转速信号电平转换器用于将摆轮圆盘钉平面反射的光信号转换成脉冲信号。偏重测量传感器用于获得摆轮旋转时的震动信号。摆轮参数测量过程中,传感器传来的信号非常小,基本上是在mv以下,且常常淹没在比有用信号大很多的杂散干扰中(干扰可达几十mv),波形中
有用波完全被幅值大好几倍的干扰信号覆盖,在本实施例中通过仪表放大器放大震动信号。信号滤波调理电路用于对震动信号滤波形成带通信号。过零比较器用于将带通信号转换为方波信号。模数转换器用于对带通信号进行采样,形成数字信号。微处理器用于通过处理脉冲信号、数字信号和方波信号得到摆轮偏重角度和摆轮偏重量。
67.在实际的测试中,对摆梁偏重参数的测量是在摆轮从45hz开始自由降速过程中。参阅图2,信号滤波调理电路包括:42hz低通滤波器和40hz带通滤波器。42hz低通滤波器与仪表放大器电连接,40hz带通滤波器,与42hz低通滤波器电连接。42hz低通滤波器用于对震动信号滤波形成低通信号。40hz带通滤波器用于对低通信号滤波形成带通信号。
68.在本实施例中,一种摆轮偏重参数的测量方法,包括以下步骤:通过摆轮旋转时的震动信号获得摆轮的偏重信号和偏重过零点信号;通过摆轮圆盘钉平面反射的光信号获得摆轮的圆盘钉信号;获取信号滤波调理电路的相频补偿特征方程;利用相频补偿特征方程计算相位偏移角度;利用圆盘钉信号、偏重过零点信号和相位偏移角度获得摆轮偏重角度;利用摆轮的偏重信号计算获得测量摆轮偏重量。
69.在本实施例中,获得摆轮的偏重信号的步骤包括:采集摆轮旋转时的震动信号;对震动信号进行放大;将放大后的震动信号滤波形成低通信号;将低通信号滤波形成带通信号;对带通信号进行采样,形成数字信号;数字信号即为摆轮的偏重信号。
70.在本实施例中,得到摆轮的偏重过零点信号的步骤包括:采集摆轮旋转时的震动信号;对震动信号进行放大;将放大后的震动信号滤波形成低通信号;将低通信号滤波形成带通信号;将带通信号转换为方波信号;对方波信号的信号下沿进行采样得到摆轮的偏重过零点信号。
71.在本实施例中,通过摆轮圆盘钉平面反射的光信号获得摆轮的圆盘钉信号的步骤包括:将摆轮圆盘钉平面反射的光信号转换得到脉冲信号;对脉冲信号的信号下沿进行采样得到摆轮的圆盘钉信号。
72.摆轮从45hz开始自由降速过程中,在经过40hz时进行的,有两个问题需要解决的,一是下降过程中虽然必定经过40hz这一点,因转动周期是时间区间,40hz只是一个时间点,所以测量到的往往会存在零点几hz的偏差;二是信号调理电路造成的相位偏移。
73.在信号调理电路中常常会用到电阻、电容等组成的滤波器电子电路,由于电路中存在电容元件,就会造成处理前后的信号相比会有相位变化,也就是说输入和输出信号不是同相位的了,出现偏移一定角度的现象。例如:在偏重测量传感信号进行调理时,选用了“2阶42hz巴特沃兹低通滤波器 2
×
2阶fo=40hz的带通滤波器”的调理电路结构。使用波特测试仪对该调理电路进行相频特性(相位-频率)进行测试,从测试结果看,在摆轮参数测试点40hz位置(光标1)的输出波形较输入波形偏移了-72.574
°
,即坐标点(x1,y1)=(40.0000,-72.5740),并且随着频率的变化,调理后的信号相位相对于调理之前的信号相位随时都在变化,比如在该滤波器电路的在40.1250hz时(光标2),输出信号较输入信号偏移了-79.8562
°
,频率变化量只有0.125hz,但相位角却相差7.2822
°
之多,并且这一变化趋势是非线性的。若应用在要求的角度测量偏差要小于
±
0.5
°
的摆轮参数测量系统中,其角度造成的偏差是后面系统无法接受的,也就是说信号调理后的相位偏差必须严格控制,否则无法使用,必须采取措施进行补偿。
74.相位偏差偏移的相位角与频率之间的关系,是一条非线性的特征曲线,因此在获
得摆轮偏重角度之前,必须先获得信号调理前后的特征方程,然后根据实时的频率计算出对应的动态补偿角度,然后再计算出实际的偏重角度。在本实施例中,获取信号调理电路的相频补偿特征方程的步骤包括:获取信号滤波调理电路的频率-相位特性曲线;在频率-相位特性曲线上取若干点;对若干点建立散点图;根据散点图生成相频补偿特征方程。
75.其中,相频补偿特征方程表示如下:
76.θ=0.1913f
4-27.987f3 1520.3f
2-36311f 321365
77.其中,f为摆轮的旋转频率,θ为相位偏移角度。
78.在本实施例中,通过电路仿真软件,使用波特仪显示频率-角度特性曲线,并在曲线上取若干频率点对应的相位角度,在excel中建立散点图,并获得该曲线的趋势曲线公式,此公式即为信号调理电路的相频补偿特征方程。
79.在本实施例中,获得摆轮偏重角度的步骤包括:利用圆盘钉信号测得摆轮的旋转周期(两个脉冲下降沿之间的间隔时间);对偏重过零点信号的下降沿和圆盘钉信号的下降沿之间的时间差得到未补偿角度a1;利用摆轮的旋转周期获得摆轮的旋转频率,其中,摆轮的旋转频率为摆轮的旋转周期的倒数;将摆轮的旋转频率代入相频补偿特征方程得到相位偏移角度;由于未补偿角度a1实际上包含了摆轮偏重角度a和因调理电路造成的相位偏移角度θ,利用未补偿角度和相位偏移角度计算摆轮的偏重角度,a=a
1-θ,其中,a为摆轮的偏重角度,a1为未补偿角度,θ为相位偏移角度。
80.图3工作过程中信号处理的时序图中可以看出,摆轮转速的测量区间,也是偏重量测量区间。偏重量的测量实际上就是此区间内,偏重信号的峰峰值,利用高速adc实现快速采样偏重信号的电压值,并实时做出比较,获取偏重信号电压的最大值max和最小值min,其差值(max-min),即代表了摆轮偏重量的数值。在本实施例中,通过下式获得摆轮偏重量,摆轮偏重量=偏重信号最大值-偏重信号最小值,即摆轮偏重量=max-min。
81.以上实施例仅为本发明较佳的具体实施方式,本发明的保护范围不限于此,任何熟悉本领域的技术人员在本发明披露的技术范围内,可显而易见地得到的技术方案的简单变化或等效替换,均属于本发明的保护范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。