1.本发明涉及盲人学习技术领域,特别涉及一种盲人康复培训系统。
背景技术:
2.随着社会的进步,为了保证残障人士的生活质量,很多盲校或社区等均有针对盲人的学习项目,例如组织盲人进行舞蹈、武术或太极拳等项目的学习,在生活中,教导盲人学习时,大多数采用人工教学,需要人工帮助盲人做出相应的姿势,然后盲人经过反复的练习才能学会,不仅费时费力,盲人学习起来也有很大的困难。
3.公告号为cn211479492u的中国实用新型专利提出了一种适用于视力障碍者的动作姿态教具,包括底座和人体模型,底座的底面为平面,且底座的至少一个侧面上设置有盲文区,人体模型安装于底座的顶面,人体模型具有与盲文区中所刻盲文相匹配的姿态,该专利虽然能够使盲人自主学习,提高学习效率,但是该专利只有触摸一种培训方式,盲人学习起来仍存在困难,同时该专利不能对盲人的学习效果进行检测,不能提供多种教学方式,盲人的学习效率仍然不高,盲人需要站立进行学习,盲人学习起来比较辛苦。
技术实现要素:
4.针对上述技术问题,本发明提供一种盲人康复培训系统,包括用于放置模型的模型放置组件、用于扫描模型信息的扫描组件、用于支撑盲人的支撑组件和用于检测的检测组件,所述模型放置组件包括模型放置单元和升降单元,所述升降单元安装在模型放置单元上,所述模型放置单元上设置有用于培训的模型,模型放置单元外接有电脑,所述扫描组件包括支撑架一和扫描单元,所述支撑架一安装在模型放置单元上,所述扫描单元安装在支撑架一上,所述支撑架一上设置有用于播报模型信息的播音器,所述支撑组件包括支撑单元和调节单元,所述支撑单元安装在模型放置单元上,所述调节单元安装在支撑单元上,所述检测组件包括支撑架三、轨道板和检测单元,所述支撑架三安装在模型放置单元上,所述轨道板安装在支撑架三上,所述检测单元安装在轨道板上,所述检测单元包括摄像机、支撑座三、动力机构、齿轮驱动机构和限位机构,所述支撑座三安装在轨道板上,所述动力机构、齿轮驱动机构和限位机构均安装在支撑座三上,所述摄像机安装在齿轮驱动机构上,所述限位机构和齿轮驱动机构均与动力机构连接,所述动力机构和轨道板连接,动力机构通过带动支撑座三运动,进而带动齿轮驱动机构运动,动力机构通过齿轮驱动机构驱动摄像机进行检测,限位机构通过限制支撑座三的位置,进而限制齿轮驱动机构的位置,模型内设置有芯片,芯片内储存有模型信息,芯片与播音器通过线路连接,轨道板上设置有可拆卸的传感器。
5.进一步地,所述动力机构包括齿圈二、连接杆四、连接杆五、电机五、连接筒和弹簧三,所述齿圈二固定安装在轨道板上,所述连接筒转动安装在支撑座三上,所述电机五固定安装在支撑座三上,所述连接杆四安装在连接筒内,连接杆四与连接筒花键连接,所述连接杆五安装在支撑座三上,所述连接杆五上转动安装有转轮五,所述转轮五上设置有花键槽,
所述连接筒上固定安装有齿轮a,所述电机五的输出轴上固定安装有齿轮b,所述齿轮a和齿轮b啮合连接,连接杆四的一端固定安装有齿轮八,连接杆四的另一端安装有轴承,轴承上安装有连接架,所述连接架和连接杆五滑动连接,当连接杆四与转轮五分离时,齿圈二和齿轮八啮合连接,当连接杆四与转轮五连接时,齿圈二和齿轮八分离,所述弹簧三套在连接杆五上,弹簧三的一端与支撑座三连接,弹簧三的另一端与连接架连接,所述连接架和限位机构连接。
6.进一步地,所述限位机构包括齿条板、齿轮九、螺纹杆、连接板二、斜形块、导向杆三、导向杆四和磁块,所斜形块固定安装在连接架上,所述斜形块上设置有斜面,所述斜形块上固定安装有连接杆七,所述连接板二固定安装在连接杆七上,所述导向杆三和导向杆四均安装在支撑座三上,所述磁块滑动安装在导向杆四上,所述磁块和导向杆三滑动连接,导向杆四的两端均设置有电磁铁,所述磁块上固定安装有连接轮,所述连接轮和斜形块连接,所述齿条板滑动安装在支撑座三上,所述齿条板和支撑座三之间连接有弹簧二,所述齿轮九转动安装在支撑座三上,所述齿条板和齿轮九啮合连接,所述螺纹杆与齿轮九通过螺纹连接,所述螺纹杆与支撑座三通过螺纹连接,所述齿条板上铰接有连接杆六,所述连接杆六与连接板二连接,所述齿条板、齿轮九、螺纹杆、弹簧二和连接杆六均设置有两组。
7.进一步地,所述齿轮驱动机构包括连接轴、连接杆三、支撑架四、丝杠三和导向杆二,所述支撑架四安装在支撑座三上,所述导向杆二固定安装在支撑架四上,所述丝杠三转动安装在支撑架四上,所述摄像机与导向杆二滑动连接,所述摄像机与丝杠三通过螺纹连接,所述连接轴转动安装在支撑架四上,连接轴的一端安装有齿轮七,连接轴的另一端安装有转轮四,连接杆三的一端与转轮五的边缘连接,连接杆三的另一端与转轮四的边缘连接,所述丝杠三上固定安装有齿轮六,所述齿轮六和齿轮七啮合连接,轨道板上设置有多个插口,转轮五上设置有传感器。
8.进一步地,所述模型放置单元包括底座、旋转环、导向杆一、放置箱、支撑台和支撑杆一,所述放置箱安装在底座上,所述旋转环转动安装在放置箱上,所述支撑杆一固定安装在旋转环上,所述支撑台安装在放置箱内,所述导向杆一固定安装在旋转环上,所述支撑台上固定安装有电机一,所述电机一的输出轴上固定安装有丝杠一,所述丝杠一和支撑台转动连接,丝杠一通过螺纹连接有滑动座一,所述滑动座一和支撑台滑动连接,所述滑动座一上安装有放置台,所述模型安装在放置台上,所述旋转环上固定安装有支撑杆二,所述支撑杆二上固定安装有电机二,所述电机二的输出轴上固定安装有齿轮一,所述放置箱上固定安装有齿圈一,所述齿轮一和齿圈一啮合连接,所述支撑架一安装在支撑杆一上,所述支撑架三安装在导向杆一上。
9.进一步地,所述升降单元包括滑动座二、丝杠二、连接杆一、电机三和齿轮保护箱,所述齿轮保护箱固定安装在放置箱内,所述丝杠二转动安装在放置箱内,所述滑动座二滑动安装在放置箱内,所述滑动座二和丝杠二通过螺纹连接,所述丝杠二上固定安装有齿轮三,所述丝杠二与齿轮保护箱转动连接,所述电机三安装在齿轮保护箱上,所述电机三的输出轴上固定安装有齿轮二,所述齿轮二和齿轮三均设置在齿轮保护箱内,所述齿轮二和齿轮三啮合连接,连接杆一的一端与支撑台铰接,连接杆一的另一端与滑动座二铰接,所述滑动座二、丝杠二、连接杆一和齿轮三均设置有多组。
10.进一步地,所述扫描单元包括支撑座一、拉绳、支撑座二、转轮二、转轮三和扫描
头,所述支撑座一安装在支撑架一上,所述支撑座一上固定安装有电机四,所述支撑座一上转动安装有转轮一,所述电机四的输出轴上固定安装有皮带轮,所述皮带轮和转轮一之间连接有皮带,所述转轮二安装在支撑架一的上表面,所述转轮三安装在支撑架一的下表面,所述支撑座二安装转轮二上,所述支撑座二和转轮三连接,所述支撑座一上安装有气缸一,所述拉绳安装在转轮一上,所述拉绳和支撑座二连接,所述扫描头固定安装在支撑座二上。
11.进一步地,所述支撑单元包括支撑架二、支撑板一、支撑板二、转动架和弹簧一,所述支撑架二滑动安装在导向杆一上,所述支撑板二固定安装在支撑架二上,所述支撑板二上转动安装有转轴,所述支撑板一转动安装在支撑板二上,所述支撑板二上设置有导轨,所述转动架转动安装在支撑板二上,所述转动架设置有两个,两个转动架之间连接有连接板一,所述转动架上安装有弧形板,所述弹簧一设置在导向杆一上,弹簧一的一端与旋转环连接,弹簧一的另一端与支撑架二连接,所述弧形板设置有两个,弧形板上设置有多个圆球。
12.进一步地,所述调节单元包括连接杆二、齿轮四、齿轮五和气缸二,所述齿轮四固定安装在支撑板一的一侧,所述连接杆二滑动安装在导轨上,所述连接杆二上安装有齿条一和齿条二,所述齿轮五固定安装在转轴上,所述齿轮五和齿条二啮合连接,所述齿轮四和齿条一啮合连接,所述气缸二安装在转轴上,气缸二的活塞杆与连接板一铰接。
13.本发明与现有技术相比的有益效果是:(1)本发明通过模型放置组件和扫描组件使得盲人环绕模型移动,进行全方位的触摸式学习,利用非接触式射频识别(rfid)技术,将带有解说信息的芯片植入到模型中,通过播音器对该模型信息进行解说,实现非接触式学习;(2)本发明通过支撑组件能够对盲人进行支撑,同时能够调整盲人的姿势,使盲人学习起来更加的轻松;(3)本发明利用检测组件环绕盲人移动,以实现对盲人做出的姿势进行检测,将盲人做出的姿势与记录在电脑中的模型信息进行校对,检测盲人的学习效果。
附图说明
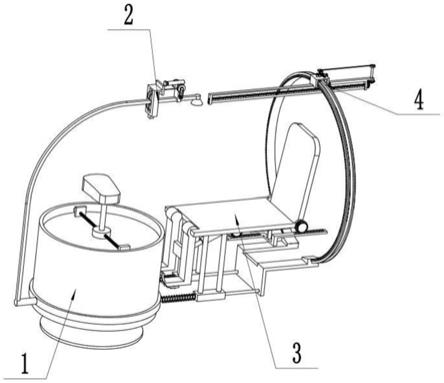
14.图1为本发明整体示意图。
15.图2为本发明局部示意图一。
16.图3为本发明图2中a处放大示意图。
17.图4为本发明模型放置组件局部切割示意图。
18.图5为本发明模型放置组件局部示意图。
19.图6为本发明图5中b处放大示意图。
20.图7为本发明局部示意图二。
21.图8为本发明图7中f处放大示意图。
22.图9为本发明局部示意图三。
23.图10为本发明支撑组件局部示意图。
24.图11为本发明检测组件示意图。
25.图12为本发明图11中c处放大示意图。
26.图13为本发明图11中d处放大示意图。
27.图14为本发明检测组件局部示意图。
28.图15为本发明图14中e处放大示意图。
29.附图标号:1
‑
模型放置组件;2
‑
扫描组件;3
‑
支撑组件;4
‑
检测组件;101
‑
底座;
102
‑
旋转环;103
‑
导向杆一;104
‑
放置箱;105
‑
支撑台;106
‑
放置台;107
‑
电机一;108
‑
丝杠一;109
‑
滑动座一;110
‑
支撑杆一;111
‑
电机二;112
‑
支撑杆二;113
‑
齿轮一;114
‑
齿圈一;115
‑
滑动座二;116
‑
丝杠二;117
‑
连接杆一;118
‑
电机三;119
‑
齿轮保护箱;120
‑
齿轮二;121
‑
齿轮三;201
‑
支撑架一;202
‑
支撑座一;203
‑
皮带轮;204
‑
皮带;205
‑
播音器;206
‑
电机四;207
‑
转轮一;208
‑
气缸一;209
‑
拉绳;210
‑
支撑座二;211
‑
转轮二;212
‑
转轮三;213
‑
扫描头;301
‑
支撑架二;302
‑
连接杆二;303
‑
齿条一;304
‑
齿轮四;305
‑
支撑板一;306
‑
支撑板二;307
‑
齿条二;308
‑
齿轮五;309
‑
转动架;310
‑
连接板一;311
‑
弧形板;312
‑
弹簧一;313
‑
气缸二;401
‑
支撑架三;402
‑
轨道板;403
‑
齿轮六;404
‑
齿轮七;405
‑
连接轴;406
‑
转轮四;407
‑
连接杆三;408
‑
支撑架四;409
‑
丝杠三;410
‑
导向杆二;411
‑
摄像机;412
‑
支撑座三;413
‑
齿圈二;414
‑
齿轮八;415
‑
连接杆四;416
‑
连接杆五;417
‑
转轮五;418
‑
齿条板;419
‑
齿轮九;420
‑
螺纹杆;421
‑
弹簧二;422
‑
连接杆六;423
‑
连接板二;424
‑
连接杆七;425
‑
斜形块;426
‑
连接架;427
‑
齿轮a;428
‑
齿轮b;429
‑
电机五;430
‑
连接筒;431
‑
弹簧三;432
‑
导向杆三;433
‑
导向杆四;434
‑
磁块;435
‑
电磁铁;436
‑
连接轮。
具体实施方式
30.下面结合具体实施例对本发明作进一步描述,在此发明的示意性实施例以及说明用来解释本发明,但并不作为对本发明的限定。
31.实施例:如图1
‑
图15所示的一种盲人康复培训系统,包括用于放置模型的模型放置组件1、用于扫描模型信息的扫描组件2、用于支撑盲人的支撑组件3和用于检测的检测组件4;模型放置组件1包括模型放置单元和升降单元,升降单元安装在模型放置单元上,模型放置单元上设置有用于培训的模型,模型放置单元外接有电脑;扫描组件2包括支撑架一201和扫描单元,支撑架一201安装在模型放置单元上,扫描单元安装在支撑架一201上,支撑架一201上设置有用于播报模型信息的播音器205;支撑组件3包括支撑单元和调节单元,支撑单元安装在模型放置单元上,调节单元安装在支撑单元上;检测组件4包括支撑架三401、轨道板402和检测单元,支撑架三401安装在模型放置单元上,轨道板402安装在支撑架三401上,检测单元安装在轨道板402上;检测单元包括摄像机411、支撑座三412、动力机构、齿轮驱动机构和限位机构,支撑座三412安装在轨道板402上,动力机构、齿轮驱动机构和限位机构均安装在支撑座三412上,摄像机411安装在齿轮驱动机构上,限位机构和齿轮驱动机构均与动力机构连接,动力机构和轨道板402连接;动力机构通过带动支撑座三412运动,进而带动齿轮驱动机构运动;动力机构通过齿轮驱动机构驱动摄像机411进行检测;限位机构通过限制支撑座三412的位置,进而限制齿轮驱动机构的位置;模型内设置有芯片,芯片内储存有模型信息,芯片与播音器205通过线路连接,轨道板402上设置有可拆卸的传感器。
32.如图1
‑
图7所示,其中模型放置单元包括底座101、旋转环102、导向杆一103、放置箱104、支撑台105和支撑杆一110,放置箱104安装在底座101上,旋转环102转动安装在放置箱104上,支撑杆一110固定安装在旋转环102上,支撑台105安装在放置箱104内,导向杆一103固定安装在旋转环102上,支撑台105上固定安装有电机一107,电机一107的输出轴上固定安装有丝杠一108,丝杠一108和支撑台105转动连接,丝杠一108通过螺纹连接有滑动座一109,滑动座一109和支撑台105滑动连接,滑动座一109上安装有放置台106,模型安装在放置台106上,旋转环102上固定安装有支撑杆二112,支撑杆二112上固定安装有电机二
111,电机二111的输出轴上固定安装有齿轮一113,放置箱104上固定安装有齿圈一114,齿轮一113和齿圈一114啮合连接,支撑架一201安装在支撑杆一110上。
33.升降单元包括滑动座二115、丝杠二116、连接杆一117、电机三118和齿轮保护箱119,齿轮保护箱119固定安装在放置箱104内,丝杠二116转动安装在放置箱104内,滑动座二115滑动安装在放置箱104内,滑动座二115和丝杠二116通过螺纹连接,丝杠二116上固定安装有齿轮三121,丝杠二116与齿轮保护箱119转动连接,电机三118安装在齿轮保护箱119上,电机三118的输出轴上固定安装有齿轮二120,齿轮二120和齿轮三121均设置在齿轮保护箱119内,齿轮二120和齿轮三121啮合连接,连接杆一117的一端与支撑台105铰接,连接杆一117的另一端与滑动座二115铰接,滑动座二115、丝杠二116、连接杆一117和齿轮三121均设置有多组。
34.如图7和图8所示,其中扫描单元包括支撑座一202、拉绳209、支撑座二210、转轮二211、转轮三212和扫描头213,支撑座一202安装在支撑架一201上,支撑座一202上固定安装有电机四206,支撑座一202上转动安装有转轮一207,电机四206的输出轴上固定安装有皮带轮203,皮带轮203和转轮一207之间连接有皮带204,转轮二211安装在支撑架一201的上表面,转轮三212安装在支撑架一201的下表面,支撑座二210安装转轮二211上,支撑座二210和转轮三212连接,支撑座一202上安装有气缸一208,拉绳209安装在转轮一207上,拉绳209和支撑座二210连接,扫描头213固定安装在支撑座二210上。
35.如图9和图10所示,其中支撑单元包括支撑架二301、支撑板一305、支撑板二306、转动架309和弹簧一312,支撑架二301滑动安装在导向杆一103上,支撑板二306固定安装在支撑架二301上,支撑板二306上转动安装有转轴,支撑板一305转动安装在支撑板二306上,支撑板二306上设置有导轨,转动架309转动安装在支撑板二306上,转动架309设置有两个,两个转动架309之间连接有连接板一310,转动架309上安装有弧形板311,弹簧一312设置在导向杆一103上,弹簧一312的一端与旋转环102连接,弹簧一312的另一端与支撑架二301连接,弧形板311设置有两个,弧形板311上设置有多个圆球。
36.调节单元包括连接杆二302、齿轮四304、齿轮五308和气缸二313,齿轮四304固定安装在支撑板一305的一侧,连接杆二302滑动安装在导轨上,连接杆二302上安装有齿条一303和齿条二307,齿轮五308固定安装在转轴上,齿轮五308和齿条二307啮合连接,齿轮四304和齿条一303啮合连接,气缸二313安装在转轴上,气缸二313的活塞杆与连接板一310铰接。
37.如图1、图7、图11、图12、图13、图14和图15所示,其中动力机构包括齿圈二413、连接杆四415、连接杆五416、电机五429、连接筒430和弹簧三431,齿圈二413固定安装在轨道板402上,连接筒430转动安装在支撑座三412上,电机五429固定安装在支撑座三412上,连接杆四415安装在连接筒430内,连接杆四415与连接筒430花键连接,连接杆五416安装在支撑座三412上,连接杆五416上转动安装有转轮五417,转轮五417上设置有花键槽,连接筒430上固定安装有齿轮a427,电机五429的输出轴上固定安装有齿轮b428,齿轮a427和齿轮b428啮合连接,连接杆四415的一端固定安装有齿轮八414,连接杆四415的另一端安装有轴承,轴承上安装有连接架426,连接架426和连接杆五416滑动连接,当连接杆四415与转轮五417分离时,齿圈二413和齿轮八414啮合连接,当连接杆四415与转轮五417连接时,齿圈二413和齿轮八414分离,弹簧三431套在连接杆五416上,弹簧三431的一端与支撑座三412连
接,弹簧三431的另一端与连接架426连接,连接架426和限位机构连接。
38.限位机构包括齿条板418、齿轮九419、螺纹杆420、连接板二423、斜形块425、导向杆三432、导向杆四433和磁块434,所斜形块425固定安装在连接架426上,斜形块425上设置有斜面,斜形块425上固定安装有连接杆七424,连接板二423固定安装在连接杆七424上,导向杆三432和导向杆四433均安装在支撑座三412上,磁块434滑动安装在导向杆四433上,磁块434和导向杆三432滑动连接,导向杆四433的两端均设置有电磁铁435,磁块434上固定安装有连接轮436,连接轮436和斜形块425连接,齿条板418滑动安装在支撑座三412上,齿条板418和支撑座三412之间连接有弹簧二421,齿轮九419转动安装在支撑座三412上,齿条板418和齿轮九419啮合连接,螺纹杆420与齿轮九419通过螺纹连接,螺纹杆420与支撑座三412通过螺纹连接,齿条板418上铰接有连接杆六422,连接杆六422与连接板二423连接,齿条板418、齿轮九419、螺纹杆420、弹簧二421和连接杆六422均设置有两组。
39.齿轮驱动机构包括连接轴405、连接杆三407、支撑架四408、丝杠三409和导向杆二410,支撑架四408安装在支撑座三412上,导向杆二410固定安装在支撑架四408上,丝杠三409转动安装在支撑架四408上,摄像机411与导向杆二410滑动连接,摄像机411与丝杠三409通过螺纹连接,连接轴405转动安装在支撑架四408上,连接轴405的一端安装有齿轮七404,连接轴405的另一端安装有转轮四406,连接杆三407的一端与转轮五417的边缘连接,连接杆三407的另一端与转轮四406的边缘连接,丝杠三409上固定安装有齿轮六403,齿轮六403和齿轮七404啮合连接,支撑架三401安装在导向杆一103上,轨道板402上设置有多个插口,转轮五417上设置有传感器。
40.本发明的工作原理为:依托3d建模,打印出模型,再结合非接触式射频识别(rfid)技术,将带有解说信息的芯片植入到模型中,将模型放置到放置台106上,启动电机三118,电机三118的输出轴带动齿轮二120转动,齿轮二120带动齿轮三121转动,齿轮三121通过丝杠二116带动滑动座二115在放置箱104内移动,滑动座二115移动时通过连接杆一117带动支撑台105在放置箱104内移动,支撑台105通过滑动座一109带动放置台106移动,启动电机一107,电机一107的输出轴通过丝杠一108带动滑动座一109在支撑台105上滑动,滑动座一109带动放置台106上滑动,进而完成对模型位置的调整。
41.模型位置调整完毕后,关闭电机一107和电机三118,初始时,支撑板一305和支撑板二306垂直,盲人坐在支撑板二306上,背靠支撑板一305,脚放在转动架309上,启动电机四206和气缸一208,电机四206的输出轴带动皮带轮203转动,皮带轮203通过皮带204带动转轮一207转动,转轮一207带动拉绳209移动,气缸一208的活塞杆推动支撑座二210,支撑座二210带动转轮二211和转轮三212在支撑架一201上移动,支撑座二210移动时带动扫描头213移动,启动电机二111,电机二111的输出轴带动齿轮一113在齿圈一114上转动,齿轮一113转动时通过电机二111带动支撑杆二112转动,支撑杆二112转动时通过旋转环102带动导向杆一103和支撑杆一110转动,支撑杆一110带动支撑架一201转动,支撑架一201转动时通过转轮二211和转轮三212带动支撑座二210转动,支撑座二210带动扫描头213转动,扫描头213对模型进行全面的扫描,并将扫描的信息传输到电脑上。
42.导向杆一103转动时带动支撑架二301转动,支撑架二301带动支撑板二306转动,进而带动支撑板二306上的盲人转动,盲人在转动时触摸模型进行学习,当学习到达设定时间后(时间自主设定),停止电机二111。
43.启动气缸二313,气缸二313的活塞杆通过连接板一310带动转动架309转动,转动架309转动时弧形板311顶到放置箱104,在反作用力下,转动架309通过支撑板二306带动气缸二313在导向杆一103上滑动,弹簧一312拉伸,转动架309转动时通过连接板一310带动气缸二313转动,气缸二313通过转轴带动齿轮五308转动,齿轮五308转动时通过齿条二307带动连接杆二302在支撑板二306的导轨上滑动,连接杆二302滑动时带动齿条一303移动,齿条一303移动时带动齿轮四304转动,齿轮四304转动时带动支撑板一305转动,从而使支撑板一305与支撑板二306平行,支撑板一305和支撑板二306平行后,盲人躺在支撑板一305和支撑板二306上,当盲人躺下后,停止气缸二313,播音器205播报模型内芯片存储的信息,盲人进行非触摸式学习,学习一段时间后(时间自主设定),停止播音器205的播报。
44.初始时,齿圈二413和齿轮八414啮合连接,连接杆四415和转轮五417分离,学习完毕后,启动电机五429,电机五429的输出轴带动齿轮b428转动,齿轮b428通过齿轮a427带动连接筒430转动,连接筒430通过连接杆四415带动齿轮八414转动,齿轮八414在齿圈二413上转动时通过连接杆四415和连接筒430带动支撑座三412在轨道板402上转动,当转动到传感器位置时(传感器位置根据盲人的位置自主设定),电机五429停止,电磁铁435通电产生磁性,电磁铁435通过磁力吸附磁块434,磁块434在导向杆三432和导向杆四433上滑动,磁块434滑动时带动连接轮436移动,连接轮436带动斜形块425上升,斜形块425通过连接杆七424带动连接板二423上升,斜形块425通过连接架426和轴承带动连接杆四415上升,连接板二423上升时通过连接杆六422带动齿条板418在支撑座三412上滑动,齿条板418带动齿轮九419转动,齿轮九419转动时带动螺纹杆420移动,使螺纹杆420插入轨道板402上的插口内,当螺纹杆420插入插口后,连接杆四415与转轮五417连接,齿圈二413和齿轮八414分离,转轮五417上的传感器感应到信号,使电机五429启动,电机五429的输出轴通过齿轮b428带动齿轮a427转动,齿轮a427通过连接筒430带动连接杆四415转动,连接杆四415带动转轮五417转动,转轮五417通过连接杆三407带动转轮四406转动,转轮四406通过连接轴405带动齿轮七404转动,齿轮七404通过齿轮六403带动丝杠三409转动,丝杠三409转动时带动摄像机411在导向杆二410上滑动,摄像机411滑动时,盲人做出学习到的动作,摄像机411拍摄下盲人做出的动作并反馈到电脑中,电脑将盲人做出的动作与模型的信息进行比对,从而对盲人的学习效果进行检测。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。