用于跟踪体育用球的系统和方法
1.优先权主张
2.本技术主张2020年1月21日提交的第62/963,868号美国临时专利申请的优先权。上述申请的说明书以引用的方式并入本文中。
技术领域
背景技术:
3.在当今技术不断发展的世界,使用体育用球的运动选手越来越多地使用提供有关体育用球的轨迹以及与体育用球的发射相关的发射运动(例如,球杆或球棒的挥动、踢动或投掷运动等)的信息的测量设备。
4.为了高效地进步,必须综合这些测量值和各种参数,以创建能够最有效地改进表现的系统。
5.例如,在高尔夫运动中,挥杆中的各种因素以及设备选择之间的相互作用太复杂而无法由传统教练等任何人类进行监测和分析。当考虑到设备与对任何调整的生物机械反应之间的相互作用时,要确定产生改进的练习路线会变得更加复杂并且远远超出了人类的能力,更不用说对任何给定动作路线的潜在收益进行量化。
技术实现要素:
6.本发明的实施例涉及一种用于确定高尔夫击球轨迹中的潜在改变的系统,所述系统包括:传感器阵列,其感测与高尔夫球手的挥杆相关的挥杆数据以及与高尔夫球手击出的多个击球中的每一者的轨迹相关的轨迹数据;以及计算布置,其包含数据存储库和处理器,所述处理器被配置成:将所述挥杆数据和所述轨迹数据存储在所述数据存储库中;标识由所述高尔夫球手击出的表示未击中的击球;以及基于所述高尔夫球手击出的未被标识为未击中的所有击球的所述挥杆数据和所述轨迹数据来确定输出数据,所述输出数据指示所述高尔夫球手可实现的最优击球。
7.本发明的实施例提供一种系统,其用于跟踪体育用球并分析球手表现以产生高效改进的计划,从而消除或减少对专业体育运动教练或指导者的需求。本发明的实施例包含一种系统,其包含测量球轨迹以及关于将球发射到所实现的体育用球轨迹中的挥杆、踢动、投掷等数据的一个或多个传感器。所述系统可随时间推移操作以习得所测量参数对发射运动(例如,挥杆、踢动、投掷等)的影响,以计算这些参数的改变对所得体育用球轨迹的影响。基于这种学习,所述系统标识要改变的发射运动参数和改进运动选手表现的所要改变程度。
8.通过跟踪所发射的体育用球,本发明的实施例以一个或多个表现得分来对运动选手的表现进行基准测试,所述一个或多个表现得分准许系统计算不同的可能发射运动和/或设备改变对运动选手的表现的影响,从而能够为运动选手制定标识对表现具有最大积极影响的改变的计划。由于物理学以及多个参数之间的相互作用非常复杂,因此教练或指导
者无法进行这些计算。对于人类教练来说,需要更有限的专注,因为任何人几乎都无法计算可能被任何改变影响的多个额外参数上的一个参数改变的复杂结果。
9.为了解所述系统关于发射运动的改变如何影响体育用球轨迹的学习本质,考虑以下高尔夫示例。
10.当惯用右手的高尔夫球手的杆头路径(club path)被检测到位于球杆面(club face)(例如,所谓的“面对路径的开放面”)的面角(face angle)左侧时,球通常会围绕向右倾斜的自旋轴自旋(例如,可由球跟踪系统确认和测量),这通常会产生向右弯曲的球轨迹。
11.如果检测到的杆头速度(club speed)增加,而其它一切保持不变,则检测到的球速和自旋速率通常将增加。这通常还将产生更高和更长的检测到的球轨迹。
12.如果检测到的球在球杆面上的撞击点与投射到球杆面上的球杆头重心间隔开,则检测到的球速很可能会下降,并且检测到的轨迹曲率也可能会受到影响。
13.如果检测到的球杆头击球角(attack angle)增加,则发射后检测到的球轨迹通常会更陡(接近竖直),从而产生更高的检测到的球轨迹。
14.然而,由于高尔夫挥杆的复杂生物力学,这些变量中任何一个的改变都很可能会引起其它变量的改变,所述改变可显著因人而异。本公开可根据多个高尔夫球手中的每一者的经验模型建构,使得可有把握地预测针对一个变量的改变的影响。例如,与来自高尔夫球手本人和/或来自许多其他高尔夫球手的许多先前击球的(例如,生物力学、设备相关等)各种参数相对应的数据可用于训练神经网络,以开发模型以用于预测高尔夫球手表现的任何单一改变的结果。其它体育活动的发射运动的复杂性呈现了类似的问题,并且由本发明的实施例以类似方式解决。
附图说明
15.图1示出根据实施例的可供高尔夫球手测量高尔夫球手表现、确定高尔夫球手特性以及确定改进高尔夫球手表现的一个或多个有效的方式的系统。
16.图2示出根据实施例的描述用于确定高尔夫球手特性以及确定用于改进高尔夫球手表现的有效的方式的方法的流程图。
17.图3示出确定击中高尔夫球的轨迹的事件的逻辑序列。
18.图4示出由本发明的实施例支持的高尔夫球手改进循环。
19.图5示出高尔夫球手基准测试和高尔夫特性的显示的示例。
20.图6示出以优先排序的次序显示能够直接获得重点练习计划的高尔夫球手改进主题的示例。
21.图7示出本发明的实施例的实施方案的示例。
22.图8示出两个基准测试得分的使用,用以将具有类似问题的球手分类到群组中。
23.图9示出通过高尔夫击球跟踪系统测量的男性高尔夫球手的平均球杆递送以及球发射和落地条件。
具体实施方式
24.可参考以下描述和相关附图进一步理解示例性实施例,其中为相同的元件提供相同的附图标号。
25.在下文中,击打高尔夫球的高尔夫球手被用作本发明的实施例的示例。然而,所属领域的技术人员应理解,相同原理可应用于各种其它体育运动,其中运动选手通过例如直接击球(例如,排球或足球)、用球杆或球棒击球(例如,板球、棒球和高尔夫)或投掷体育用球以意图达到体育用球的特定轨迹或最终位置来发射体育用球等体育运动对象。
26.本技术中使用的术语将定义坐标系,以描述球杆与球之间在撞击时的动态相互作用。然而,所属领域的技术人员将理解,在不脱离实施例的范围的情况下,可采用任何其它坐标系或系统以用于分析高尔夫球与高尔夫球杆之间(或任何体育用球撞击器具与体育用球之间)的撞击的三维特性,只要所导出的数据使得人们能够理解所得击球的质量并且对其改进方法进行预测即可。在分析高尔夫球杆与高尔夫球的撞击特性时,例如杆头路径、击球角、动态倾角(dynamic loft)、面角和动态底角(dynamic lie)等变量是有用的,并且可关于原点为球在撞击之前的位置的坐标系来理解。例如,坐标系的第一轴线可以是从球到既定目标的水平线(例如,目标方向),而坐标系的第二轴线是穿过球的竖直线,并且第三轴线是垂直于目标方向的水平线,从而组成笛卡尔坐标系(cartesian coordinate system)。
27.所属领域的技术人员将理解,考虑到高尔夫球杆在撞击点处的三维方向,高尔夫球杆的跟部(heel)处的杆头路径不与高尔夫球杆的趾部(toe)处的杆头路径相同,并且因此球与球杆面之间的撞击的实际位置的路径可不同于这些路径中的任一者。然而,出于这些实施例的目的,在确定例如击球角和杆头路径(如下文所定义)时选择作为参考点的点可以是在球杆面上选择的用以提供球与球杆面之间在撞击时的动态关系的指示的任何参考点。因此,无论球杆面的中心是否被选择为用于确定高尔夫球杆方向的参考点,球杆头的几何中心或球杆头的质心会被选择为参考点,确定选定参考点在撞击时相对于球的移动。击球角被定义为在撞击之前相对于地平线测量的球杆头的竖直方向,杆头路径被定义为在撞击之前相对于目标方向测量的球杆头的水平方向。类似地,所属领域的技术人员将理解,考虑到高尔夫球杆面在撞击点处的三维定向,对于发球木杆(driver)等具有明显凸起半径的球杆,跟部处的面角将与趾部的面角不同。
28.然而,出于这些实施例的目的,在确定例如动态倾角和面角(如下文所定义)时选择作为参考点的点可以是在球杆面上选择的用以提供球与球杆面之间在撞击时的动态关系的指示的任何参考点。因此,无论球杆面的中心是否被选择为用于确定高尔夫球杆方向的参考点,球在球杆面上的撞击点会被选择为参考点,确定选定参考点在撞击时相对于球的定向。动态倾角被定义为在撞击时相对于地平线所测量的球杆面上的参考点处的球杆面法线(例如,与球杆面成90度)的竖直角度,即,在撞击时球杆面上的倾角量。类似地,面角被定义为在撞击时在相对于目标方向的水平面中测量的参考点处的球杆面法线(例如,与球杆面成90度)。
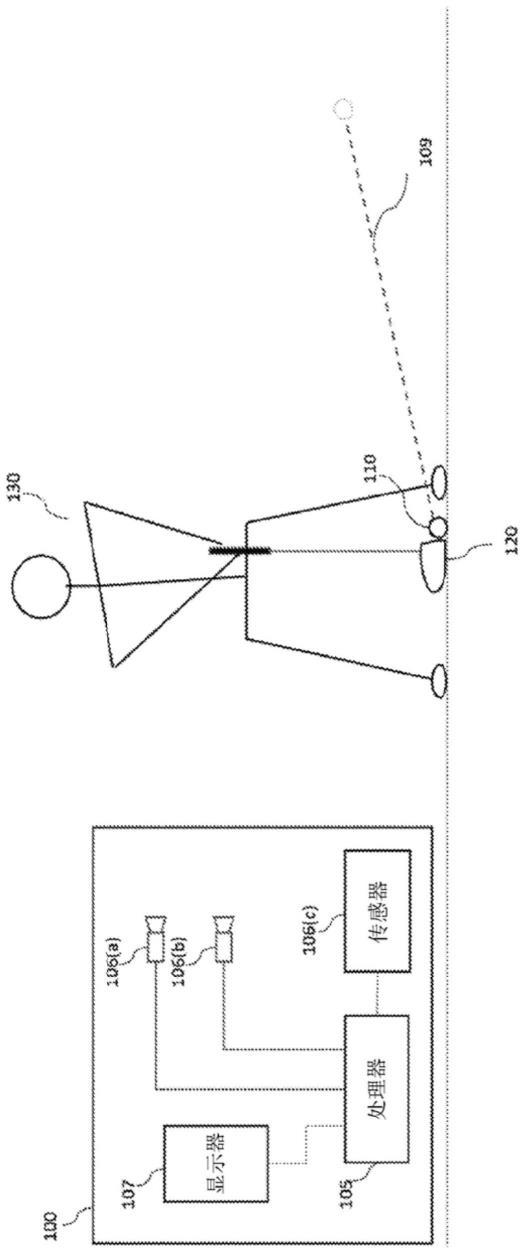
29.图1示出用于确定高尔夫球手特性以及用于标识改进高尔夫球手能力的最有效方式的第一系统100。高尔夫球手130挥动高尔夫球杆120并在球轨迹109上发射高尔夫球110。系统100含有记录挥杆和击球参数的一个或多个传感器106,如将在下文更详细地描述。
30.挥杆和击球参数包含足以预测高尔夫球的轨迹和球的大致终止位置(即,球在落地、弹跳并滚动后停止之后的最终静置位置)的球数据。这例如可通过使用基于摄像头和/或雷达的传感器系统100(或结合雷达和摄像头跟踪的系统)测量完整的球轨迹来完成,或系统100可以足以使用关于高尔夫球空气动力学和例如温度、压力、风速和方向以及地面条
件等环境条件的预定信息来实现高尔夫球轨迹的计算的准确度测量球的发射条件,例如球速、发射角度、发射方向、自旋速率和自旋轴,如所属领域的技术人员将理解。
31.除了确定高尔夫球轨迹之外,系统100还测量与所得球轨迹相关的至少一个挥杆参数,所述挥杆参数与高尔夫球手挥杆运动和/或球杆递送相关。在优选环境中,球杆递送参数包含杆头速度、杆头路径、面角、击球角、球杆面的动态倾角以及球杆面上的撞击位置。然而,高尔夫球手130的额外挥杆参数,例如球杆头、手部、肩膀、臀部、骨盆和脊柱在高尔夫球手进行挥杆期间的位置和角定向,是相关参数并且也可得以测量。这些挥杆运动参数还可用于确定作为运动学序列的一部分的线性速度和角速度,所述运动学序列对于产生既定球杆递送以及使这些动作可靠地重复来说至关重要。
32.图3示出体育用球沿着轨迹发射以及球在落地后随着其弹跳并滚动而继续行进到最终静置点的事件序列。所述序列开始于高尔夫球手的手臂、腿、肩膀等的移动,高尔夫球手通过所述移动以某一定向、方向和速度将球杆头递送到球。响应于高尔夫球手的移动的球杆头移动还受到高尔夫球杆的构造(例如,球杆头的质量、杆身(shaft)的长度和刚度)的影响。因此,球杆头的球杆面撞击球,使得球在初始球发射条件下发射,然后以空气动力学方式在空气中飞行,直到在某些落地条件(例如角度、速度和自旋速率)下撞击地面,并且取决于草皮条件(例如,硬度、撞击区域与水平面的角度等),球会弹跳和/或滚动到其最终静置位置。
33.在系统100中,传感器106可包含例如摄像头106(a-b)和/或雷达106(c),但如所属领域的技术人员所理解,可包含能够测量球轨迹和球杆递送的任何击球参数和/或挥杆运动参数的任何传感器或不同类型的传感器组合,包含例如激光雷达、超声波、声学或磁性传感器、加速度计等。一些参数还可基于来自附接到高尔夫球手130、高尔夫球杆120、高尔夫球110的传感器或此类传感器的任何组合的数据来确定。然而,在可能时,传感器106对于高尔夫球手来说是无接触的并且不需要修改高尔夫球杆或球,以便于高尔夫球手使用。
34.系统100包含记录并分析由传感器106感测到的挥杆和击球参数的处理器105。处理器105基于记录的参数和与高尔夫球手的表现相关的存储数据(如果已产生了任何数据)来确定高尔夫球手特性(例如,与高尔夫球手的挥杆和击球特性相关的历史数据),产生或更新高尔夫球手的基准测试,并向高尔夫球手建议旨在改进基准测试的改进。基准测试结果可例如通过显示器107呈现给高尔夫球手,但也可通过音频装置、电子或打印报告或任何其它合适的输出方式来递送。
35.高尔夫球手的基准测试通常针对特定的球杆类型(例如,6号铁杆),但也可能是针对高尔夫球手击打的所有球杆类型或如木杆、混合杆、铁杆、长铁杆、短铁杆或挖起杆(wedge)等一组球杆的一般基准测试。通常,对于高尔夫球手,基准测试不会因球杆类型与球杆类型的不同(例如6号铁杆和7号铁杆)而有显著差异,因此在基准测试之前组合群组中的球杆类型可以是合乎需要的,因为这将减少数据存储和处理要求,并允许更高效的系统操作。
36.如所属领域的技术人员将理解,摄像头106(a-b)可在视觉频域和/或近红外或红外域中操作。摄像头106(a-b)可以是彩色的或单色的,并且可包含与其一起操作的光系统,以确保记录期间的适当照明。摄像头将通常每秒运行100到10,000帧,以记录球杆递送、挥杆运动参数和击球参数。对于用于测量高尔夫球手的手、手臂、肩膀、臀部移动等并确定挥
杆运动参数的摄像头,可使用较慢的帧速率,例如30fps,因为这些项目的移动速度比球杆头慢。
37.如所属领域的技术人员将理解,当要观测球杆头与球之间的相互作用时,高帧速率可能特别有用,因为这种撞击包含在非常短的时间帧内发生的动态元素。为了从图像中检测到与球撞击时的球杆头位置和定向,需要撞击前最少数目的帧(例如2-3帧)。这些检测需要相对于撞击时间进行充分分布,以便准确观测即将与球接触之前的球杆递送。还可使用撞击后的帧,但归因于与球以及可能与地面的碰撞,球杆头可能在撞击之后偏转到不容易与高尔夫球手的挥杆相关的另一路径。通常,假设高尔夫球手的最大球杆头速度为例如150mph,则撞击球杆前4-10帧是所要的,这继而会限制摄像头的视场以及帧速率。如果图像还用于确定发射的球的速度、方向和自旋,则通常需要类似数目的4-10帧来获得准确的球发射数据。为了确定与球的精确撞击时间,期望采用2000fps或更高的帧速率。球杆与球之间的接触时间通常为0.5ms,这意味着在2000fps下,能保证具有球与球杆头在其间接触的一个帧。
38.雷达106(c)可以是例如在多达500毫瓦eirp(有效全向辐射功率)的功率下以x波段频率(例如,10ghz)发射微波的连续波多普勒雷达,因此符合fcc和ce关于短程国际辐射器的规定。然而,在其它管辖区中,可根据本地规定使用其它功率电平和频率。在示例性实施例中,微波以例如5-125ghz之间的更高频率发射。对于较低物体速度下的更精确测量,可使用20ghz或更高频率。可使用任何类型的连续波(cw)多普勒雷达,包含相位或频率调制的cw雷达、多频cw雷达或单频cw雷达。
39.应理解,例如激光雷达的其它跟踪装置可结合可见或不可见频率区域中的辐射一起使用。当前脉冲雷达系统在跟踪雷达装置附近物体的能力方面有限。然而,物体与这些脉冲雷达系统之间必须有的距离随着时间的推移已减小,并且预期会继续减小因此,这些类型的雷达可能很快对这些操作有效,并且设想在下文描述的本公开的系统中使用这些类型的雷达。在整个应用中,基于多普勒频谱的使用来描述对象的跟踪。如将理解,这些多普勒频谱是指来自所使用的任何类型的雷达或激光雷达的多普勒频谱。
40.系统100还包含处理单元,如所属领域的技术人员所理解,所述处理单元可包含例如通过有线或无线连接数据存储装置等与传感器106通信的一个或多个处理器105,所述传感器可包含摄像头106(a-b)和/或雷达106(c)(或多个雷达装置)。在实施例中,处理器105包含与传感器106相关联的计算机。处理器还可附接用于存储代码以及历史数据的机器可读介质。处理器可以是手持装置、个人计算机、嵌入式计算机,或者还可能位于云或任何其它类型的远程计算装置中。
41.图2示出根据示例性实施例的过程200。在步骤205中,高尔夫球手130进行一次或多次高尔夫击球。对于每次高尔夫击球,由系统100检测挥杆和击球参数并在步骤210中记录。接着在步骤220中分析所记录数据以在步骤220中确定高尔夫球手130的挥杆和击球特性。处理器105可在此分析期间将某些击球标识为良好击打,并将这些良好击打击球标识为表示高尔夫球手130的潜力,同时将较不大成功地执行的击球标识为表示高尔夫球手130的错误或不佳挥杆。
42.通常,会根据高尔夫球手在其可在良好击打球时能将球击多远以及多高效方面的能力以及他们重复这种类型的良好击打击球的可靠性来评估高尔夫球手。因此,当在步骤
220中确定高尔夫球手的特性时,对于分析的一部分(例如,在确定特定击球类型的重复性水平时),将使用所有击球,而对于其它分析(例如,评估向球传递力量的效率),可能会忽略某些击球(例如,被标识为不良击打的击球)。优选的是,将步骤220中确定的高尔夫球手特性与高尔夫球手共享。这可能会采用如下形式:“您以中等高度轨迹的从左到右的曲线将球击出158m的起落点距离。您50%的击球落在目标线路的右侧”。这也可如图5所示以图形方式示出。
43.虽然优选根据系统100的测量来确定高尔夫球手的特性,但高尔夫球手的特性也可由用户输入,例如“用我的6号铁杆时,我的杆头速度通常为80mph,击球形状通常为高右曲球,并且我的距离为150m”。
44.系统100还可在执行击球分析时并入来自高尔夫球手的输入。在步骤218中,高尔夫球手可输入意图,例如,高尔夫球手可输入击到特定距离、特定击球形状(例如,左曲球(draw)、右曲球(fade)或直球(straight))、特定高度(例如,低、中或高)或特定自旋速率(例如,低、中或高)的意图或此类意图的任何组合。如果没有可用的高尔夫球手意图218,系统100可例如将使用同一球杆以与先前良好击打击球相同的距离落在目标线路上的可重复的良好击打击球假定为意图。
45.高尔夫球手130还可能具有影响高尔夫球手的能力的限制(例如,灵活性降低、强度降低等)。这些可在步骤219中输入到系统100。这些限制还可能与关于高尔夫球手的身高、臂长和腿长以及整个身体尺寸的信息相关。
46.在步骤215中,高尔夫球手130可输入关于他/她正在使用的设备的细节,例如球杆类型(例如,发球木杆、3号木杆、2号混合杆、7号铁杆、54度挖起杆等)、杆身弹性度(例如,常规、柔软、坚硬、超坚硬)和/或球信息(例如,场地球(premium ball)、双层球(2pieces ball)、练习场球(range ball)等)。信息还可包含更详细的信息,例如球杆头质量、静态倾角、重心位置、惯性矩、恢复系数、底角;杆身长度、重量、弹性度属性、握把类型;和/或球重量、恢复系数、摩擦性质等。
47.系统100还可基于来自传感器106的数据而在步骤215中自动确定设备信息。例如,可通过基于例如使用基于机器学习的网络或其它类型的分类技术进行的分类从传感器106(a-b)获得的图像中标识设备来确定球杆类型或至少球杆类别(例如,发球木杆、木杆、混合杆、铁杆、挖起杆或推杆(putter))。
48.基于在步骤220中确定的高尔夫球手特性、在步骤215中确定的任何设备细节和在步骤218中输入的任何高尔夫球手意图信息以及在步骤219中输入的任何高尔夫球手限制,处理器105在步骤230中确定最优然而高尔夫球手可实现的击球参数以及与此类最优击球相关联的球杆递送和挥杆运动参数。在确定高尔夫球手可实现的内容时,系统100可包含关于高尔夫球手的挥杆的哪些方面比其它方面更容易改变的先验知识。
49.例如,改变面角、球杆面上的撞击位置、高尔夫球手的击球角或杆头路径可能相对容易,而改变杆头速度可能更困难。对实施某些改变的难易程度的这种排序将影响系统100产生的建议,下文将更详细地描述。如所属领域的技术人员所理解,系统100可基于高尔夫球手挥杆的任何方面的改进空间量来调整这些特性的校正容易度(即,当高尔夫球手实施建议并且当前挥杆特性与可实现的最优情况之间的差异减小时,对其它特性的改变可被列为更有希望的)。
50.在步骤235中,系统100访问所存储信息的数据库,以确定高尔夫球手的最优击球。例如,系统100可在步骤235中从数据库中检索与如何在给定杆头速度下以与步骤220中针对高尔夫球手确定的特性尽可能密切匹配的击球形状高效地击球相关的信息。此数据库可例如包含与来自职业高尔夫球手的数千次击球相对应的数据,和/或可包含适于通过调整参数以匹配在步骤220中确定的高尔夫球手特性来尽可能密切匹配当前高尔夫球手的人工模型高尔夫球手。在步骤230中,通过使用神经网络来标识数据库235中存储的许多最优轨迹(例如,包含关于使用不同种类设备的多个高尔夫球手的多次击球的数据)中的哪一个最优轨迹最密切匹配在步骤220中确定的高尔夫球手特性,或基于习得的关于在步骤220中确定的高尔夫球手特性的情况下最容易实现的最优轨迹的已知历史数据(例如,基于对被标识为具有类似相关特性的高尔夫球手的表现改变的分析,其中所述表现改变遵循针对类似起点的具体练习建议等),可确定高尔夫球手的最优击球。
51.被标识为最优的轨迹可能取决于人类不可能有效考虑的许多因素。例如,对于发球木杆击球,最优球轨迹通常被认为是最大化从球的发射位置到最终静置位置的距离同时最小化球的最终位置远离目标线路的扩散的球轨迹。然而,一些球手可能希望将起落点距离(carry distance)(例如,从发射位置到球第一次接触地面的点的距离)的值设置得比到球的最终静止位置的距离更高。此偏好可由用户输入。
52.最终静止位置的最优轨迹将取决于草皮条件而变化。对于非常硬的草皮条件,最长的最终静止位置通常与飞行较低并且由此与最大化起落点距离的较高球轨迹相比落地角更浅的轨迹相关联。发球木杆的最优轨迹还将取决于环境条件。与较低海拔的最优轨迹相比,在空气密度较低的较高海拔,最优轨迹将通常具有较高的发射角度。另外,风力条件将对最优轨迹产生影响。当在林克斯球场(links courses)打球时,风力通常极强。这使得在空气中的时间较短、顶点高度较低、其中风速通常较低的较低球轨迹更优选。然而,当在树木限制影响球的风速的公园球场中打球时,较高球轨迹可能更优选。发球木杆以外的球杆类型的目的以及由此最优轨迹未必要优化击球距离。
53.例如,利用其它的这些球杆类型的击球类型主要用以在高尔夫球手高挥杆(full swing)时将球打到一定距离,以达到某一目标区域并控制球的终点。取决于击球距离(例如,从球的当前位置到球的所要最终静置位置的距离)以及草皮和环境条件,高尔夫球手的最优轨迹会有所不同。例如,如果果岭非常柔软,则优选具有高的球轨迹,因此弹跳和滚动的量会被最小化。另一方面,如果果岭非常硬,则通常优选在果岭外部落球,让球弹跳滚动到果岭上。限定什么是定义最优击球的最优轨迹是一个非常复杂的问题,通常涉及许多复杂的计算,要考虑与高尔夫球手、设备、环境和草皮条件等相关的许多变量,这对于人来说是不可能做到的。
54.当在步骤240中确定高尔夫球手表现的基准时,通常考虑两个不同方面:1)与230中确定的最优击球(这在图5-6中称为轨迹得分)相比,高尔夫球手的实际击球形状(例如,可能省略如上文所描述的不良击打击球);以及2)高尔夫球手能够执行相同击球的可重复性(这在图5-6中称为精确度得分)。步骤230中确定的最优高尔夫击球极可能与步骤220中确定的高尔夫球手特性对应的最优高尔夫击球不同。例如,如果高尔夫球手使发球木杆持续撞击球杆面的跟部,不仅球速将低于最优速度,高尔夫球手特性中反映的高尔夫球手击球的实际形状也可能会因为跟部撞击位置所致的所谓的水平齿轮效应而成为右曲球击球,
而最优击球形状可能是直球击球。基准测试还可包含反映高尔夫球手始终使球落在目标上或目标区域内的能力的评分。
55.图5示出在显示器107上提供给高尔夫球手的反馈的示例。在这种情况下,高尔夫球手的表现的基准测试反映在两个参数上——轨迹和精确度。此外,示出最优轨迹和起落点距离/总计数目接近实际轨迹和起落点距离/总计数目。最后,示出分散图,所述分散图在此示例中指示更多击球偏向目标的右侧而非左侧。
56.基于在步骤220中确定的高尔夫球手特性和在步骤230中确定的高尔夫球手的最优击球,挥杆模型245被校准为高尔夫球手的挥杆运动和球杆递送特性。然后,处理器105通过在挥杆模型中调整所有参数和/或可能的挥杆改变来分析潜在改进250,以确定哪些参数将对高尔夫球手的表现的基准测试产生最大的积极影响。然后,针对每个参数或挥杆改变——同时可能还考虑高尔夫球手更容易实现的改变——来比较基准测试表现的潜在改进。然后,可在步骤250中将建议改进的结果呈现给高尔夫球手,如图6中所示。建议的改变可包含(a)仅具有最大积极影响的改变;(b)对基准具有积极影响的所有改变;或(c)对基准具有积极影响的一个或多个选定改变。
57.在图6中,给出轨迹得分和精确度得分两者。因此,当确定总体潜在改进时,将两个得分组合。可通过多种方式完成此组合。简单的方法是给予两个得分类似的权重。这意味着总表现得分可以是两个得分的总和或平均值。还可以或替代地完成具有更多或不同子得分的其它评分机制。然而,为了能够对改进建议进行排序,优选将子得分组合为总得分。
58.或者,多个改进类别中的每一者可具有其自身的评分机制。例如,一个类别可以是仅使用轨迹得分进行排序的效率/轨迹,而另一类别可以是仅使用精确度得分进行改进排序的精确度。然后,高尔夫球手可根据这些类别决定要改进哪个比赛方面。
59.当在步骤250中确定建议时,可考虑高尔夫球手实现参数或挥杆的所建议改变所需的预期相对工作量。另外,可由系统100自动地或由高尔夫球手130从分析中省略一些改变。例如,高尔夫球手可决定省略设备改变,或者,反之亦然,高尔夫球手可要求仅查看关于设备改变的建议。后者通常由专业装配指导者完成。
60.在步骤250中确定建议改进的替代方法可以是其中在步骤245中,通过人工智能系统基于在过去具有类似挥杆运动或球杆递送失误的多个高尔夫球手的历史数据以及他们随着时间的推移改进的程度和速度和他们为改进所做的改变来确定挥杆模型。随着系统记录和使用越来越多的数据,此类系统的有效性将随着时间的推移而提高。
61.向高尔夫球手建议的改进可产生在步骤260中确定的个人重点训练计划以用于改变特定参数或挥杆移动。在步骤260中确定的训练计划可由步骤265中针对不同设备的建议来补充,所述不同设备例如另一类型的球杆或具有不同倾角或在其它方面不同的规格的球杆,如所属领域的技术人员将理解。所述建议还可包含在步骤268中针对已知对高尔夫球手展示的挥杆失误具有积极影响的个人练习的建议。
62.本发明的实施例的另一方面使用球手特性和建议来向高尔夫球手建议对高尔夫球手的球杆组——所谓的球具组
‑‑
的改变。高尔夫规则允许球手最多玩14支球杆。然而,存在多于14种球杆类型可用。因此,每个高尔夫球手都必须确定要携带的球杆类型(例如,发球木杆、木杆、混合杆、铁杆、挖起杆、推杆),并为每个选定球杆选择球杆规格(例如,倾角、长度、重量等)。通常,在哪些距离从木杆切换到混合杆以及从混合杆切换到铁杆的决定基
于感觉。基于在步骤220中确定的高尔夫球手特性、在步骤235中从数据库中检索到的信息以及在步骤245中确定的挥杆模型,系统100可针对各种距离向高尔夫球手建议对高尔夫球手的球杆的改变和/或球杆选择,以最大化在步骤240中在高尔夫球手的所有球杆中确定的基准表现。在这方面,系统100可使用关于在典型的一轮高尔夫期间每个球杆击出的预期击球数目的信息。
63.高尔夫球手通常会考虑利用一些间隙击出某一距离的能力,例如,高尔夫球手可能更喜欢让相邻球杆之间在起落点距离上相隔10m,以便进行高挥杆。然而,从发球木杆距离下至高抛挖起杆(lob wedge)等最短球杆的所有14个球杆通常都不可能做到这一点。通常,高尔夫球手更喜欢上至最长铁杆以及可能最长的混合杆等球杆之间的间隔为10m,然后为其余的更长球杆选择更大的距离间隔。系统100可利用类似逻辑来确定球具组。
64.即使高尔夫球手没有击出他/她的所有球杆,也可产生此球具组建议。实际上,在系统100只分析了很少击球之后,就可产生球具组
‑‑
即使这些击球都使用单一的球杆类型也如此。这是可能的,因为高尔夫球手击例如6号铁杆的方式将非常类似于高尔夫球手击4号铁杆或9号铁杆或发球木杆和挖起杆等其它球杆的方式。这是因为,除了推杆和短切击球之外,执行几乎任何类型的高尔夫击球的身体运动基本上是相同的。在图9中,示出男性巡回职业高尔夫球手的球杆递送、球发射和飞行数据的平均值。据观察,相邻球杆的球杆递送和球发射数据极相关,这表明有可能基于另一球杆的数据预测一个球杆的球杆递送和球飞行细节。已发现,业余高尔夫球手在很大程度上也是如此。然而,通常适当的球具组分析涉及发球木杆和一个或多个铁杆的击球。
65.然而,本公开的另一方面是使用高尔夫球手挥杆运动和球杆递送特性的数据库来确定某个特定设备是否会对高尔夫球手的比赛产生积极影响。这可用来标识将对具有某些共同的挥杆特性的高尔夫球手有用的球杆。例如,考虑到这些高尔夫球手的挥杆特性,可能会将某个产品标识为对所述高尔夫球手的表现产生积极影响。
66.在图7中,示出了示例性实施例的实施示例。在图7中,所有的圆圈表示测量值、参数或性质,而矩形框是从给定的输入集产生输出的算法、过程或网络。
67.图7包含图3所示的高尔夫球手挥杆到球轨迹的逻辑序列的完整模型的示例。一些实施例重仅使用图7所示模型的部分。
68.图7示出包含挥杆模型(sm)330的实施方案300,所述挥杆模型可根据挥杆运动310和球杆挥杆性质(pcs)320计算球杆递送(c)311。图7还包含碰撞模型(cm)331,其可根据球杆递送311、球杆碰撞性质(pcc)321和球碰撞性质(pbc)322计算球发射条件(l)312。然后,球飞行模型(bfm)332根据球发射条件312、球空气动力学性质(pba)323和例如风速和方向、空气密度、温度和气压等环境条件(ce)324来计算球轨迹(t)313。然后,弹跳和滚动模型(brm)333根据球轨迹313——尤其是落地速度、落地角度和落地自旋速率,以及草皮条件(ct)325——计算球的最终静止位置(f)314。
69.在下文中,将描述各种实施例。从以上不同模型的描述可清楚地看出,可通过使用所描述的模型或直接测量参数来实现实施例的多个变型。例如,显而易见的是,如果知道球发射条件312,则不需要直接确定或测量球轨迹313和最终静止位置314,因为球轨迹313和最终静止位置314可使用球飞行模型332以及弹跳和滚动模型333以合理的准确度计算。在一些实施例中,与直接测量参数相比,优选使用模型332、333,而在其它实施例中优选测量
参数。
70.本实施例中的第一步是用于产生高尔夫球手特性(gc)315的挥杆表征(sc)340。这通常通过记录数个击球的挥杆运动310和/或球杆递送311数据来完成。另外,球发射条件312、球轨迹数据313和球的最终静止位置314还可用于相同的击球。过程可包含对良好击打击球和不大良好击打击球或不良击打击球进行智能过滤。
71.在一个示例中,高尔夫球手特性315如下描述:“6号铁杆为82mph杆头速度,击球角-3.2度,面到路径为-3度,杆头路径 1.4度”。
72.挥杆表征340还可包含例如在标准偏差或90%置信区间或其它统计描述方面来描述的高尔夫球手的变化性的统计描述。在一些实施例中,可能还期望对未能良好击打的击球进行表征。一般来说,相比于略微提高其良好击球,精英高尔夫球手更乐于从其比赛中消除不良击球。因此,这些高尔夫球手可能特别感兴趣的是那些未能良好击打的击球的挥杆动作和球杆递送的表征。
73.为了确定高尔夫球手的最优击球316,执行击球优化350。击球优化350使用高尔夫球手特性315作为输入。高尔夫球手特性315既可根据挥杆表征340确定,也可基于用户输入特性(uic)341或其它预定方法。自然地,高尔夫球手特性315可以是挥杆表征340和用户输入特性341的组合。
74.当确定最优击球316时,系统100可使用用户意图(ui)345。用户意图345可表达为所要的击球类型(例如,优选的击球形状,例如高击球、低击球、右曲球、左曲球等)的用户意图,或例如特定起落点距离或落地范围、自旋速率等其它特性。
75.击球优化350还可使用球发射条件312、球轨迹313和/或最终静止位置314。如上文所描述,这些内容可取决于可用的测量值而从碰撞模型331、球飞行模型332以及弹跳和滚动模型333中计算出来。
76.可以多种方式表示最优击球316。所述最优击球可用描述以下内容的参数来表达:最优挥杆运动sopt;球杆递送copt;球发射条件lopt;球轨迹topt;和/或最终静止位置fopt。在优选实施例中,最优击球316由最优球杆递送copt和最优球发射条件lopt描述,例如由以下内容组成:球杆递送参数(例如,杆头速度、杆头路径、击球角、面角、动态倾角、动态底角、撞击位置等)的一个或多个最优值,以及球发射条件参数(例如,球速、发射角度、发射方向、自旋速率、自旋轴等)的一个或多个最优值。
77.在一个实施例中,击球优化350使用碰撞模型331、球飞行模型332以及弹跳和滚动模型333根据接近高尔夫球手特性315并且确定为可由高尔夫球手实现的各种球杆递送来计算各种球轨迹和最终静止位置。从许多不同的球轨迹和最优轨迹数据库中找到最接近高尔夫球手特性315的最优击球。图9中示出最优球杆递送和轨迹的示例,此图表示男性巡回职业高尔夫球手的平均水平。作为击球优化350的一部分,所述数据库可由数千个来自类似于图9所示的职业高尔夫球手的球杆递送和球发射条件组成,因此数据库涵盖了各种球杆、各种杆头速度和各种不同的击球形状。数据库还可全部或部分地替换为被配置成仅考虑高效碰撞的碰撞模型331。
78.通过将高尔夫球手的实际球发射条件312、球轨迹313和/或最终静止位置314与最优击球316的对应数据进行比较来完成基准测试360。基准测试360还可使用高尔夫球手挥杆动作310和/或球杆递送311,并与对应的最优数据进行比较。基准测试360在很大程度上
是对挥杆运动(s)310与sopt、球杆递送(c)311与copt、球发射条件(l)312与lopt、球轨迹(t)313与topt和/或最终静止位置(f)314与fopt的比较。
79.基准测试360的结果是基准317。基准317优选地以一个或多个得分q表达,这使得有可能量化基准317。在优选实施例中,计算两个得分:轨迹得分q
轨迹
,其表示高尔夫球手能够实现最优击球轨迹的程度,通常仅使用高尔夫球手的良好击中击球;以及精确度得分q
精确度
,其表示高尔夫球手能够使球止于既定目标处的程度,通常使用高尔夫球手的所有击球。
80.在高尔夫球手每次都能重复最优击球的极端情况下,则基准得分将是最大的,就像图5和6中视标度而定的100分一样。
81.高尔夫球手的基准得分317还可用于对高尔夫球手进行分类。在图8中,根据实现的轨迹和精确度得分对高尔夫球手进行分类。这种分类可针对所有高尔夫球手的球杆、针对若干高尔夫球手完成,或者可细分为具有类似杆头速度的高尔夫球手。这种类型的高尔夫球手分类可有助于理解什么类型的服务或产品将有利于哪种类型的高尔夫球手。
82.为了确定针对高尔夫球手的建议改进370,测试确定球轨迹和最终静止位置的所有各种参数,以确定每个参数或任何参数组合对基准得分317的影响程度。例如,这可通过将每个参数从高尔夫球手的实际值调整为对应于最优击球316的值并计算基准得分317的改变来完成。这可在高尔夫球手的所有击球或高尔夫球手的击球子集上完成。要测试的参数可包含例如高尔夫球手的挥杆运动s或球杆递送c、球杆挥杆性质pcs、球杆碰撞性质pcc和/或球碰撞性质pbc。
83.在数学上,用于确定建议的计算可通过计算dq/dp来完成,其中dq是当将参数(或参数组)p从实际值改为高尔夫球手的对应于最优击球316的个人最优值popt(dp=popt-p)时基准得分q 317的改变。
84.所有对基准得分317有积极影响(dq》0)的参数改变均可被建议。然而,在优选实施例中,根据预期每个参数改变将提高基准分数317的程度来对建议进行排序。在一个实施例中,仅建议对基准得分317提供最大提高的改变——“哪一项改变将产生最大影响
‑‑
最划算”。
85.建议可能会被过滤,以仅示出某一类别内的改变,例如挥杆运动或球杆递送改变,而不建议其它方面的改变,例如设备的改变。建议也可能仅限于示出设备参数改变,如球杆身规格、球杆头型号规格、球型规格等的改变。后一种情况是典型的装配阶段,其中设备在高尔夫球手实际挥动高尔夫球杆时装配到高尔夫球手身上。
86.建议可能类似于图6示例中所示的建议,其中“自旋倾角”已被标识为影响最大的参数,所述参数如果达到最优将最大程度地增加基准得分317。在图6中,还提出了影响较小但仍具有明显积极影响的建议(例如,改变挥杆方向、撞击位置等)。改进“自旋倾角”等特定参数的建议可与最优值和可接受范围(例如,自旋倾角需要在 -1度范围内为25.5度)相关联,所述可接受范围反映高尔夫球手一致性以及测量公差的自然变化性。也可调整可接受范围,以反映高尔夫球手的技能水平。
87.应注意,改进特定参数的建议可能涉及改变高尔夫球手实现的参数平均值,但也可能涉及减少参数的变化性,即使高尔夫球手实现的平均实际值等于最优值也如此。最常见的是,建议改进平均值和变化性两者。
88.建议的示例可以是将高尔夫球手利用发球木杆的击球角从平均0度改为平均 5度。系统可能会进一步计算这种改变带来的预期改进。例如,系统可计算出:如果特定缺陷被消除或最小化,则高尔夫球手可实现11码的增大起落点距离和5个点的基准得分317提高(例如,基于0到100的标度)。高尔夫球手遵循建议的这种动机无法由指导者或教练提供,而是需要具有处理器的一种系统,所述处理器能够进行所有必要的计算以例如处理所述高尔夫球手以及还可能数百个其他高尔夫球手的许多击球。
89.额外实施例向用户提供无法从人类教练获得的独特输出。例如,高尔夫球手挥杆的视频上可叠加数据,所述数据示出为实施挥杆改变建议而进行的不同身体部位的定位改变。例如,可更改视频(例如,通过叠加图形或单独的视频图像),从而示出脚相对于球的所要重新定位,以实现所要的击球角改变或示出肩部或肘部要遵循的新路径以实现另一所要改变。还可记录由系统100如此建议的改变,并且用此信息标记数据,使得后续表现改变可与挥杆改变建议相关联。所属领域的技术人员将理解,系统100还可测量并记录与球手的后续高尔夫击球相对应的数据,以测量高尔夫球手实际实施这些建议的挥杆改变的程度。这些数据还可与挥杆改变建议相关联,并且与高尔夫球手随着时间推移测得的表现改变相关。
90.如所属领域的技术人员应理解,这使得能够建立其中有来自具有各种生物计量和挥杆特性的各种高尔夫球手的多次击球的数据库,使得可训练神经网络,以便更准确地标识最有可能引起特定高尔夫球手改进的改变以及量化与给定建议的实施相关联的潜在改进。例如,接收到图6所示数据的高尔夫球手可实施建议的改变,并且测量和记录高尔夫球手的后续表现改变(同时还记录高尔夫球手响应于建议的实际物理挥杆改变)。
91.系统100还可跟踪向高尔夫球手建议的相关联重点练习的时间和结果。然后,将此数据存储在数据库中,并且用于此高尔夫球手和接收到相同或类似建议的所有其他球手(或具有例如一个或多个共同的选定特性的高尔夫球手的任何选定子集)的数据随后可用于训练神经网络,所述神经网络将预测结果与实际获得的结果进行比较。这将允许神经网络标识出指示由于任何建议而产生积极改变的较大或较小潜力的高尔夫球手特性,并改进所建议改变以及它们对特定高尔夫球手比赛的相关联潜在影响的排序和量化。另外,通过回顾重点练习数据,神经网络可标识出呈现对于任何给定高尔夫球手更有效或不大有效的特定练习方案的高尔夫球手特性。
92.所属领域的技术人员还应理解,实施例不必一直进展到标识针对有价值的重点练习的特定建议。系统100基于上述分析仅标识一个或多个最具影响力的改变,例如击球,高尔夫球手或教练可选择某个方式来进行这种改变以提高练习的效率。如果此类系统随后能够向高尔夫球手提供关于最优击球轨迹的数据,则这将更有价值,因为高尔夫球手随后将了解到所建议的改进将带来的球飞行的实际改变。最后,系统可基于最优击球计算如上文所描述的基准,以提供人类无法计算的更多数据。
93.所属领域的技术人员应理解,实施例的系统组合并分析各种参数,并且产生以前无法获得的由许多因素的微妙相互作用产生的数据,以允许体育运动员以无法通过人类建议和训练提供者使用的新颖方式来理解可通过不同的动作过程获得的定量结果。此外,所属领域的技术人员应理解,由雷达和基于图像的体育用球跟踪系统类型产生的大部分这种数据以及可示出单个高尔夫球手的表现改变的历史数据可用于训练神经网络,从而以远超
人类大脑能力的方式梳理大量变量之间的关系以产生全新类别的数据。可在不脱离本发明范围的情况下对实施例进行各种改变,所述范围旨在仅受所附权利要求书限制。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。