1.本发明涉及光束对准和光轴稳定技术领域,具体而言,涉及一种折反式光瞳光轴传感器。
背景技术:
2.运动平台(如卡车、飞机、舰船等)搭载激光系统的激光通信、激光测距、激光除冰、激光雷达、激光清除空间碎片、
……
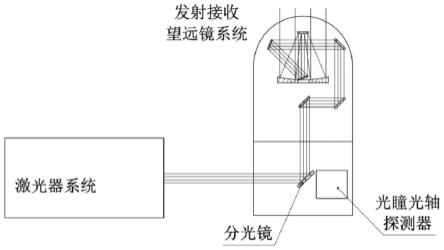
,等各种激光传输和发射接收系统中,激光器和发射接收望远镜安装在平台不同部位,如图1所示,需要在复杂环境中确保激光器光束对准望远镜光瞳中心(光瞳位置通常设置在图1所示光路分光镜附近),并使激光传输方向与望远镜光轴一致。光瞳光轴传感器是运动平台宽频振动复杂环境搭载激光系统中激光器输出光束相对于望远镜光瞳位置和光轴方向的误差测量设备,它探测望远镜入口处分光镜透射的采样信号光束,获得激光束在望远镜光瞳位置处的光束对准误差和光轴方向误差。然而在实际应用中,设备的体积都较大,且重量较重,导致使用不便等诸多问题。
技术实现要素:
3.本发明旨在至少解决现有技术中存在的技术问题之一。
4.为此,本发明提供了一种折反式光瞳光轴传感器。
5.本发明提供了一种折反式光瞳光轴传感器,包括:
6.前端光学系统,设置于被探测的光瞳面的一侧,以对光束进行反射、折叠以及聚焦;
7.光路整合系统,设置于所述前端光学系统的一侧,且接收从光路反射单元反射而出的光束,所述光束由光路整合单元的一端进入并分为两路射出;
8.光瞳探测器,设置于其中一路光束的出口位置,以用于探测光瞳面处的光束截面光斑强度分布,获得光瞳位置处的光束对准误差;
9.光轴探测器,设置于其中另一路光束的出口位置,以用于探测激光束远场光强分布,获得光轴方向误差。
10.根据本发明上述技术方案的折反式光瞳光轴传感器,还可以具有以下附加技术特征:
11.在上述技术方案中,所述前端光学系统包括半透半反镜,球面反射镜,平面反射镜;
12.其中,光束由所述半透半反镜进入,并折射至所述球面反射镜,经反射后至所述平面反射镜,最后反射至光路整合系统。
13.在上述技术方案中,所述光路整合系统包括依次排列的负光焦度透镜组,分光棱镜,衰减和滤光片组以及光瞳透镜组。
14.在上述技术方案中,所述负光焦度透镜组为两片或者多片透镜组成的消像差负光焦度透镜组,并与前端光学系统组合,以消除光学系统视场中的球差、色差、彗差、像散,并
在较小的光路总长度内获得较长的等效焦距,以保证光瞳光轴传感器的探测精度。
15.在上述技术方案中,所述分光棱镜为部分反射和部分透射分光棱镜,把信号光束分为两路,分别进入光瞳探测支路和光轴探测支路。
16.在上述技术方案中,所述衰减和滤光片组由衰减片和滤光片组成,衰减片用于调整进入探测器的光强,滤光片用于滤出背景光以提高探测信噪比。
17.在上述技术方案中,所述光瞳透镜组由两片或者多片透镜组成的透镜组,使光瞳面成像到光瞳探测器感光面,实现光瞳面处光束位置对准误差探测。
18.在上述技术方案中,所述光瞳探测器是高帧频ccd相机或cmos相机,用于探测光瞳面处的光束截面光斑强度分布,获得光瞳位置处的光束对准误差。
19.在上述技术方案中,所述光轴探测器为高帧频相机或位置敏感探测器,用于探测激光束远场光强分布,获得光轴方向误差。
20.本发明提出的折反式光瞳光轴传感器,与现有技术相比,具有以下有益效果:
21.采用半透半反镜,球面反射镜,平面反射镜组成反射元件折叠光路前端光学系统,结合负光焦度透镜组得到较长的等效焦距,获得高精度测量能力,并缩短系统总长度;通过分光棱镜和后端元件,在一套设备内同时实现光瞳位置误差和光轴方向误差的测量;根据工程应用中的安装空间约束,灵活选择光路布局方式,控制系统在各方向上的尺寸,满足应用环境有限安装空间内的尺寸约束。
22.在一套设备内同时实现了运动平台宽频振动复杂环境搭载激光系统中激光器输出光束相对于望远镜的光瞳位置和光轴方向的测量,尺寸小重量轻,结构紧凑,精度高。
23.本发明的附加方面和优点将在下面的描述部分中变得明显,或通过本发明的实践了解到。
附图说明
24.本发明的上述和/或附加的方面和优点从结合下面附图对实施例的描述中将变得明显和容易理解,其中:
25.图1是激光传输和发射接收系统光路示意图;
26.图2是本发明的折反式光瞳光轴传感器的光路布局图之一(半透半反镜,球面反射镜和平面反射镜布置形式的一种);
27.图3是本发明的折反式光瞳光轴传感器的光路布局图之二(半透半反镜,球面反射镜和平面反射镜布置形式的另一种);
28.图4是本发明的折反式光瞳光轴传感器的光路布局图之三(半透半反镜,球面反射镜和平面反射镜布置形式的另一种)。
29.其中,图1至图4中附图标记与部件名称之间的对应关系为:
30.1、半透半反镜;2、球面反射镜;3、平面反射镜;4、负光焦度透镜组;5、分光棱镜;6、衰减和滤光片组;7、光瞳透镜组;8、光瞳探测器;9、光轴探测器;10、光瞳面位置。
具体实施方式
31.为了能够更清楚地理解本发明的上述目的、特征和优点,下面结合附图和具体实施方式对本发明进行进一步的详细描述。需要说明的是,在不冲突的情况下,本技术的实施
例及实施例中的特征可以相互组合。
32.在下面的描述中阐述了很多具体细节以便于充分理解本发明,但是,本发明还可以采用其它不同于在此描述的方式来实施,因此,本发明的保护范围并不受下面公开的具体实施例的限制。
33.下面参照图1至图4来描述根据本发明一些实施例提供的折反式光瞳光轴传感器。
34.本技术的一些实施例提供了一种折反式光瞳光轴传感器。
35.如图2至图4所示,本发明第一个实施例提出了一种折反式光瞳光轴传感器,以进行光瞳面位置10的光束对准误差和光轴方向误差的检测,由半透半反镜1,球面反射镜2,平面反射镜3,负光焦度透镜组4,分光棱镜5,衰减和滤光片组6,光瞳透镜组7,光瞳探测器8,光轴探测器9组成。
36.其中,半透半反镜1,球面反射镜2,平面反射镜3组成前端光学系统,是反射元件折叠光路正光焦度聚焦光学系统,对大口径信号光束进行缩束聚焦;前端光学系统典型焦距0.3m~0.8m,较短的前端焦距设计有利于缩短光瞳光轴传感器光路长度,实现紧凑化。
37.此外,前端光学系统可以根据工程应用中的实际安装空间特点,采用不同的折叠光路布局(如图2至图4所示)以控制系统各方向的尺寸,实现系统有限空间内的紧凑化设计。
38.在本实施中,半透半反镜1是光学平板玻璃,靠近入射光束的一面镀减反膜以消除多次反射杂光;靠近球面反射镜2的一面镀半透半反分光膜;半透半反镜1透射的信号光束经球面反射镜2反射第二次到达半透半反镜1的光束,被反射到平面反射镜3方向,实现光路折叠。
39.在本实施中,球面反射镜2是凹球面反射镜2,由玻璃或金属材料制成,表面镀高反膜,具有使反射光束聚焦作用。
40.在本实施中,平面反射镜3是由玻璃或金属材料制成的平板,表面镀高反膜,用于光束方向转折,实现光路折叠,以控制传感器尺寸,缩小体积。在本实施例中,所述负光焦度透镜组4,是由两片或者多片透镜组成的消像差负光焦度透镜组4,与前端光学系统组合,消除光学系统视场中的球差、色差、彗差、像散等像差,并在较小的光路总长度内获得较长的等效焦距,以保证光瞳光轴传感器的探测精度。组合后总的等效焦距典型值1m~5m,可根据探测器分辨率需求选择合适的值。
41.在本实施例中,所述分光棱镜5是部分反射部分透射分光棱镜5,把信号光束分为两路,分别进入光瞳探测支路和光轴探测支路。
42.在本实施例中,所述衰减和滤光片组6由衰减片和滤光片组成,衰减片用于调整进入探测器的光强,滤光片用于滤出背景光以提高探测信噪比。
43.在本实施例中,所述光瞳透镜组7是由两片或者多片透镜组成的透镜组,使光瞳面成像到光瞳探测器8感光面,实现光瞳面处光束位置对准误差探测。
44.在本实施例中,所光瞳探测器8是高帧频ccd相机或cmos相机,用于探测光瞳面处的光束截面光斑强度分布,获得光瞳位置处的光束对准误差。
45.在本实施例中,所述光轴探测器9是高帧频相机或位置敏感探测器(psd),位于光学系统焦面处,用于探测激光束远场光强分布,获得光轴方向误差。
46.此外,光瞳光轴传感器可以有多种光路布局方式,图2至图4中给出了三种光路布
局实施例。各光路布局实施例的光路原理、系统组成是相同的,差别在于采用不同的光路折叠方式,实现光路空间布局的灵活性和紧凑化,根据工程应用中的安装空间位置约束,灵活选择光路布局方式,控制系统在各方向上的尺寸,满足应用环境有限安装空间内的尺寸约束。
47.如图2至图4所示,半透半反镜1,球面反射镜2,平面反射镜3组成光瞳光轴传感器前端光学系统,是反射元件折叠光路正光焦度聚焦光学系统,对来大口径信号光束进行缩束聚焦,前端光学系统典型焦距0.4m~0.6m,较短的前端焦距设计有利于缩短光瞳光轴传感器光路长度,减小体积重量。
48.由此可见,本发明的特点在于,采用半透半反镜1,球面反射镜2,平面反射镜3组成反射元件折叠光路前端光学系统,结合负光焦度透镜组4得到较长的等效焦距,获得高精度测量能力,并缩短系统总长度;通过分光棱镜5和后端元件,在一套设备内同时实现光瞳位置误差和光轴方向误差的测量;根据工程应用中的安装空间约束,灵活选择光路布局方式,控制系统在各方向上的尺寸,满足应用环境有限安装空间内的尺寸约束。系统结构紧凑,体积小,重量轻,精度高。
49.在一套设备内同时实现了运动平台宽频振动复杂环境搭载激光系统中激光器输出光束相对于望远镜的光瞳位置和光轴方向的测量,尺寸小重量轻,结构紧凑,精度高。
50.在本说明书中,对上述术语的示意性表述不一定指的是相同的实施例或实例。而且,描述的具体特征、结构、材料或特点可以在任何的一个或多个实施例或示例中以合适的方式结合。
51.凡在本发明的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。