1.本发明涉及触觉提示装置。
背景技术:
2.以往以来,有在触摸面板上安装振动元件、且用双面胶带固定了触摸面板与框体的电子设备(例如参照专利文献1)。
3.现有技术文献
4.专利文献
5.专利文献1:国际公开第2014/207855号
技术实现要素:
6.发明要解决的技术问题
7.以往的电子设备由于利用双面胶带固定了安装有振动元件的触摸面板与框体,因此振动元件的振动容易传递到框体那样的基部。
8.因此,目的在于提供减少了振动向基部的传递的触觉提示装置。
9.用于解决技术问题的手段
10.本发明的实施方式的触觉提示装置具备:振动体;激振对象,与所述振动体弹性地连接,根据所述振动体的振动而被激振;以及基部,与所述激振对象弹性地连接,所述触觉提示装置对生物体提示基于所述激振对象的振动的触觉,所述基部与所述振动体分离地配置,包含所述基部以及所述激振对象在内的第一振动系统的共振频率是包含所述激振对象以及所述振动体在内的第二振动系统的共振频率的2/3倍以下。
11.发明效果
12.能够提供减少了振动向基部的传递的触觉提示装置。
附图说明
13.图1是表示实施方式的触觉提示装置100的立体图。
14.图2是图1的a-a向视剖面图。
15.图3是触觉提示装置100的分解图。
16.图4是表示基座110以及间隙传感器120的图。
17.图5是表示促动器130以及可动部140的图。
18.图6是表示促动器130的分解图。
19.图7是概略地表示触觉提示装置100的构成的图。
20.图8a是表示激振对象以及基部各自的振动频率与加速度的关系的图。
21.图8b是表示激振对象以及基部各自的振动频率与加速度的关系的图。
22.图9是表示使振动体的质量变化时的激振对象的振动频率与加速度的关系的图。
23.图10是表示使振动体的质量变化时的基部的振动频率与加速度的关系的图。
24.图11a是表示激振对象以及基部各自的加速度相对于振动频率的特性的图。
25.图11b是表示激振对象以及基部各自的加速度相对于振动频率的特性的图。
具体实施方式
26.以下,对应用了本发明的触觉提示装置的实施方式进行说明。
27.<实施方式>
28.图1是表示实施方式的触觉提示装置100的立体图。图2是图1的a-a向视剖面图。图3是触觉提示装置100的分解图。
29.以下,定义xyz坐标系进行说明。另外,以下,为了方便说明,将俯视称作xy面观察,将z轴负方向侧称作下侧或者下,将z轴正方向侧称作上侧或者上,但并非表示普遍的上下关系。
30.触觉提示装置100包含基座110、间隙传感器120、促动器130、可动部140、静电传感器150、操作面板160、边框170以及螺钉175。
31.另外,以下,在图1至图3的基础上,还使用图4至图6进行说明。图4是表示基座110以及间隙传感器120的图。图5是表示促动器130以及可动部140的图。图6是表示促动器130的分解图。
32.触觉提示装置100还包括作为弹性体的橡胶部件180s、180l、180u(参照图4以及图5)。
33.这里,基座110以及边框170是作为触觉提示装置100的基础而被安装于外部的物体的基部的一个例子。促动器130的磁体134以及保持件135(参照图6)是振动体的一个例子。促动器130的磁体134以及保持件135以外的部分(顶部磁轭131、底部磁轭132、驱动线圈133、弹簧136、螺钉137以及垫圈137a(参照图6))、可动部140、静电传感器150以及操作面板160是激振对象的一个例子。
34.将包含基部与激振对象的振动系统称作第一振动系统。由基部的一个例子(基座110以及边框170)、激振对象的一个例子(促动器130的顶部磁轭131、底部磁轭132、驱动线圈133、弹簧136、螺钉137、垫圈137a、可动部140、静电传感器150以及操作面板160)、及将基部与激振对象弹性地连接的弹性体的一个例子(橡胶部件180s、180l、180u)构成的振动系统是第一振动系统的一个例子。
35.另外,将包含振动体与激振对象的振动系统称作第二振动系统。由振动体的一个例子(促动器130的磁体134以及保持件135)与激振对象的一个例子(促动器130的顶部磁轭131、底部磁轭132、驱动线圈133、弹簧136、螺钉137、垫圈137a、可动部140、静电传感器150以及操作面板160)构成的振动系统是第二振动系统的一个例子。换言之,第二振动系统的一个例子是促动器130、可动部140、静电传感器150以及操作面板160。
36.基座110作为一个例子为树脂制。基座110是俯视时矩形状的部件,形成从上侧朝向下侧凹陷的收纳部110a。另外,基座110具有底板111、侧壁112、引导件113、台阶部114、突出部115。
37.收纳部110a是被基座110的底板111以及侧壁112包围的大致长方体状的空间。在收纳部110a中收纳间隙传感器120、促动器130、可动部140的下侧的一部分。它们中的间隙传感器120设于底板111的上表面。
38.底板111是俯视时矩形状的板状的部分,具有设于中央的开口部111a、设于x方向的两端部的开口部111b、设于y方向的两端部的开口部111c。在开口部111a中插入促动器130的下端部。促动器130与底板111不接触,在其间形成间隙。
39.在开口部111b中插入可动部140的引导件145的下端。在开口部111b中,引导件145不与底板111接触,在其间形成间隙。
40.侧壁112是从底板111的四边向上方向立起的、俯视时呈矩形环状的壁部。在
±
x方向侧沿y方向延伸的侧壁112的内侧设有引导件113。另外,在侧壁112的内侧与底板111的边界部分设有台阶部114,该台阶部114的上表面位于比底板111靠上侧,且上表面位于比侧壁112的上表面112a靠下侧。另外,在侧壁112的上表面112a设有从上表面112a向上侧突出的突出部115。
41.在组装了触觉提示装置100的状态下,引导件113插入到可动部140的引导件145的槽145a,引导件145的下端被插入开口部111b。引导件113为了进行基座110与可动部140的对位而设置。在组装了触觉提示装置100的状态下,基座110的引导件113与可动部140的引导件145不抵接,在其间形成间隙。
42.台阶部114在收纳部110a内的底板111与侧壁112的边界部分设为俯视时呈矩形环状。在台阶部114的上表面设置橡胶部件180l(参照图4以及图5)。橡胶部件180l是橡胶(rubber,gom)制的较小的长方体状的部件,并且是具有弹性的橡胶的块。另外,橡胶部件180l并不局限于由橡胶的块构成,例如也可以是包含弹簧的构成。但是,由于不优选从橡胶部件180l产生声音,因此与包含金属制的弹簧等的构成相比,优选的是由橡胶构成。
43.在图4以及图5中,作为一个例子,示出8个橡胶部件180l。橡胶部件180l在矩形环状的台阶部114的相当于各边的区间各设有两个。另外,在图3中,省略橡胶部件180l。
44.橡胶部件180l在组装了触觉提示装置100的状态下以弹性变形的状态设置于台阶部114的上表面与可动部140的下表面之间,将可动部140弹性地支承于基座110。
45.另外,在俯视时与橡胶部件180l相同位置处的上方,设有橡胶部件180u(参照图4以及图5)。橡胶部件180u是橡胶(rubber,gom)制的较小的长方体状的部件,且是具有弹性的橡胶的块。橡胶部件180u并不局限于由橡胶的块构成,例如也可以是包含弹簧的构成。但是,由于不优选从橡胶部件180u产生声音,因此与包含金属制的弹簧等的构成相比,优选的是由橡胶构成。图4中示出组装了触觉提示装置100的状态下的8个橡胶部件180u的位置。
46.橡胶部件180u在组装了触觉提示装置100的状态下以弹性变形的状态设置于可动部140的上表面与边框170的偏移面172之间,弹性地支承在边框170与可动部140之间。在图4中,由于省略边框170与可动部140,将橡胶部件180u以悬空的方式表示。
47.突出部115是从侧壁112的上表面112a向上侧突出的壁状的部分,在俯视时在上表面112a之上设为矩形环状。突出部115在俯视时宽度比侧壁112窄,设置在上表面112a的内侧(收纳部110a侧)。
48.在
±
x方向侧沿y方向延伸的突出部115的内侧的表面设有橡胶部件180s(参照图2、图4以及图5)。橡胶部件180s是橡胶(gom)制的较小的长方体状的部件,并且是具有弹性的橡胶的块。橡胶部件180s并不局限于由橡胶的块构成,例如也可以是包含弹簧的构成。但是,由于不优选从橡胶部件180s产生声音,因此与设为包含金属制的弹簧等的构成相比,优选的是由橡胶构成。在图4以及图5中,作为一个例子,在
±
x方向侧沿y方向延伸的突出部
115的内侧的表面各设有四个橡胶部件180s。另外,在图3中,省略橡胶部件180s。
49.橡胶部件180s在组装了触觉提示装置100的状态下以弹性变形的状态设置于在
±
x方向侧沿y方向延伸的突出部115的内侧的表面和在可动部140的
±
x方向侧沿y方向延伸的侧面之间,将可动部140弹性地支承于基座110。橡胶部件180s设于基座110与可动部140的x方向上的间隙,从而将可动部140支承为能够相对于基座110在
±
x方向上振动。
50.间隙传感器120是检测操作面板160向-z方向的按压的检测部的一个例子。间隙传感器120是检测与可动部140的下表面在z方向的间隙的传感器。间隙传感器120作为一个例子,是内置光源与受光元件的光学类型的传感器,接受照射到可动部140的下表面的光的反射光,基于反射光在受光元件成像的位置的变化,检测可动部140向-z方向的位移。在可动部140向-z方向位移时,静电传感器150以及操作面板160也向-z方向位移,因此通过检测可动部140的下表面在-z方向的位移,能够检测静电传感器150以及操作面板160的-z方向的按压。若操作面板160被向-z方向按压,则可动部140向-z方向位移几十μm。
51.检测操作面板160向-z方向的按压的检测部不限定于间隙传感器120。检测部也可以是静电传感器等非接触的位置检测传感器。检测部也可以是检测施加于操作面板160的上表面的压力的压敏传感器。
52.促动器130通过螺钉137固定在可动部140的下表面侧。在可动部140的下表面设有向上侧凹陷的凹部,促动器130安装于凹部。另外,可动部140也可以不具备凹部,也可以在下表面安装有促动器130。
53.如图6所示,促动器130具有顶部磁轭131、底部磁轭132、驱动线圈133、磁体134、保持件135、弹簧(spring)136、螺钉137以及垫圈137a。在图5中,顶部磁轭131位于可动部140的下表面的凹部的内部并被隐藏。
54.顶部磁轭131是磁性体,并且是安装于可动部140的下表面的凹部的板状的磁轭。在顶部磁轭131上,在x方向的两端形成有使螺钉137沿z方向插通的贯通孔131a。
55.底部磁轭132是磁性体,并且是在从xz面观察时为
“コ”
字型的磁轭。底部磁轭132优选的是与顶部磁轭131相同的磁性体。在底部磁轭132的底板132a的部分以沿x方向排列的状态固定两个驱动线圈133。在底部磁轭132的侧壁132b的内侧的面上,以上侧的x方向的厚度变薄的方式设有台阶部132b1。底部磁轭132的侧壁132b的上端被固定于顶部磁轭131的两端侧。由此,顶部磁轭131与底部磁轭132构成从xz面观察时闭合成环状的磁路。
56.另外,促动器130的构成要素之中位于最下方的底部磁轭132的底板132a在组装了触觉提示装置100的状态下插入于基座110的底板111的开口部111a的内部。在该状态下,底部磁轭132不与基座110接触。因此,促动器130与基座110分离地配置,换言之,基座110与促动器130分离地配置。这是为了形成在使促动器130振动时振动难以传递到基座110的构成。
57.驱动线圈133是在xy平面内卷绕的线圈,通过粘合或者螺钉固定等固定于底部磁轭132的底板132a的上表面。若驱动线圈133中流过俯视时顺时针的电流,则产生向下贯通驱动线圈133的中心的磁通。另外,若在驱动线圈133中流过俯视时逆时针的电流,则产生向上贯通驱动线圈133的中心的磁通。
58.磁体134是多极磁化型的永磁体,具有从-x方向侧向 x方向侧排列的四个极(n极134a、s极134b、n极134c、s极134d)。n极134a与s极134b的边界相比于-x方向侧的驱动线圈133的x方向的中心,向 x方向侧偏移。另外,n极134c与s极134d的边界相比于 x方向侧的驱
动线圈133的x方向的中心,向-x方向侧偏移。
59.保持件135由非磁性体构成,是保持磁体134的部件。保持件135在保持磁体134的状态下经由弹簧136通过螺钉固定等固定于底部磁轭132的侧壁132b的台阶部132b1。
60.弹簧136将保持件135弹性地保持于底部磁轭132,能够沿x方向伸缩。
61.螺钉137为了将顶部磁轭131固定于可动部140的下表面的凹部而设置,经由垫圈137a螺钉固定于可动部140的下表面的凹部。
62.在这种促动器130中,若在驱动线圈133中流过俯视时顺时针的电流,则产生向下贯通驱动线圈133的中心的磁通。因此,驱动线圈133的上端侧成为s极,在n极134a以及n极134c之间产生磁吸引力,磁体134被作用 x方向的力。
63.另外,若在驱动线圈133中流过俯视时逆时针的电流,则产生向上贯通驱动线圈133的中心的磁通。因此,驱动线圈133的上端侧成为n极,与s极134b以及s极134d之间产生磁吸引力,磁体134被作用-x方向的力。
64.只要在驱动线圈133中交替地流过俯视时顺时针的电流与逆时针的电流,就能够使 x方向的力与-x方向的力交替地作用于磁体134。另外,磁体134与保持件135成为一体,经由弹簧136安装于底部磁轭132,弹簧136能够沿x方向伸缩。
65.因此,只要在驱动线圈133中交替地流过俯视时顺时针的电流与逆时针的电流,就能够使磁体134以及保持件135相对于顶部磁轭131以及底部磁轭132沿x方向振动。
66.促动器130的顶部磁轭131固定于可动部140的下表面侧,对可动部140激振。由于在可动部140的上侧安装有静电传感器150以及操作面板160,因此促动器130对由可动部140、静电传感器150以及操作面板160构成的激振对象激振。
67.可动部140作为一个例子为树脂制,并且是俯视时为矩形状且薄板状的部件。可动部140在下表面安装促动器130,在上表面侧依次重叠设置有静电传感器150以及操作面板160。
68.另外,在可动部140的x方向的两侧面与基座110的
±
x方向侧的突出部115的内侧的表面之间,以压缩的状态设置有橡胶部件180s。因此,可动部140的俯视时沿着四边的侧面只有
±
x方向侧的侧面仅经由橡胶部件180s与基座110相接。
69.另外,在可动部140的下表面的沿着四边的端部与基座110的台阶部114之间,设有橡胶部件180l。因此,可动部140的下表面仅经由橡胶部件180l与基座110相接。
70.另外,在可动部140的上表面的沿着四边的端部与边框170的偏移(offset)面172之间设有橡胶部件180u。因此,可动部140的上表面仅经由橡胶部件180u与边框170相接。
71.另外,在可动部140的引导件145的槽145a中,为了与基座110对位而插入引导件113,引导件145的下端被插入于基座110的开口部110b,但引导件145以及引导件113不接触。
72.因此,可动部140仅经由橡胶部件180s、180l、180u而与基座110以及边框170接触。即,基座110与可动部140弹性地连接。
73.静电传感器150固定于可动部140的上表面。静电传感器150的上表面以及侧面被操作面板160覆盖,操作面板160通过螺钉固定等固定于可动部140,由此静电传感器150固定于可动部140的上表面。
74.静电传感器150作为一个例子是触摸板,基于静电电容的变化来检测有无操作体
对操作面板160的操作和进行操作的位置。操作体例如是生物体的手指或者手、触控笔(stylus pen)那样的道具。
75.关于对操作面板160的操作,有在通过操作体对操作面板160直接进行的情况和在操作面板160之上进一步设置罩等的情况下经由罩等间接地进行的情况。
76.操作面板160是俯视时为矩形状的树脂制的面板,设为覆盖静电传感器150的上表面与侧面。静电传感器150经由操作面板160检测操作。因此,操作面板160为非金属制,作为一个例子为树脂制。
77.边框170是俯视时为矩形环状的框状的部件,如图2所示,剖面为l字型。边框170具有下表面171与偏移面172。偏移面172向比下表面171靠内侧和上侧偏移。下表面171以及偏移面172都是从-z方向侧观察时为矩形环状的面。
78.边框170以与操作面板160分离地包围操作面板160的方式,以偏移面172经由未图示的橡胶部件抵接于基座110的侧壁112的上表面112a的状态安装。边框170与操作面板160分离,因此不与操作面板160接触。另外,边框170也不与可动部140接触。
79.边框170在偏移面172抵接于基座110的侧壁112的上表面112a的状态下,利用螺钉175固定于基座110。在图3中,作为一个例子,示出将基座110与边框170的四角固定的四个螺钉175,但也可以通过更多的螺钉175固定,也可以通过更少的螺钉175固定。
80.在这种触觉提示装置100中,作为条件(1),使第一振动系统的共振频率为第二振动系统的共振频率的2/3倍以下。这是为了在使促动器130振动时对激振对象充分地激振,并且减少传递到基座110的振动。
81.另外,为了增大这种效果,作为条件(2),也可以使振动体的质量为激振对象的质量以下。
82.另外,作为条件(3),也可以使第一振动系统的共振频率为50hz以上。作为一个例子,考虑将触觉提示装置100搭载于车辆,可知在车辆的行驶中产生的道路噪声(振动)是以50hz以下的频率为主体。因此,即使通过将基座110安装于车辆的室内的中控台等而将触觉提示装置100搭载于车辆,也为了抑制道路噪声传递到第一振动系统的激振对象的振动而使第一振动系统的共振频率为50hz以上。换言之,这是为了使第一振动系统的振动不受以道路噪声作为起因的车辆振动的影响。
83.另外,作为条件(4),也可以将第二振动系统的共振频率设定为80hz以上、320hz以下的范围。这是因为,人的感觉器官最容易感觉到从80hz至320hz的频带的振动。
84.另外,作为条件(5),也可以设为如下的振动系统:将激振对象向x方向激振并使第一振动系统与第二振动系统沿x方向振动。x方向是规定的方向的一个例子。
85.另外,作为条件(6),也可以使第一振动系统的共振频率为第二振动系统的共振频率的1/3倍以下。这是相比于条件(1)将第一振动系统的共振频率设定在更优选的范围的条件,并且是为了在使促动器130振动时更有效地对激振对象激振并且更有效地减少传递到基座110的振动而设置的条件。
86.另外,作为条件(7),也可以是,使用第一振动系统中的弹簧常数k、粘性损失c、激振对象的质量m由下式(1)表示的q值(quality factor)为1以上10以下。
87.q=(mk)
1/2
/c
ꢀꢀꢀ
(1)
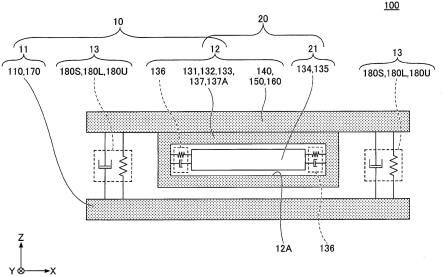
88.图7是概略地表示触觉提示装置100的构成的图。第一振动系统10是包含基部11、
激振对象12以及弹性体13的振动系统。激振对象12经由弹性体13连接于基部11。基部11作为一个例子,包含基座110以及边框170。这里,将基部11表示为1张板状部件。激振对象12作为一个例子,包含顶部磁轭131、底部磁轭132、驱动线圈133、弹簧136、螺钉137、垫圈137a、可动部140、静电传感器150以及操作面板160。这里,将激振对象12中的顶部磁轭131、底部磁轭132、驱动线圈133、螺钉137、垫圈137a统一表示为在从xz面观察时在中央具有开口部12a的框状的部件。将激振对象12中的弹簧136表示为线圈以及阻尼器的对(pair)。另外,将激振对象12中的可动部140、静电传感器150以及操作面板160表示为板状的部件。在包含可动部140、静电传感器150以及操作面板160在内的板状的部件之下固定有包含顶部磁轭131、底部磁轭132、驱动线圈133、螺钉137、垫圈137a在内的框状的部件。弹性体13将基部11与激振对象12弹性地连接,作为一个例子,包含橡胶部件180s、180l、180u。这里,将橡胶部件180s、180l、180u表示为线圈以及阻尼器的对。
89.另外,第二振动系统20是包含振动体21与激振对象12的振动系统。振动体21作为一个例子,包含磁体134、保持件135。这里,将振动体21表示为一个部件,振动体21被表示为在激振对象12的开口部12a之中由弹簧136保持。激振对象12作为一个例子,包含顶部磁轭131、底部磁轭132、驱动线圈133、弹簧136、螺钉137、垫圈137a、可动部140、静电传感器150以及操作面板160,因此第二振动系统20由促动器130(参照图6等),可动部140、静电传感器150以及操作面板160构成。
90.若在驱动线圈133中流过俯视时顺时针的电流,则如上述那样,磁体134被作用 x方向的力,若在驱动线圈133中流过俯视时逆时针的电流,则如上述那样,磁体134被作用-x方向的力。通过在驱动线圈133中交替流过俯视时顺时针的电流与逆时针的电流,能够对磁体134交替地作用 x方向与-x方向的力,将激振对象12向
±
x方向激振。
91.图8a以及图8b是表示激振对象以及基部各自的振动频率与加速度的关系的图。图8a中示出与激振对象的振动频率fa相对的激振对象的加速度,图8b中示出与基部的振动频率fb相对的基部的加速度。激振对象的振动频率fa是激振对象在x方向上振动时的频率。另外,基部的振动频率fb是基部在x方向上振动时的频率。
92.图8a、图8b所示的特性是在模拟中将第一振动系统的共振频率fc1设定为50hz、75hz、100hz、150hz这4种共振频率且将第二振动系统的共振频率fc2设定为150hz而得的特性。即,在第一振动系统的共振频率fc1为50hz、75hz、100hz、150hz时,分别成为第二振动系统的共振频率fc2的1/3倍、1/2倍、2/3倍、1倍。图8a、图8b中示出将振动体的质量设为0.06kg、将激振对象的质量设为0.4kg、将基部的质量设为1kg的情况下的模拟结果。
93.将第一振动系统的共振频率fc1设定为规定的频率例如50hz、75hz、100hz、150hz这4种频率主要通过设定将第一振动系统所含的激振对象与基部弹性地连接的弹性体(例如橡胶部件180s、180l、180u)的弹簧常数来实现。另外,由于第一振动系统的振动方向为x轴方向,因此第一振动系统的共振频率fc1主要由橡胶部件180s、180l、180u中的容易在x方向上弹性变形的橡胶部件180s的弹簧常数决定。这是因为,橡胶部件180l、180u在x方向上产生剪切方向的变形,x方向的弹簧常数为橡胶部件180s的x方向的弹簧常数的1/10倍左右。另外,严格来说,第一振动系统所含的激振对象以及基部(例如可动部140、静电传感器150以及操作面板160)也具有弹性,但与橡胶部件180s、180l、180u的弹性相比,为能够忽略的程度。
94.另外,将第二振动系统的共振频率fc2设定为规定的频率例如150hz主要通过促动器130的振动特性与可动部140、静电传感器150以及操作面板160的尺寸以及杨氏模量等设定来实现。
95.如图8a所示,激振对象的加速度表现出如下特性:在振动频率fa为40hz以上65hz以下时取极大值,在50hz以上160hz以下时取极小值,在200hz以上500hz以下时以约30db的值取第2个极大值(峰值),而且,在高频率侧平缓地降低。激振对象的加速度与峰值相比在振动频率fa的高频率侧,相对于峰值的减少被抑制为6db~8db左右,并且振动频率fa的变化引起的激振对象的加速度的变化相对较小,因此能够充分地对激振对象激振,并且容易设计成以希望的强度激振。即,振动频率fa从峰值附近到高频率的区域是适合激振对象的激振的频带。另外,随着将共振频率fc1增大为50hz、75hz、100hz、150hz,取极大值、极小值以及峰值的振动频率fa显示出向高频率侧偏移的趋势。
96.人的感觉器官容易感知从80hz到500hz的频带的振动,更容易感知从80hz到320hz的频带的振动。共振频率fc1为150hz的振动模式由于极小值产生在约为150hz,难以在人的感觉器官容易感知的频带对激振对象激振,因此并不优选。另一方面,随着共振频率fc1按照100hz、75hz、50hz的顺序变小,振动频率fa的极小值朝向不到80hz而减少,因此变得容易在人容易感知的频带对激振对象激振,在这一点更加优选。另外,随着共振频率fc1变小,振动频率fa的峰值在500hz以下的范围内减少,因此能够遍及更宽的频带地灵活运用从适合于激振对象的激振的峰值附近起到高频的区域。换言之,从有效地将激振对象激振的观点出发,共振频率fc1优选的是100hz以下,更优选的是75hz以下,进一步优选的是50hz以下。
97.另外,如图8b所示,基部的加速度表现出如下特性:在基部的振动频率fb为40hz以上65hz以下时取极大值,在90hz以上200hz以下时取极小值,在200hz以上500hz以下时以约10db的值取第2个极大值,进而在高频率侧减少。在振动频率fb为80hz以上500hz以下时,共振频率fc1为50hz、75hz、100hz时的基部的加速度为10db以下。
98.可知在人的感觉器官容易感知的80hz至500hz的频带中,基部的振动强度与激振对象的振动强度相比衰减20db左右。即,可知在第二振动系统的共振频率fc2为150hz时,在第一振动系统的共振频率fc1为50hz、75hz、100hz的情况下,基部的振动被衰减。
99.另外,如图8b所示,可知在人的感觉器官容易感知的80hz到500hz的频带中,随着第一振动系统的共振频率fc1变小,基部的振动强度减少。换言之,出于减少向基部的振动传递的观点,优选的是共振频率fc1为100hz以下,更优选的是75hz以下,进一步优选的是50hz以下。
100.由以上可知,如作为条件(1)所示,如果第一振动系统的共振频率fc1为第二振动系统的共振频率fc2的2/3倍以下,即,使第一振动系统的共振频率fc1为100hz以下,则在驱动促动器130而使振动体振动时,能够将激振对象充分地激振,并且减少传递到基部的振动。
101.另外,可知如果第一振动系统的共振频率fc1为第二振动系统的共振频率fc2的1/2倍以下,即,使第一振动系统的共振频率fc1为75hz以下,则能够更有效地对激振对象激振,并且更加减少传递到基部的振动。而且,可知,如作为条件(6)所示那样,如果第一振动系统的共振频率fc1为第二振动系统的共振频率fc2的1/3倍以下,即第一振动系统的共振频率fc1为50hz以下,则能够更进一步有效地对激振对象激振,并且更进一步减少传递到基
部的振动。
102.另外,人的感觉器官能够感知80hz至500hz的频带的振动,最容易感知80hz至320hz的频带的振动。因此,可以将第二振动系统的共振频率fc2设定在80hz以上500hz以下的范围,但如作为条件(4)所示那样,将第二振动系统的共振频率fc2设定在80hz以上320hz以下的范围更好。
103.另外,触觉提示装置100具有激振对象被沿x方向激振、第一振动系统与第二振动系统沿x方向振动的振动系统。这正如作为条件(5)所示那样。由于促动器130具有如图6那样配置的驱动线圈133与磁体134,因此能够容易地实现激振对象沿x方向被激振、使第一振动系统与第二振动系统沿x方向振动的构成。
104.图9是表示使振动体的质量变化时的激振对象的振动频率fa与加速度的关系的图。图10是表示使振动体的质量变化时的基部的振动频率fb与加速度的关系的图。图9以及图10所示的特性是通过在模拟中将第一振动系统的共振频率fc1设定为50hz、75hz、100hz、150hz这4种、并将第二振动系统的共振频率fc2设定为150hz而得的特性。
105.图9以及图10中分别示出使振动体的质量阶段性地增大为0.01kg、0.05kg、0.2kg、0.8kg、4kg而得的五个模拟结果。另外,关于基部的质量,设想安装于车辆而设定为10kg,将激振对象的质量设定为0.2kg。
106.如图9所示,使振动体的质量阶段性地增大到0.01kg、0.05kg、0.2kg、0.8kg、4kg时,相对于第一振动系统的共振频率fc1的变化,激振对象的加速度变化到0.2kg为止,在0.8kg与4kg的情况下几乎看不到变化。这表示,若振动体的质量超过0.2kg,即若振动体的质量超过激振对象的质量,则难以受到作为决定第一振动系统的共振频率fc1的主要因素的、将基部与激振对象弹性地连接的弹性体(橡胶部件180s、180l、180u)的弹簧常数的影响。
107.另外,振动体的质量越增大,激振对象的加速度越是与振动频率fa无关地整体减少。认为这是因为,振动体的质量相对于激振对象的质量越大,累积于振动体的能量相对于累积于激振对象的能量也越大。
108.由此,出于有效地将激振对象激振的观点,振动体的质量相对于激振对象的质量越小越好,特别优选的是振动体的质量为激振对象的质量以下。
109.如图10所示,可知在使振动体的质量阶段性地增大为0.01kg、0.05kg、0.2kg、0.8kg、4kg时,在所有的质量中,相对于第一振动系统的共振频率fc1的变化,基部的加速度产生变化。另外,可知在80hz至500hz的频带中,相对于图9所示的激振对象的加速度,图10所示的基部的加速度充分地减少。因此,可知在基座110的振动频率fb与加速度的关系中,可以将振动体的质量设定为0.01kg、0.05kg、0.2kg、0.8kg、4kg中的任一个。
110.因而,根据图9以及图10可知,如作为条件(2)所示那样,振动体的质量优选的是激振对象的质量以下。
111.图11a以及图11b是表示激振对象以及基部各自的加速度相对于振动频率的特性的图。图11a以及图11b中示出使第一振动系统的q值阶段性地变化为15、10、5、2、1时所得的多个特性。另外,图11a以及图11b所示的特性是通过在模拟中将第一振动系统的共振频率fc1设定为50hz、将第二振动系统的共振频率fc2设定为150hz而得的特性。
112.第一振动系统的q值使用第一振动系统中的弹簧常数k、粘性损失c、激振对象的质
量m而由下式(1)表示。
113.q=(mk)
1/2
/c
ꢀꢀꢀ
(1)
114.图11a中示出激振对象的加速度相对于振动频率fa的特性。在图11a中,可知若使q值阶段性地变化为15、10、5、2、1,则有q值较大的一方可获得较大的加速度的趋势。另外,可知在q值为15与10时,几乎没有差别。这些趋势在人的感觉器官容易感知的80hz至500hz的范围内特别显著。由此,可知根据激振对象的加速度相对于振动频率fa的特性,q值越大越好,但即使使q值大于10,效果也较小,即使q值为1也能够充分地激振。
115.图11b中示出基部的加速度相对于振动频率fb的特性。在图11b中,可知若使q值阶段性地变化为15、10、5、2、1,则有q值较大时基部的加速度减少的趋势。该趋势在人的感觉器官容易感知的80hz至500hz的范围内特别显著。但是,可知在容易受到道路噪声的影响的50hz以下的频带中,在q值为15的情况下,产生成为较大的加速度的极大值。另外,可知在80hz至500hz的范围内,相对于图11a所示的激振对象的加速度,图11b所示的基部的加速度得以充分地减少。由此,根据基部的加速度相对于振动频率fb的特性,可知q值在10以下的范围内越大越好,但即使q值为1也能够减少基部的振动。
116.以上,根据图11a、图11b的结果可知,如作为条件(7)所示那样,第一振动系统的q值优选的是1以上、10以下。
117.如以上那样,通过使第一振动系统的共振频率fc1为第二振动系统的共振频率fc2的2/3倍以下,能够实现可充分地对激振对象进行激振并且振动难以传递到基部的构成。
118.因而,能够提供可充分地对激振对象进行激振并且减少了振动向基部的传递的触觉提示装置100。
119.另外,以上说明了使用静电传感器150的方式,但也可以取代静电传感器150而使用能够透过光的触摸面板,并且在触摸面板上重叠设置显示面板,并对显示于显示面板的gui(graphical user interface)进行按压操作。
120.另外,在图8a至图11b中,说明了将第二振动系统的共振频率fc2设定为150hz的情况下的激振对象以及/或者基部中的振动频率fb与加速度,但在共振频率fc2为150hz以外的情况下也相同。
121.另外,以上,说明了促动器130的振动方向为x方向的方式,但促动器130的振动方向并不限定于x方向。例如也可以是z方向,也可以是其他方向。
122.以上,说明了本发明的例示的实施方式的触觉提示装置,但本发明并不限定于具体公开的实施方式,可以不脱离权利要求书的范围地进行各种变形、变更。
123.另外,本国际申请主张基于2019年12月27日申请的日本专利申请2019-239833号的优先权,其全部内容通过这里的参照引用到本国际申请中。
124.附图标记说明
125.100 触觉提示装置
126.110 基座
127.130 促动器
128.131 顶部磁轭
129.132 底部磁轭
130.133 驱动线圈
131.134 磁体
132.135 保持件
133.136 弹簧
134.137 螺钉
135.137a 垫圈
136.140 可动部
137.150 静电传感器
138.180s、180l、180u 橡胶部件
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。