1.本发明属于飞行控制技术领域,特别是一种针对控制能力弱的身管发射的制导炮弹、制导火箭的高精度弹道控制方法。
背景技术:
2.制导炮弹、制导火箭是现代兵器领域的重要发展方向,由于其射速快、机动灵活、携弹量大、可全天候作战,现代战争中仍极为重要,特别在现代军事斗争中,在策略上有其独特作用,但新形势、新环境下,对火炮、火箭的作战性能也提出了更高的要求,需要其在射程、精度和威力上进一步向前发展。
3.提高射击精度是制导炮弹和制导火箭发展的关注重点,其飞行控制系统是实现高精度打击的关键,飞行控制算法是飞行控制系统的核心。现在常用于制导炮弹、制导火箭的飞行控制算法为经典的pid控制和滑模控制、鲁棒控制、智能控制等控制理论与方法,这些通用的控制算法常与方案弹道跟踪、比例制导等方法结合来实现对目标的精确打击,通过计算飞行体与方案弹道对应的实时位置偏差进行弹道跟踪,需要飞行体提供较大的控制能力才能实现高精度方案弹道跟踪,这与管射的制导炮弹、制导火箭的飞行控制能力弱相矛盾,且随着其射程的不断提高,启控时刻的弹道偏差也逐步增大,如果飞行控制系统不能协调好较大弹道偏差和较小控制能力之间的问题,则将极大影响此类飞行体的制导控制精度。
4.在国内外文献中,目前还比较缺乏对于此类飞行体控制能力弱和较大控制偏差下如何实现精确控制的针对性研究,尤其是随着制导炮弹和制导火箭向超远射程发展,飞行过程中扰动带来的弹道偏差越来越大,但对飞行稳定性和控制精度的要求更高,这一研究将变得更为迫切。
技术实现要素:
5.本发明的目的在于提供一种基于落点预测和虚拟弹道跟踪的精确弹道控制方法,以实现控制能力较弱的飞行体,在较大弹道偏差下的精确控制。
6.实现本发明目的的技术解决方案为:
7.一种基于落点预测和虚拟跟踪的飞行体弹道控制方法,根据实际飞行中的弹道参数,预测出飞行体落点x
t
、z
t
和剩余飞行时间t
t
,并计算出理论落点和目标点的位置偏差
△
x,
△
z;
8.根据预估的落点偏差和飞行时间,计算出每秒需要消除的纵向位置偏差
△
x/t
t
和侧向位置偏差
△
z/t
t
,输出控制指令驱动舵机运动以消除误差;
9.飞行中根据飞行体的实时位置(xf、zf)、方案弹道位置(x
p
、z
p
)、对应时刻需要消除的纵向位置偏差和侧向位置偏差形成反馈控制,控制飞行体逐步消除弹道偏差,以消除预测落点和目标点的偏差为最终控制指标,生成最终的指令舵偏角,操纵飞行体姿态,使得飞行体按照指令要求的轨迹飞行。
10.本发明与现有技术相比,其显著优点是:
11.(1)通过对落点的预测,获得落点偏差,并基于落点偏差进行全程修正,确保了在较大偏差情况下,能够实现稳定逐步消除落点偏差。避免传统方案弹道跟踪方法需要实时对当前飞行器位置和方案弹道位置的对应偏差进行修正控制,引起控制能力不足导致弹道控制精度差的问题。
12.(2)基于空中实时飞行弹道数据,进行落点预测,确保了偏差修正的实时性和有效性,补充了可用控制参量,提高了控制性能。
13.(3)直接修正相对于目标落点的纵向偏差
△
x和横向偏差
△
z,避免了现有传统方法对y向弹道参数的跟踪和修正,减小了对飞行体控制能力的要求。
14.(4)飞行控制过程中,以平均的落点偏差量作为主要的控制参量,能够实现稳步消除偏差,确保弹体飞行稳定,减小飞行攻角,减少了飞行中的气动阻力,提高了落点速度,从而增强打击效果。
15.(5)控制过程中对落点偏差的逐步消除,确保了弹体稳定性,为末端中末制导交接创造了更加稳定的弹道环境,保证了不同导引律交接的弹体稳定性,为顺利转入末制导提供了良好的弹体稳定性。
附图说明
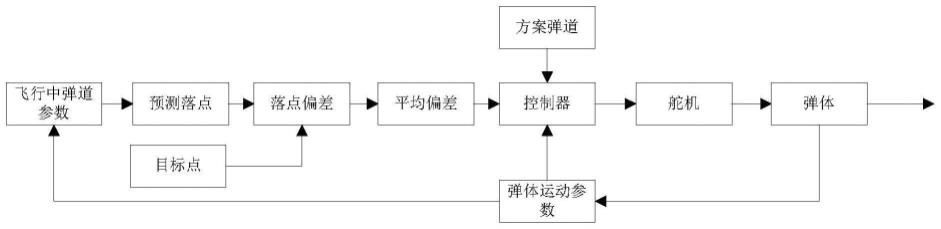
16.图1为制导回路系统原理框图。
具体实施方式
17.下面结合附图及具体实施例对本发明做进一步的介绍。
18.根据图1所示的控制流程,飞行体发射后,基于弹道上升段某时刻的弹道参数,根据弹道方程组,推算落点,计算出目标点和落点的弹道偏差及平均弹道偏差(落点偏差除以控制飞行时间)。控制器依据平均偏差、弹体运动参数及部分方案弹道参数,计算出控制指令,驱动舵机运动,舵面偏转,控制飞行体姿态,进而改变飞行轨迹,实现控制指标。
19.本发明通过根据实际飞行中的弹道参数,预测出飞行体落点x
t
、z
t
和剩余飞行时间t
t
,并计算出理论落点和目标点的位置偏差
△
x,
△
z。根据预估的落点偏差和飞行时间,计算出每秒需要消除的纵向
△
x/t
t
和侧向偏差
△
z/t
t
,飞行中根据飞行体的实时位置(xf、zf)、方案弹道位置(x
p
、z
p
)、对应时刻需要消除的纵向
△
xti/t
t
和侧向偏差
△
zti/t
t
形成反馈控制,控制飞行体逐步消除弹道偏差,以预测落点和目标点的偏差为最终控制指标,逼近目标点,在末端转入比例制导,实现对目标的精确打击。整个控制飞行过程,并不实时跟踪方案弹道,而是以逐步消除落点偏差为控制指标,实现以消除偏差为目的虚拟弹道的跟踪,兼顾飞行稳定和精确打击的双重目标,实现控制能力较弱的飞行体在较大偏差时候的精确弹道控制。具体包括以下步骤:
20.步骤1:采用雷达、卫星或者惯导等测量方式,测量并获得飞行体的弹道参数,这些弹道参数主要包含:飞行速度v、弹道倾角θ、弹道偏角将测得的弹道参数作为初始值,输入弹载计算机内的三自由度弹道方程,解算出预测飞行弹道,获得需要的弹道参数并保存在弹载存储器,用于控制的弹道参数包括:飞行体落点(x
t
、z
t
)和控制飞行时间t
t
、启控点至落点的间隔
△
t的弹道参数。
21.步骤2:计算出预测落点和目标点的纵向位置偏差
△
x,侧向位置偏差
△
z。根据预估的落点偏差和飞行时间,计算出每秒需要消除的纵向偏差
△
x/t
t
和侧向偏差
△
z/t
t
,飞行中根据飞行体的实时位置(xf、zf)、方案弹道位置(x
p
、z
p
)、对应时刻需要消除的纵向位置偏差
△
xti/t
t
和侧向位置偏差
△
zti/t
t
。其中
△
xti=|x
f-x
p
|,
△
zti=|z
f-z
p
|。
22.设目标点和预测落点得出需要控制的偏差ycdx=
△
x、ycdz=
△
z;
23.启控后每秒需要消除的纵向和侧向偏差ycddx=
△
x/tt、ycddz=
△
z/tt;
24.实际飞行的射程、侧偏和z向速度为factx,factz,factvz。
25.步骤3:根据实时测量的弹道参数、落点偏差和方案弹道,基于反馈控制原理,采用经典控制方法,可得飞行体纵向和横向的控制器表达式为:
26.delty=yckx*ycddx kx1*(ycddx*cont-(factx-ycprox)) kx2*det0;
27.deltz=yckz*ycddz kz1*(ycddz*cont-(factz-ycproz)) kdz*(-factvz);
28.式中delty,deltz分别为纵向和横向需求舵偏角;
29.ycddx,ycddz分别为单位时间需要消除的纵向和侧向偏差;
30.factx,factz,factvz分别为实际飞行的射程、侧偏和z向速度;
31.ycprox、ycproz分别为方案弹道对应的射程x和侧偏参数;
32.cont为当前飞行控制时间;
33.yckx,kx1,kx2为纵向控制系数;
34.yckz,kz1,kdz为横向控制系数;
35.det0为重力补偿角度。
36.控制器的组成中yckx*ycddx、yckz*ycddz为根据单位时间需要控制消除的偏差乘以控制参数作为主控制变量,通过调整控制参数的大小,使得飞行体快速稳定消除偏差,向目标落点逼近。
37.控制器中的kx1*(ycddx*cont-(factx-ycprox))、kz1*(ycddz*cont-(factz-ycproz))是根据当前时刻总共需要消除的位置偏差与当前时刻的实际位置偏差的差构成的控制变量,其主要用于补偿前期出现的跟踪误差,提高控制精度,通过调整控制参数来实现补偿量的大小。
38.控制器中的kx2*det0由生成方案弹道的方案舵偏角det0和控制参数组成,根据纵向和侧向的偏差量值来微调控制参数值,此项主要是随着侧向偏差的大小,调整补偿角度,使得在侧向较大偏差时,不要影响纵向的控制效果。
39.kdz*(-factvz)为根据侧向的速度大小来适当调整侧向的舵偏角,此项主要是增加侧向的阻尼,减少摆动,提高稳定性和跟踪精度。
40.步骤4:根据步骤3计算得到的横向和纵向舵偏角,根据舵机和控制或要求进行舵偏角限幅,并根据合力方向值和限幅后的舵偏角重新进行纵向和横向的舵偏角分配,生成最终的指令舵偏角,驱动舵机,控制舵翼偏转,操纵飞行体姿态,使得飞行体按照指令要求的轨迹飞行,实现稳定的高精度弹道控制。
41.本发明作为一种基于落点预测和虚拟弹道跟踪的精确弹道控制方法,以实现控制能力较弱的飞行体,在较大弹道偏差下的精确控制。通过对落点的预测,获得落点偏差,并通过控制过程中对落点偏差的逐步消除,确保了弹体稳定性,避免传统方案弹道跟踪方法需要实时对当前飞行器位置和方案弹道位置的对应偏差进行修正控制,引起控制能力不足
导致弹道控制精度差的问题,提高了远程制导炮弹、制导火箭等控制能力较弱的飞行体的飞行稳定性和弹道控制精度。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。