1.本案是与气体动力学运用于物体输送的方法及系统有关。
背景技术:
2.日常生活中有各式各样的物体需要被输送,其中,散装物体的输送需求存在于各领域,例如矿石、煤炭、谷物、砂石、水泥、食材甚至是各种工业原料的粉状、粒体物体输送。目前,用来输送散装物体的方法依据输送原理大致可以分为机械输送、流体管道输送以及容器输送三大类。
3.其中,容器输送需大量人力配合因此无法完全自动化完成。机械输送涉及复杂的机构配置,适用上常受到空间需求的限制,且也较无法避免产生周遭环境的污染。流体管道输送则可以在封闭的管道内以流体作为载体以运输物体,输送效率高、占地小、成本低、污染少且可完全自动化。
4.在实际运用上,可以根据被传输物体的材料特性来选择使用的输送方式,而由于流体管道输送方式具有如前所述的优异特性,使得流体管道输送成为目前最被广泛使用的物体输送方式之一。
5.流体管道输送根据输送载体的不同又可分为液态介质输送或是气态介质输送。其中,以气态介质输送物体的流体管道输送是依据气体动力学运用于物体输送。以自动化连续制程的生产程序中需经过多次转化的大量粉体、粒体物体来说,其物体体积小(0.5~10mm3)、单体重量极轻且易受气体吹动,因此,粉状、粒体物体特别适用于以气态介质依据气体动力学运用于物体输送。
6.气体动力学运用于微型物体输送的输送效率高、易于实现自动化且不易造成环境污染。然而,该微型物体经由气体在管网内移动时,其细小颗粒可能彼此碰撞、与管壁撞击而呈现不规则性随机小范围移动,额外耗损气体供给物体的动能,且当气体动力学运用于物体输送所输送尺寸不一、性质不均匀的粉状、粒状物体,或是输送管道转折点较多时,所需的气体流量与对应压力若小于管道输送时的气体动力耗损、气体压力耗损,使得物体可能在输送管道内产生堵塞的不确定性风险,一旦堵塞状况无法排除时,操作人员即必须停机进行清管的动作,极为费时,且若无法及时处置输送管道内的堵塞现象,将可能导致输送管道持续受压而损坏,如此将会造成无法预期的损失并大幅提高后续生产成本。
技术实现要素:
7.本案提供一种智能物体输送方法,适于以气体输送物体,包含以下步骤。将气体以第一输送量输入输送管,将物体以第一供料量输入输送管;侦测输送管内的工作气压值;当工作气压值于第一时间区段内上升至第一预设压力值时发送过压预警信号;依据过压预警信号将物体输入输送管的第一供料量降低至第二供料量,并且将气体输入输送管的第一输送量提升至第二输送量;当工作气压值于第二时间区段内由第一预设压力值下降至安全压力值时发送稳态信号;以及依据稳态信号将物体输入输送管的第二供料量提升至第一供料
量。
8.于一实施例中,当该工作气压值于一第三时间区段内由该安全压力值下降至一第二预设压力值时发送一失压预警信号。
9.于一实施例中,当该工作气压值由该第一预设压力值上升至一设备承受压力值时,停止将气体输入该输送管。
10.于一实施例中,还包含侦测该输送管的一震动值,当该震动值大于一警戒震动值时,改变将气体输入该输送管的输送量。
11.本案也提供一种智能物体输送系统,包含输送管、入料装置、气体源、压力侦测装置、压力预警模块以及智能控制模块。入料装置连接输送管以输入物体。气体源连接输送管以输入气体。压力侦测装置设置于输送管以量测输送管内的工作气压值。压力预警模块耦接于压力侦测装置,用以当工作气压值在第一时间区段内上升至第一预设压力值时发送过压预警信号,并且在当工作气压值在第二时间区段内由第一预设压力值下降至安全压力值时发送稳态信号。智能控制模块耦接于入料装置、气体源及压力预警模块,用以根据过压预警信号控制入料装置将物体输入输送管的第一供料量降低至第二供料量,同时控制气体源将气体输入输送管的第一输送量提升至第二输送量,并根据稳态信号将物体的第二供料量提高至第一供料量。
12.于一实施例中,该压力预警模块包含一储存装置,用以储存该第一供料量、该第二供料量、该第一输送量、该第二输送量、该第一预设压力值、该安全压力值、该第一时间区段以及该第二时间区段的值。
13.于一实施例中,该压力预警模块包含一比较器,用以接收该压力侦测装置侦测的该工作气压值并根据该工作气压值比对该第一预设压力值及该安全压力值。
14.于一实施例中,该压力预警模块包含一计时器,用以记录该压力侦测装置侦测的该工作气压值对应的时间。
15.于一实施例中,该压力侦测装置设置于该输送管的弯折处。
16.于一实施例中,该输送管包含多个管段及一分歧阀,该多个管段连接于该分歧阀,该压力侦测装置设置于对应该分歧阀的位置。
17.于一实施例中,该分歧阀包含多个法兰,该压力侦测装置设置于对应该多个法兰的位置。
18.于一实施例中,还包含一震动感知器,设置于该输送管并耦接于该智能控制模块。
19.借此,在输送管输送物体过程中的工作气压值、气体流量、物体输送量得以被即时监控,并可以在即将发生物体阻塞前示警及处置,避免整体系统因物体阻塞而扩大损害,可智能调节较佳输送策略用于稳定、节能气力系统。
附图说明
20.图1为本案智能物体输送系统的一实施例的系统架构示意图;
21.图2为本案智能物体输送方法的一实施例的流程示意图;
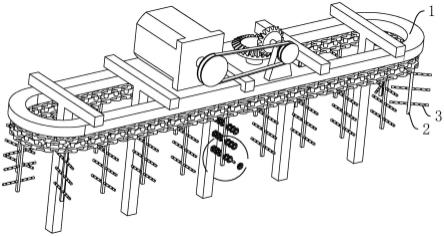
22.图3为本案智能物体输送系统的一实施例的示意图;
23.图4为本案智能物体输送系统的压力预警模块的一实施例的示意图。
24.【符号说明】
25.10:气体源
26.20:输送管
27.30:入料装置
28.40:压力侦测装置
29.50:压力预警模块
30.51:储存装置
31.52:比较器
32.53:计时器
33.54:显示器
34.60:智能控制模块
35.70:震动感知器
36.t:管段
37.f:法兰
38.m:分歧阀
39.步骤s01:将气体及物体输入输送管
40.步骤s02:侦测输送管内的工作气压值
41.步骤s03:当工作气压值于第一时间区段内上升至第一预设压力值时发送过压预警信号
42.步骤s04:依据过压预警信号降低物体的供料量,并且提高气体的输送量
43.步骤s05:当工作气压值于第二时间区段内由第一预设压力值下降至安全压力值时发送稳态信号
44.步骤s06:依据稳态信号提高物体的供料量
具体实施方式
45.请配合参阅图1为本案智能物体输送系统的一实施例的系统架构示意图。图2为本案智能物体输送方法的一实施例的流程示意图。本案智能物体输送系统所执行的智能物体输送方法是以气体动力学运用于物体输送(pneumatic conveyer)的方式来输送粉状、粒状物体。透过在输送物体的工作过程中持续监测输送管20内的气压或震动状态以即时发现异常状况,并在异常状况发生时施以排除作为,避免异常状况的扩大而产生无法预期的损失。在此,气体动力学运用于物体输送的种类不限于是稀相输送(低输送压力、高输送速度)、中相输送(中输送压力、高输送速度)或是密相输送(高输送压力、低输送速度)。
46.请参阅图1,本案智能物体输送系统的一实施例包含气体源10、输送管20、入料装置30、压力侦测装置40、压力预警模块50及智能控制模块60。气体源10及入料装置30分别连接输送管20以输入气体及物体。压力侦测装置40设置于输送管20以量测输送管20内的工作气压值。压力预警模块50耦接于压力侦测装置40并用以当工作气压值在第一时间区段内上升至第一预设压力值时发送过压预警信号,并且在当工作气压值在第二时间区段内由第一预设压力值下降至安全压力值时发送稳态信号。智能控制模块60耦接于入料装置30、气体源10及压力预警模块50,用以根据过压预警信号控制入料装置30将物体输入输送管20的第一供料量降低至第二供料量,同时控制气体源10将气体输入输送管20的第一输送量提升至
第二输送量,并根据稳态信号将物体的第二供料量提高至第一供料量。
47.参阅图2,一实施例中,智能物体输送方法适于以气体输送物体并且包含以下步骤:将气体及物体输入输送管20(步骤s01)。侦测输送管20内的工作气压值(步骤s02)。当工作气压值于第一时间区段内上升至第一预设压力值时发送过压预警信号(步骤s03)。依据过压预警信号降低物体的供料量,并且提高气体的输送量(步骤s04)。当工作气压值于第二时间区段内由第一预设压力值下降至安全压力值时发送稳态信号(步骤s05)。依据稳态信号提高物体的供料量(步骤s06)。
48.借此,透过持续侦测输送管20内的工作气压值,而能在输送管20内的输送工作发生异常时由工作气压值来即时获知异常状况,并且依据异常状况即时处置,而能在异常状况发生的初始阶段快速排除,避免异常状况扩大而造成更严重的损害及维护费用的产生。
49.在将气体及物体输入输送管20(步骤s01)的一实施例中,可以是由智能物体输送系统的入料装置30来输入物体,由气体源10输入气体。于此,气体源10可以是以第一输送量将气体输入输送管20,而入料装置30可以是以第一供料量将物体输入输送管20。
50.一实施例中,第一输送量及第一供料量可以由操作者手动设定,但本案不以此为限。
51.参阅图1,一实施例中,第一输送量及第一供料量也可以由智能控制模块60所控制。在此实施例中,压力预警模块50可以是包含储存装置51。储存装置51用以储存第一供料量、第一输送量、第一预设压力值及安全压力值,第一预设压力值大于安全压力值。一实施例中,储存装置51可以但不限于是任何型态的固定或可移动随机存取记忆体(random access memory,ram)、只读记忆体(read-only memory,rom)、快闪记忆体(flash memory)、硬盘(hard disk drive,hdd)、固态硬盘(solid state drive,ssd)或类似元件或上述元件的组合。
52.参阅图3及图4,一实施例中,智能物体输送系统的压力预警模块50可以同时包含显示器54。于此,智能控制模块60可于显示器54上显示操作界面以供操作者选择所输送物体及其性质。当操作者选择所欲输送的物体后,智能控制模块60即能依据操作者所选物体于储存装置51读取对应物体的第一供料量及气体的第一输送量,并根据所读取的第一供料量及第一输送量控制入料装置30及气体源10输入物体及气体。于此实施例中,第一输送量及第一供料量可以是依据气体动力学运用于物体输送装置输送相同物体或具有相似特性的物体的历史输送经验所设定,但本案并不以此为限。
53.进一步地,第一预设压力值为输送管20内可能开始发生物体堆积的预设压力值。输送管20内发生物体堆积的状况通常会发生在一个时间区段内,渐进式地累积物体,因此,当输送管20内的工作气压值在一个时间区段内上升至第一预设压力值时,输送管20内大多已发生物体阻塞的状况,前述工作气压值上升至第一预设压力值的时间区段即为第一时间区段。
54.当工作气压值于第一时间区段内上升至第一预设压力值时,压力预警模块50发出过压预警信号,且智能控制模块60收到过压预警信号之后,压力预警模块50依据过压预警信号判断输送管20可能开始发生物体阻塞的状况,并据此输出过压预警信号至智能控制模块60,而智能控制模块60即能依据过压预警信号将物体输入输送管20的第一供料量降低至第二供料量,减缓物体输入输送管20的供料量,并且将气体输入输送管20的第一输送量提
升至第二输送量,提高气体输入输送管20的输送量,让较多的气体推送较少的物体,提高物体被推动的可能,借以使输送管20内可能即将发生堆积物体或已堆积的少量物体的状况被排除。
55.参阅图1及图4,一实施例中,压力预警模块50可以是包含比较器52及计时器53。比较器52用以接收压力侦测装置40侦测的工作气压值并根据工作气压值比对第一预设压力值及安全压力值。计时器53用以记录压力侦测装置40侦测的每一工作气压值对应的时间,并能计算出两工作气压值之间对应的时间区间。
56.当输送管20内的积料现象逐渐被排除时,输送管20内的气体流动的状态会由阻塞状态渐渐地变得顺畅,因此,输送管20内的工作气压值的状态便会在一个持续的时间内渐渐地降低回复至安全压力值,而前述工作气压值回复至安全压力值的持续时间即可设定为第二时间区段。
57.也就是说,当输送管20内的工作气压值在第二时间区段内由第一预设压力值下降至安全压力值时,压力预警模块50判断输送管20内的积料状况已被排除,并据以发出稳态信号,智能控制模块60收到稳态信号后,便能依据稳态信号将物体输入输送管20的第二供料量提升至第一供料量,借以使输送物体的输送量回归到预设值。
58.具体而言,排除积料的持续时间通常会大于发生积料的时间,因此,于一实施例中,第二时间区段大于第一时间区段。第一时间区段可以是小于3秒,而第二时间区段可以是15~20秒,但本案不以此为限。
59.进一步地,当输送管20内发生积料且无法排除时,输送管20内的工作气压值将上升至第一预设压力值且无法下降,为了避免持续积料对于输送管20或整体系统产生伤害,压力预警模块50的储存装置51还储存一预设时间,比较器52依据计时器53的计时以及压力侦测装置40侦测的压力值,当工作气压值上升至第一预设压力值并且持续预设时间后,判断输送管20内的积料并未被排除,则智能控制模块60即能依此判断结果停止入料装置30继续将物体输入输送管20,而气体源10则提高气体流量,持续将气体输入输送管20,借此使气体源10持续输入气体推送原本就存在于输送管20内的物体,再更提高推动物体、排除积料的可能。于此实施例中,智能控制模块60是将气体输入输送管20的第二输送量提升至第三输送量。
60.而当入料装置30已停止将物体输入输送管20,且持续输入气体仍无法排除积料的状况时,代表输送管20内的积料可能非常密实而无法被推动,若气体持续输入输送管20可能导致输送管20内的气压持续上升而损坏输送管20或整体系统。因此,在此实施例中,压力预警模块50的储存装置51还储存一设备承受压力值。设备承受压力值为智能物体输送系统设计时依据系统架构、材料所设定的预设值。借此,压力预警模块50即能在当工作气压值由第一预设压力值上升至设备承受压力值时,判断输送管20内的气压已达临界值,则智能控制模块60便依据此判断结果控制气体源10及入料装置30停止输入气体及物体,避免继续将气体及物体输入输送管20造成输送管20或整体系统难以修复的损毁。
61.一实施例中,入料装置30可以是由入料斗及旋转供料阀所组成。物体容置于入料斗内,入料斗具有入料口及排料口,旋转供料阀设置于排料口以接收由入料斗输出的物体并且进行供料。
62.一实施例中,旋转供料阀主要是由壳体及叶轮所组成,壳体具有进料口及出料口,
叶轮包含多个环设的叶片,叶轮容置于壳体内并且位于进料口与出料口之间。于此,入料斗内的物体可以通过重力由入料斗的排料口经旋转供料阀的进料口输入旋转供料阀,当物体输入旋转供料阀内时可以充满于叶轮的叶片间的空间。随着叶轮转动,当叶轮上存有物体的位置对应至出料口的位置时,物体得以由出料口排出。在此实施例中,透过旋转供料阀将物体输入输送管20的方式可以产生锁住气流、避免气流逆流的效果,而能确保智能物体输送系统内的气压及物体输入输送管20的稳定性。
63.一实施例中,气体源10可以是罗式鼓风机(roots blower),但本案不以此为限。罗式鼓风机是透过两个叶形转子在汽缸内以相反方向旋转来压缩和输送气体的回转压缩机,其具有结构简单、制造方便、保养维护容易、风量稳定、压力变化小的特点,适用于低压力场合的气体输送和加压。
64.一实施例中,气体源10可以是配合流体控制阀来控制输入输送管20内的流量。在此实施例中,智能控制模块60耦接于流体控制阀来控制气体源10的输送量。
65.一实施例中,压力预警模块50的储存装置51可以是储存一操作查找表及预警数据。操作查找表包含各种适于智能物体输送系统输送的各种物体在不同特性、不同供料量所对应的气体的第一输送量及第二输送量。具体而言,物体的不同特性例如是物体的不同粒径或湿度,但本案不以此为限。操作查找表可以是由气体动力学运用于物体输送装置输送物体的历史数据所集结而成。而预警数据则包含第一预设压力值及安全压力值。
66.一实施例中,压力侦测装置40为一种压力传感器(pressure sensor),又称压力计。压力传感器是用于测量液体与气体的传感器。压力传感器工作时将压力转换为电信号输出,适用机械、钢铁、石化、电子厂房等环境。压力传感器除了可以直接测量压力,压力传感器同时也可用于间接测量其他量,如液体/气体的流量或速度。
67.一实施例中,压力侦测装置40可以是电容式压力计,电容式压力计主要是利用平行电容板的原理,当压力侦测装置40上的隔膜受压力而变形时,其隔膜与底板电极间的间隙改变而造成电容的变化,通过电容的变化便能够感测压力的大小。电容式压力计可实现精准、低功耗的高度和压力变化测量。电容式压力计除有低功耗的优点外,在解析度与抗温度变化的表现上均较压阻式压力计的表现佳。
68.一实施例中,压力侦测装置40可以是压阻式压力计,压阻式压力计主要是利用压阻材料的特性,当压阻材料受到应力变化而变形时,其电阻值也会因而改变,借此而能透过电阻的变化来量测气压。压阻式感测器具有高输出电压、高灵敏度以及制造成本低等优点。
69.一实施例中,压力侦测装置40可以是压电式压力计,压电式压力计主要是利用压电材料的特性,当压电材料受到应力的情况下,会产生电极化的现象而提供电荷,借此而能透过电荷的变化来量测气压。压电式压力计具有结构简单、体积小、重量轻、使用寿命长等优异的特点。
70.在气体动力学运用于物体输送工作的过程中,由于被输送的物体是相对于输送管20产生运动,因此,物体对于输送管20产生磨损是难以避免的。且随着物体特性的改变、输送管20的使用状态、操作手法的不同甚至是空气湿度的增加都有可能使输送管20内的物体无法顺畅地被输送。而输送管20内最容易累积物体的位置就是不平滑的表面位置或是弯折的位置。具体而言,输送管20内的不平滑表面可能是用以连接不同管段t的法兰f位置;而弯折位置除了弯曲型态的输送管20之外,用来将物体输送到不同方向的分歧阀m位置也具有
多个弯折点。当输送管20内发生物体输送不顺畅的状况时,将会在不平滑的表面或弯折位置产生积料而导致气压的上升。
71.因此,一实施例中,压力侦测装置40可以是至少设置于输送管20上不平滑或弯折的位置,借以能在最易发生积料之处感测到输送管20内气压的变化。在其他实施例中,压力侦测装置40设置的位置也可以设置于对应分歧阀m的位置或对应分歧阀m的法兰f的位置。但本案并不以此为限,压力侦测装置40也可以在输送管20上沿线完整布置以确保输送管20上的每个位置发生异常压力变化时即时处置。
72.一实施例中,智能物体输送系统透过压力侦测装置40除了可以即时感测到输送管20内发生积料的状况之外,也可以即时感测到异常的失压。由于智能物体输送系统整体运作时难免会产生震动,且物体入口至物体出口间的输送管20可能由多节管段t、法兰f及分歧阀m连接所组成,当输送管20因为材料疲劳、工程缺陷或是遭受撞击而导致异常松脱或是破裂时,输送管20内的气体将会在短时间内大量泄漏而失压。
73.为使前述失压状况也可以被监控,一实施例中,压力预警模块50的储存装置51内储存一第二预设压力值及一第三时间区段。压力预警模块50在当工作气压值于第三时间区段内下降至第二预设压力值时,判断输送管20异常失压,并且依据判断结果发送失压预警信号,则智能控制模块60接收失压预警信号并依据失压预警信号控制气体源10及入料装置30停止输入气体及物体,避免气体及物体的浪费。
74.在气体动力学运用于物体输送工作的过程中,由于气体、物体与输送管20间的随机性碰撞无法避免,因此,输送管20在输送物体的过程中也难以避免地会产生震动,而震动也是对于系统结构损害的因素之一。一实施例中,智能物体输送系统还包含震动感知器70。于此实施例中,震动感知器70设置于输送管20以感测输送管20的震动值,而压力预警模块50的储存装置51内则储存有震动安全值及震动警戒值,比较器52依据震动感知器70所感测的震动值比对震动安全值与震动警戒值,当震动感知器70所感测的震动值上升至震动警戒值时,发送震动警戒信号,而智能控制模块60即能依据震动警戒信号改变气体源10的输送量、气体压力或是改变入料装置30的供料量,以降低系统的震动值,避免智能物体输送系统因震动而对输送物体、系统管网的产生损害。一实施例中,震动感知器70可以是加速度感测计,用以量测瞬时震动量。
75.虽然本揭露已以一些实施例揭露如上,然其并非用以限定本揭露,任何所属技术领域中具有通常知识者,在不脱离本揭露的精神及范围内,当可作些许更动及润饰。因此本案的专利保护范围须视本说明书所附的权利要求书所界定的范围为准。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。