技术特征:
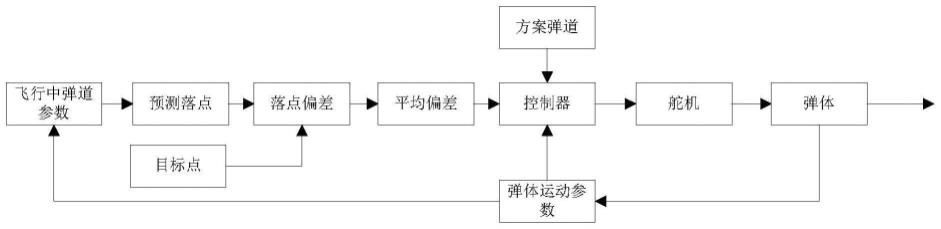
1.一种基于落点预测和虚拟跟踪的飞行体弹道控制方法,其特征在于,根据实际飞行中的弹道参数,预测出飞行体落点x
t
、z
t
和剩余飞行时间t
t
,并计算出理论落点和目标点的位置偏差
△
x,
△
z;根据预估的落点偏差和飞行时间,计算出每秒需要消除的纵向位置偏差
△
x/t
t
和侧向位置偏差
△
z/t
t
,输出控制指令驱动舵机运动以消除误差;飞行中根据飞行体的实时位置(x
f
、z
f
)、方案弹道位置(x
p
、z
p
)、对应时刻需要消除的纵向位置偏差和侧向位置偏差形成反馈控制,控制飞行体逐步消除弹道偏差,以消除预测落点和目标点的偏差为最终控制指标,生成最终的指令舵偏角,操纵飞行体姿态,使得飞行体按照指令要求的轨迹飞行。2.根据权利要求1所述的基于落点预测和虚拟跟踪的飞行体弹道控制方法,其特征在于,飞行体纵向和横向的控制器表达式为:delty=yckx*ycddx kx1*(ycddx*cont-(factx-ycprox)) kx2*det0;deltz=yckz*ycddz kz1*(ycddz*cont-(factz-ycproz)) kdz*(-factvz);式中delty,deltz分别为纵向和横向需求舵偏角;ycddx,ycddz分别为单位时间需要消除的纵向和侧向偏差;ycprox、ycproz分别为方案弹道对应的射程x和侧偏参数;factx,factz,factvz分别为实际飞行的射程、侧偏和z向速度;cont为当前飞行控制时间;yckx,kx1,kx2为纵向控制系数;yckz,kz1,kdz为横向控制系数;det0为重力补偿角度。3.根据权利要求1所述的基于落点预测和虚拟跟踪的飞行体弹道控制方法,其特征在于,弹道参数采用雷达、卫星或者惯导等测量方式测量。
技术总结
本发明提出了一种基于落点预测和虚拟跟踪的飞行体弹道控制方法,以实现控制能力较弱的飞行体,在较大弹道偏差下的精确控制。该方法通过根据实际飞行中的弹道参数,预测出飞行体理论落点X
技术研发人员:王旭刚 王中原 易文俊 史金光 常思江 陈琦
受保护的技术使用者:南京理工大学
技术研发日:2022.03.31
技术公布日:2022/7/15
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。