1.本实用新型属于无人驾驶洒水车技术领域,特别是涉及一种无人驾驶洒水车的自动补水装置。
背景技术:
2.随现有无人技术的发展,像洒水车这种简单却又枯燥无味的行驶时车辆,完全可以使用无人驾驶车辆代替人工驾驶车辆,然而现有无人驾驶车辆缺少自动补水机构,当水罐内水洒完后,需返回供水站点人工补水,较为耗时且洒水成本较高。
技术实现要素:
3.本实用新型的目的在于提供一种无人驾驶洒水车的自动补水装置,解决了现有无人驾驶车辆缺少自动补水机构需返回供水站点人工补水的技术问题。
4.为达上述目的,本实用新型是通过以下技术方案实现的:
5.一种无人驾驶洒水车的自动补水装置,包括第一u型架、转动配合在所述第一u型架内下部的支撑框、转动配合在所述支撑框一端的第二u型架、装设在所述第二u型架一端的导向板,所述第二u型架内滑动配合有硬管,所述硬管一端转动配合有连接法兰;
6.所述导向板上装设有第一电机,所述第一电机的输出端伸入所述导向板内的部分连接有圆形板,所述圆形板下部周向阵列有多个斜杆。
7.可选的,所述支撑框上表面转动配合有连接板,且所述连接板与所述第二u型架转动配合,所述支撑框与所述第二u型架之间有间隙。
8.可选的,所述第二u型架相对内壁两侧均开设有缺口,所述硬管周侧固定套设有滑动配合在两所述缺口内的滑动框,所述第二u型架上部内壁装设有板体,且所述板体与所述滑动框之间装设有电动推杆。
9.可选的,所述硬管侧部装设有第二电机,所述第二电机输出端装设有齿轮,且所述齿轮与所述连接法兰啮合。
10.可选的,所述硬管靠近所述连接法兰的一端开设有环形槽,所述连接法兰一端装设有转动配合在所述环形槽内的限位环,且所述环形槽、所述限位环竖截面均为l形,所述导向板为u型板状结构,且所述u型板的厚度从远离所述第二u型架的一端向靠近所述第二u型架的一端逐渐变厚。
11.可选的,所述第一u型架一侧内壁装设有第三电机,所述第三电机输出端装设有收卷辊,且所述收卷辊一端转动配合在所述第一u型架的一侧内壁上,所述收卷辊周侧缠绕有拉绳,且所述拉绳一端与所述第一电机连接,所述第一u型架一侧内壁装设有与所述第二u型架相对应的弹簧。
12.本实用新型的实施例具有以下有益效果:
13.本实用新型的一个实施例通过在设置支撑框转动第一u型架内,第二u型架转动配合在支撑框的一端,进而第二u型架可以水平转动和竖直转动,在导向板转动到消防栓上
方,导向板通过其内壁与消防栓水阀把手配合,引导第二u型架、导向板水平转动,进而使多个斜杆插入消防栓上水阀的把手孔内,降低洒水车停位偏差导致斜杆无法插入消防栓上水阀的把手孔内开启水阀的几率,滑动硬管使连接法兰插入消防栓上的连接法兰内时,第二u型架水平、竖直转动,以平衡连接法兰与消防栓的对准偏差,进而提高硬管通过连接法兰与消防栓连接的成功率,通过连接法兰与消防栓连接,第一电机驱动多个斜杆打开消防栓,进而便于为洒水车水罐内补水。
14.当然,实施本实用新型的任一产品并不一定需要同时达到以上所述的所有优点。
附图说明
15.构成本技术的一部分的说明书附图用来提供对本实用新型的进一步理解,本实用新型的示意性实施例及其说明用于解释本实用新型,并不构成对本实用新型的不当限定。在附图中:
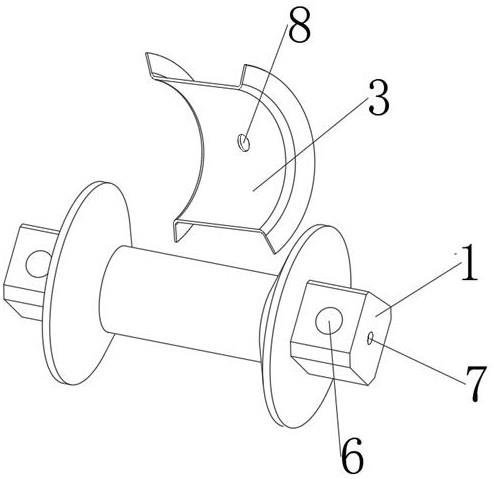
16.图1为本实用新型一实施例的立体结构示意图;
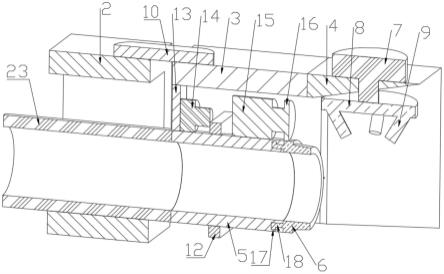
17.图2为本实用新型一实施例的剖视图;
18.图3为本实用新型一实施例的第二u型架剖视图。
19.其中,上述附图包括以下附图标记:
20.第一u型架1,支撑框2,第二u型架3,导向板4,硬管5,连接法兰6,第一电机7,圆形板8,斜杆9,连接板10,缺口11,滑动框12,板体13,电动推杆14,第二电机15,齿轮16,环形槽17,限位环18,第三电机19,收卷辊20,拉绳21,弹簧22,进水软管23。
具体实施方式
21.下面将结合本实用新型实施例中的附图,对本实用新型实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅是本实用新型一部分实施例,而不是全部的实施例。以下对至少一个示例性实施例的描述实际上仅仅是说明性的,决不作为对本实用新型及其应用或使用的任何限制。
22.为了保持本实用新型实施例的以下说明清楚且简明,本实用新型省略了已知功能和已知部件的详细说明。
23.请参阅图1-3所示,在本实施例中提供了一种无人驾驶洒水车的自动补水装置,包括:第一u型架1、转动配合在第一u型架1内下部的支撑框2、转动配合在支撑框2一端的第二u型架3、装设在第二u型架3一端的导向板4,第二u型架3内滑动配合有硬管5,硬管5一端转动配合有连接法兰6;
24.导向板4上装设有第一电机7,第一电机7的输出端伸入导向板4内的部分连接有圆形板8,圆形板8下部周向阵列有多个斜杆9,第一u型架1上设有与第二u型架3相对应的圆角,便于收回第二u型架3时,引导第二u型架3进入第一u型架1内。
25.其中,第一u型架1装设在洒水车侧部,洒水车内的进水软管23穿过支撑框2与硬管5连接。
26.本实施例一个方面的应用为:当无人驾驶洒水车通过内置的液位计检测到水罐内水位不足时,车内无人驾驶系统通过网络连接到道路建设网站内,查看附近消防栓的位置,并行驶至附近的消防栓旁;
27.然后从第一u型架1内转出支撑框2、第二u型架3、导向板4,使导向板4转动到消防栓上方,多个斜杆9插入消防栓上水阀的把手孔内,然后滑动硬管5使连接法兰6插入消防栓上的连接法兰内,然后转动连接法兰6,使硬管5与消防栓紧密连接;
28.第一电机7带动圆形板8转动,进而通过多个斜杆9带动消防栓上的水阀转动,进而打开水阀为洒水车水罐内补水,反向上述操作,即可关闭水阀,并将支撑框2、第二u型架3、导向板4收回第一u型架1内。需要注意的是,本技术中所涉及的所有用电设备均可通过蓄电池供电或外接电源。
29.通过在设置支撑框2转动配合在第一u型架1内,第二u型架3转动配合在支撑框2的一端,进而第二u型架3可以水平转动和竖直转动,在导向板4转动到消防栓上方,导向板4通过其内壁与消防栓水阀把手配合,引导第二u型架3、导向板4水平转动,进而使多个斜杆9插入消防栓上水阀的把手孔内,降低洒水车停位偏差导致斜杆9无法插入消防栓上水阀的把手孔内开启水阀的几率,滑动硬管5使连接法兰6插入消防栓上的连接法兰内时,第二u型架3水平、竖直转动,以平衡连接法兰6与消防栓的对准偏差,进而提高硬管5通过连接法兰6与消防栓连接的成功率,通过连接法兰6与消防栓连接,第一电机7驱动多个斜杆9打开消防栓,进而便于为洒水车水罐内补水。
30.请参阅图2所示,本实施例的支撑框2上表面转动配合有连接板10,且连接板10与第二u型架3转动配合,支撑框2与第二u型架3之间有间隙,连接板10的两端分别与支撑框2、第二u型架3转动配合,便于在支撑框2转出第一u型架1后第二u型架3可以水平摆动,便于导向板4通过其内壁与消防栓水阀把手配合,引导第二u型架3、导向板4水平转动,降低洒水车停位偏差导致斜杆9无法插入消防栓上水阀的把手孔内开启水阀的几率;请参阅图2-3所示,第二u型架3相对内壁两侧均开设有缺口11,硬管5周侧固定套设有滑动配合在两缺口11内的滑动框12,第二u型架3上部内壁装设有板体13,且板体13与滑动框12之间装设有电动推杆14,便于通过电动推杆14推动滑动框12滑动,以使硬管5带动连接法兰6插入消防栓上的连接法兰内;
31.请参阅图2所示,本实施例的硬管5侧部装设有第二电机15,第二电机15输出端装设有齿轮16,连接法兰6外侧周向阵列有与齿轮16相对应的多个轮齿,且齿轮16与连接法兰6啮合,便于第二电机15通过齿轮16带动连接法兰6转动,进而使连接法兰6与消防栓上的连接法兰紧密连接。
32.请参阅图2所示,本实施例的硬管5靠近连接法兰6的一端开设有环形槽17,连接法兰6一端装设有转动配合在环形槽17内的限位环18,且环形槽17、限位环18竖截面均为l形,便于增加连接法兰6转动时的稳定性;导向板4为u型板状结构,且u型板的厚度从远离第二u型架3的一端向靠近第二u型架3的一端逐渐变厚,便于引导第二u型架3转动适应消防栓的位置。
33.请参阅图1所示,本实施例的第一u型架1一侧内壁装设有第三电机19,第三电机19输出端装设有收卷辊20,且收卷辊20一端转动配合在第一u型架1的一侧内壁上,收卷辊20周侧缠绕有拉绳21,且拉绳21一端与第一电机7连接;便于通过第三电机19拉绳21拉动第一电机7,进而控制支撑框2、第二u型架3、导向板4的转动位置,第一u型架1一侧内壁装设有与第二u型架3相对应的弹簧22,便于推动第二u型架3滑出第一u型架1。
34.其中,第一电机7、第二电机15、第三电机19、电动推杆14均与无人驾驶洒水车的车
载无人驾驶系统电连接,进而车载无人驾驶系统通过本装置和车载多线激光雷达和摄像头配合,实现无人驾驶系统自动控制本装置为无人驾驶洒水车的水罐补水。
35.上述实施例可以相互结合。
36.需要说明的是,本技术的说明书和权利要求书及上述附图中的术语“第一”、“第二”等是用于区别类似的对象,而不必用于描述特定的顺序或先后次序。应该理解这样使用的数据在适当情况下可以互换,以便这里描述的本技术的实施方式能够以除了在这里图示或描述的那些以外的顺序实施。
37.在本实用新型的描述中,需要理解的是,方位词如“前、后、上、下、左、右”、“横向、竖向、垂直、水平”和“顶、底”等所指示的方位或位置关系通常是基于附图所示的方位或位置关系,仅是为了便于描述本实用新型和简化描述,在未作相反说明的情况下,这些方位词并不指示和暗示所指的装置或元件必须具有特定的方位或者以特定的方位构造和操作,因此不能理解为对本实用新型保护范围的限制;方位词“内、外”是指相对于各部件本身的轮廓的内外。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。