1.本技术涉及模组测量技术领域,特别涉及一种底面测量机构。
背景技术:
2.电池模组在生产的过程中,通常需要对模组底面的各项尺寸进行测量,以检测模组是否合格。目前,大多数需要测量的项目一般采用人工测量的方式进行,然而,一些关键尺寸在测量时,人工测量的难度较大,且检测效率低,测量结果的精度也无法保证。虽然也有采用设备对模组的尺寸进行检测,但是上述设备功能单一,往往只能测量某个尺寸,无法兼容多个测量项目。
技术实现要素:
3.本技术可提供一种底面测量机构,不仅可实现多个尺寸的测量,还可保证测量结果的精度,提高检测效率。
4.为了达到上述目的,本技术提供一种底面测量机构,包括:
5.底板;
6.安装于所述底板的移动模块,所述移动模块的至少一部分可相对所述底板沿第一方向移动,且所述移动模块的至少一部分可相对所述底板沿第二方向移动,且所述移动模块的至少一部分可相对所述底板沿第三方向移动,其中,所述第一方向、所述第二方向和所述第三方向之间两两垂直;
7.安装于所述移动模块的第一激光扫描仪和第二激光扫描仪,其中,所述第一激光扫描仪用于测量所述待测量模组的底面的第一参数,所述第二激光扫描仪用于测量所述待测量模组的底面的第二参数。
8.本技术提供的底面测量机构,通过设置移动模块、第一激光扫描仪和第二激光扫描仪,移动模块可相对底板实现第一方向、第二方向以及第三方向的移动,第一激光扫描仪和第二激光扫描仪安装于移动模块,从而可实现各方向上的移动。在对待测量模组进行测量时,可分别将第一激光扫描仪和第二激光扫描仪移动至对应的部位,从而使得第一激光扫描仪和第二激光扫描仪可分别用于测量待测量模组的底面的不同尺寸参数。由于第一激光扫描仪和第二激光扫描仪可移动,可完成对待测量模组的不同部位的测量,提高了兼容性,而采用激光扫描仪对待测量模组进行检测,还可保证检测精度,并且有利于提高检测效率。
附图说明
9.图1为本技术实施例中底面测量机构的一种结构示意图;
10.图2为本技术实施例中底面测量机构的又一种结构示意图。
11.图中:
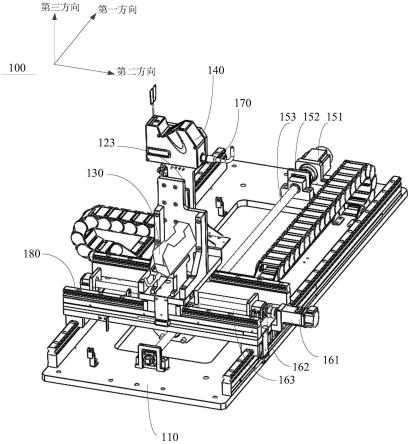
12.100-底面测量机构;110-底板;120-移动模块;121-第一移动板;122-第二移动板;
123-驱动直线模块;130-第一激光扫描仪;140-第二激光扫描仪;150-第一驱动机构;151-第一驱动电机;152-第一联轴器;153-第一驱动丝杠;160-第二驱动机构;161-第二驱动电机;162-第二联轴器;163-第二驱动丝杠;170-第一直线导轨;180-第二直线导轨。
具体实施方式
13.下面将结合本实用新型实施例中的附图,对本实用新型实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本实用新型一部分实施例,而不是全部的实施例。基于本实用新型中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本实用新型保护的范围。
14.由于在对模组的底面进行测量时,大多数需要测量的项目一般采用人工测量的方式进行,然而,一些关键尺寸在测量时,人工测量的难度较大,且检测效率低,测量结果的精度也无法保证。虽然也有采用设备对模组的尺寸进行检测,但是上述设备功能单一,往往只能测量某个尺寸,无法兼容多个测量项目。
15.基于此,本技术实施例可提供一种底面测量机构100,用于对待测量模组的底面的各项参数进行测量,不仅可兼容多个测量项目,还可保证检测精度,提高检测效率。以下将结合具体的实施例以及附图对上述底面测量机构进行说明。
16.参考图1和图2,底面测量机构100可包括底板110、移动模块120、第一激光扫描仪130和第二激光扫描仪140。其中,移动模块120安装于底板110,移动模块120的至少一部分可相对底板110沿第一方向移动,并且移动模块120的至少一部分可相对底板110沿第二方向移动,并且移动模块120的至少一部分可相对底板110沿第三方向移动,上述第一方向、第二方向以及第三方向之间两两垂直。需要说明的是,移动模块120的至少一部分可相对底板110沿第一方向移动,可理解为,移动模块120整体可相对底板110沿第一方向移动,或者,移动模块120的某个结构或部分结构可相对底板110沿第一方向移动。同样地,移动模块120的至少一部分可相对底板110沿第二方向或第三方向移动也是如此,这里不再赘述。
17.第一激光扫描仪130和第二激光扫描仪140均安装于移动模块120,并且可在移动模块120的带动下实现第一方向和/或第二方向和/或第三方向的移动,以便于能够移动至对应的部位,从而对待测量模组的底面进行测量。其中,第一激光扫描仪130可用于测量待测量模组的底面的第一参数,第二激光扫描仪140可用于测量待测量模组的底面的第二参数,待测量模组的第一参数和第二参数可包括但不限于以下参数:模组底面平面度、模组端板底部装配平面度、安装孔之间沿第一方向的距离、安装孔之间沿第二方向的距离、端板抬脚高度(也可理解为端板的底面与模组的底面之间的距离),等等。
18.可以理解的是,本技术实施例中的底面测量机构100在对待测量模组的底面参数进行测量时,底面测量机构100正对于待测量模组的底面,也即待测量模组不管是正常放置,还是侧放或者倒放,等等,底面测量机构100均可对待测量模组的底面进行测量。作为一种实现方式,本技术实施例中的待测量模组的结构可包括两个端板、两个侧板以及多个电池,两个端板相对放置,每一个侧板的一端连接一个端板,另一端连接另一个端板,从而形成一个框体,而电池放置于框体内,以形成一个模组。这时,模组在正常放置情况下用于承载电池的端板或侧板可理解为底部,而底部背离电池的一侧表面即可理解为底面。
19.移动模块120可包括第一移动板121、第二移动板122、驱动直线模块123以及连接
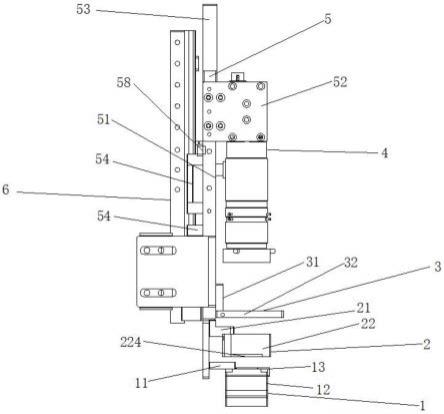
板(图中未示出)。其中,第一移动板121安装于底板110上,并且可相对底板110沿第一方向移动,同时,第一移动板121还可沿第二方向延伸。第二移动板122可安装于第一移动板121,并且可相对第一移动板121沿第二方向移动。驱动直线模块123可安装于第二移动板122,并且驱动直线模块123可沿第三方向延伸,连接板可相对驱动直线模块123沿第三方向移动地安装于驱动直线模块123。而第一激光扫描仪130可安装于第二移动板122,并且可用于测量待测量模组的底部平面度,第二激光扫描仪140可安装于连接板,并且可用于测量待测量模组的端板底部装配平面度、安装孔之间沿第一方向的距离、安装孔之间沿第二方向的距离、端板抬脚高度。
20.另外,移动模块120还可包括用于驱动第一移动板121沿第一方向移动的第一驱动机构150以及用于驱动第二移动板122沿第二方向移动的第二驱动机构160,其中,第一驱动机构150可安装于底板110,第二驱动机构160可安装于第一移动板121。
21.作为一种实现方式,第一驱动机构150可包括第一驱动丝杠153、第一驱动电机151以及第一联轴器152。第一驱动电机151可以为伺服电机,其具有动力输出轴,该动力输出轴可通过第一联轴器152与第一驱动丝杠153连接,从而将动力输出给第一驱动丝杠153,使得第一驱动丝杠153可绕自身轴线转动。另外,底板110上还可设置沿第一方向延伸的第一直线导轨170,第一直线导轨170设有滑块,第一移动板121可安装于滑块,并且第一移动板121可通过丝母座连接于第一驱动丝杠153,从而使得将第一驱动丝杠153的旋转运动通过丝母转换为第一移动底板110沿第一方向的直线运动,以便于驱动第一移动板121快速沿第一方向移动。
22.类似的,作为一种实现方式,第二驱动机构160可包括第二驱动丝杠163、第二驱动电机161以及第二联轴器162。第二驱动电机161可以为伺服电机,其具有动力输出轴,该动力输出轴可通过第二联轴器162与第二驱动丝杠163连接,从而将动力输出给第二驱动丝杠163,使得第二驱动丝杠163可绕自身轴线转动。另外,第一移动板121上还可设置沿第二方向延伸的第二直线导轨180,第二直线导轨180设有滑块,第二移动板122可安装于滑块,并且第二移动板122可通过丝母座连接于第二驱动丝杠163,从而使得将第二驱动丝杠163的旋转运动通过丝母转换为第二移动底板110沿第二方向的直线运动,以便于驱动第二移动板122快速沿第二方向移动,从而带动第一激光扫描仪130移动。
23.作为一种实现方式,驱动直线模块123可包括相对设置的第三直线导轨(图中未示出),每一条第三直线导轨可沿第三方向延伸,而连接板可通过与第三直线导轨之间通过滑块滑动连接配合,并在伺服电机的驱动下实现沿第三方向的移动,从而带动第二激光扫描仪140移动。
24.本技术实施例中的底面测量机构100对于待测量模组底面的测量过程可参考以下说明:
25.当带测量模组到达测量位置时,第一驱动电机151通过第一联轴器152和第一驱动丝杠153转动,以驱动第一移动板121在第一直线导轨170上沿第一方向移动到第一个测量工位,然后驱动直线模块123带动第二激光扫描仪140沿第三方向移动到程序设定位置,然后由第二驱动电机161通过第二联轴器162和第二驱动丝杠163转动,以驱动第二移动板122沿第二方向移动,并带动第二激光扫描仪140沿第二方向移动,从而实现对一侧端板的底部装配平面度、安装孔之间沿第二方向的距离、端板抬脚高度的测量。
26.当上述测量结束后,第一驱动电机151通过第一驱动丝杠153带动第一移动板121沿第一方向移动,带动第二激光扫描仪140沿第一方向移动到另一侧的端板测量位置,这时,第二驱动电机161带动第二激光扫描仪140沿第二方向往回移动,实现对另一侧端板的底部装配平面度、安装孔之间沿第二方向的距离、端板抬脚高度的测量。
27.当上述测量结束后,这时驱动直线模块123带动第二激光扫描仪140退回到初始位置,第二移动板122位置锁定,第一驱动电机151带动第一移动板121沿第一方向移动,从而带动第一激光扫描仪130移动,以实现对待测量模组的底面平面度的测量。
28.显然,本领域的技术人员可以对本实用新型实施例进行各种改动和变型而不脱离本实用新型的精神和范围。这样,倘若本实用新型的这些修改和变型属于本实用新型权利要求及其等同技术的范围之内,则本实用新型也意图包含这些改动和变型在内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。