1.本发明实施例涉及可再生能源控制技术领域,尤其涉及一种换流器孤岛转联网控制方法及装置。
背景技术:
2.近年来,随着经济的快速发展,用电总负荷连年升高。在碳中和的背景下,大力发展清洁能源建设,是目前电力行业发展的一个重要方向。风力、光伏等可再生能源发电比例的升高,对于电网系统的稳定产生了新的挑战。风能及光伏资源受天气及时间因素影响,具有随机性,对电网的电压及频率稳定性、电能质量等具有多方面的不良影响,降低了电网的系统惯性,弱化了电网抗干扰能力,影响电网的安全稳定运行。
3.将传统的同步发电机的特性运用到新能源并网控制中,从而催生出虚拟同步控制技术,能够使新能源发电系统具有一定的系统惯性,实现一次调频功能,对电网频率及电压提供必要的支撑作用,能够减少区域供电对传统火力发电的依赖。虚拟同步控制的应用,增强了用户侧微网运行的稳定性,提高了电网运行的灵活性,降低区域电网的耦合,为实现系统孤岛及联网运行的快速切换奠定了基础。
4.现有技术中通常采用断路器同期合闸进行并网的策略,该策略要求断路器具有同期合闸功能,客观上增加了一次设备的成本,此外通过调整电网与系统频率差时,大的频率差会造成相角差变化较快,对于断路器的同期合闸能力要求较高,且合闸时会造成一定程度的冲击,频率差过小会造成同步时间较长。并且现有的虚拟同步控制主动准同期控制策略,利用同期合闸时进行控制模式切换,切换过程会造成必定对系统造成一定程度的冲击。由于相位超前或滞后,只是相对的概念,超前30度也可称为滞后330度,与频率的大小无对应的关系,利用pi输出调节频率的方式,在频率差较大时,调节过程中,相角差变化过快,极易引起换流器输出频率的振荡,pi参数无法适应不同的频率差范围。
技术实现要素:
5.基于现有技术的上述情况,本发明实施例的目的在于提供一种换流器孤岛转联网控制方法及装置,解决了现有技术孤岛转并网控制策略中对断路器同期合闸功能的依赖,以及现有准同期功能中模式切换的冲击问题,提高准同期控制的速度及准确性。
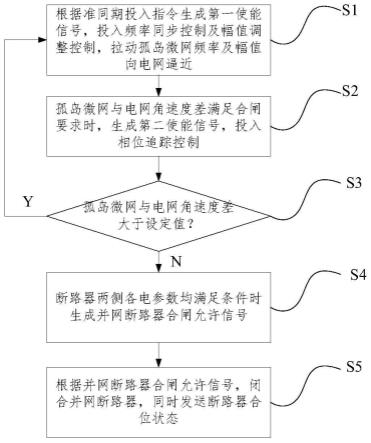
6.为达到上述目的,根据本发明实施例的一个方面,提供了一种换流器孤岛转联网控制方法,包括步骤:
7.s1、根据准同期投入指令生成第一使能信号,投入频率同步控制及幅值调整控制,拉动孤岛微网频率及幅值向电网逼近;
8.s2、孤岛微网与电网角速度差满足合闸要求时,生成第二使能信号,投入相位追踪控制;
9.s3、在相位追踪控制下,当孤岛微网与电网角速度差大于设定值时,则控制第二使能信号无效,退出相位追踪控制,跳转至步骤s1的频率同步控制;否则执行步骤s4;
10.s4、断路器两侧各电参数均满足条件时,生成并网断路器合闸允许信号;
11.s5、根据并网断路器合闸允许信号,闭合并网断路器,同时发送断路器合位状态。
12.进一步的,所述频率同步控制包括:
13.对孤岛微网角速度ωs与电网角速度ωg的差值进行pi调节,输出有功功率参考补偿p
delta
。
14.进一步的,所述步骤s2中,孤岛微网与电网角速度差满足合闸要求时,将所述频率同步控制中pi调节的输入置0并锁存该pi调节的输出。
15.进一步的,所述幅值调整控制包括:
16.对并网断路器孤岛侧电压幅值us与并网断路器电网侧电压幅值ug的差值进行pi调节,输出无功功率参考补偿q
delta
。
17.进一步的,所述孤岛微网与电网角速度差的合闸要求包括:
[0018][0019]
其中,ω
delta
为孤岛微网与电网角速度差,ω
set2
为第二角度阈值,δt1为连续满足上述条件ω
delta
<ω
set2
的时间长度,t1为设置的时间定值。
[0020]
进一步的,所述相位追踪控制包括:
[0021]
对并网断路器孤岛侧电压相位θs与并网断路器电网侧电压相位θg的差值进行pi调节,输出虚拟转子角速度补偿量ω
delta
'。
[0022]
进一步的,所述孤岛微网与电网角速度差大于设定值的条件包括:
[0023][0024]
其中,ω
set1
为第一角度阈值,δt2为连续满足上述条件的时间长度,t2为设置的时间定值。
[0025]
进一步的,所述断路器两侧各电参数均满足条件包括:
[0026][0027]
其中,ω
delta
为孤岛微网与电网角速度差,ω
set2
为第二角度阈值,θ
set
为相位阈值,u
set
为幅值阈值,δt3为连续满足上述条件的时间长度,t3为设置的时间定值。
[0028]
进一步的,所述断路器合位状态使得第一使能信号和第二使能信号无效。
[0029]
根据本发明实施例的另一个方面,提供了一种换流器孤岛转联网控制装置,包括频率同步控制及幅值调整控制模块、相位追踪控制模块、调整模块、以及并网断路器合闸模块;其中,
[0030]
所述频率同步控制及幅值调整控制模块,根据准同期投入指令生成第一使能信号,投入频率同步控制及幅值调整控制,拉动孤岛微网频率及幅值向电网逼近;
[0031]
所述相位追踪控制模块,用于当孤岛微网与电网角速度差满足合闸要求时,生成第二使能信号,投入相位追踪控制;所述调整模块,在相位追踪控制下,当孤岛微网与电网角速度差大于设定值时,则控制第二使能信号无效,退出相位追踪控制;
[0032]
所述并网断路器合闸模块,用于断路器两侧各电参数均满足条件时,生成并网断路器合闸允许信号;根据并网断路器合闸允许信号,闭合并网断路器,同时发送断路器合位状态。
[0033]
综上所述,本发明提供了一种换流器孤岛转联网控制方法及装置,包括步骤:根据准同期投入指令生成第一使能信号,投入频率同步控制及幅值调整控制,拉动孤岛微网频率及幅值向电网逼近;孤岛微网与电网角速度差满足合闸要求时,生成第二使能信号,投入相位追踪控制;在相位追踪控制下,当孤岛微网与电网角速度差大于设定值时,则控制第二使能信号无效,退出相位追踪控制;断路器两侧各电参数均满足条件时,生成并网断路器合闸允许信号;根据并网断路器合闸允许信号,闭合并网断路器,同时发送断路器合位状态。本发明实施例提供的技术方案,将并网的相位同步拆分成频率同步和相位追踪两个阶段,以先同步频率,再追踪相位的方式,将频率和相位的耦合关系减弱,降低了相位同步的难度,利用先同步频率后调节相位的方法,降低了频率和相位的耦合性,避免了以相位为单输入时传递环节过多,不易找到稳定的调节方向,减少了调节过程中对系统的扰动;通过参考值的相加及退出时的平滑操作,过程中无模式切换,所有的变化均连续,不会造成系统的阶跃和冲击。
附图说明
[0034]
图1是现有技术典型的虚拟同步控制的准同期控制功能示意图;
[0035]
图2是本发明实施例换流器孤岛转联网控制方法的流程图;
[0036]
图3是虚拟同步控制的准同期控制器的构成示意图;
[0037]
图4是平滑退出控制逻辑示意图;
[0038]
图5是辅助控制模块的逻辑框图。
具体实施方式
[0039]
为使本发明的目的、技术方案和优点更加清楚明了,下面结合具体实施方式并参照附图,对本发明进一步详细说明。应该理解,这些描述只是示例性的,而并非要限制本发明的范围。此外,在以下说明中,省略了对公知结构和技术的描述,以避免不必要地混淆本发明的概念。
[0040]
虚拟同步控制下的换流器具有自主调频的能力,可以主动调节电网频率,实现与交流电网的动态同步。现有虚拟同步控制换流器的并网主要有两种方式:一是通过调整换流器的功率输入指令,使换流器输出与电网较小偏差的频率,使断路器两端的频率差发生缓慢变化,再利用断路器的同期合闸功能,实现换流器孤岛系统的并网;二是在换流器控制环中加入准同期控制功能,通过检测并网断路器两侧交流电压,提取频率、幅值及相位等信息,作为准同期控制功能的输入,同步调整断路器两端的交流电压,待两侧电压一致后,向断路器发送合闸允许信号,手动闭合并网断路器,实现换流器孤岛向联网运行的转换。典型的虚拟同步控制的准同期控制功能示意图如图1所示。上述方案中,利用断路器同期合闸进行并网的策略,要求断路器具有同期合闸功能,客观上增加了一次设备的成本,此外通过调整电网与系统频率差时,大的频率差会造成相角差变化较快,对于断路器的同期合闸能力要求较高,且合闸时会造成一定程度的冲击,频率差过小会造成同步时间较长。并且该方式
利用同期合闸时进行控制模式切换,切换过程会造成必定对系统造成一定程度的冲击。由于相位超前或滞后,只是相对的概念,超前30度也可称为滞后330度,与频率的大小无对应的关系,利用pi输出调节频率的方式,在频率差较大时,调节过程中,相角差变化过快,极易引起换流器输出频率的振荡,pi参数无法适应不同的频率差范围。
[0041]
下面对结合附图对本发明实施例的技术方案进行详细说明。根据本发明的一个实施例,提供了一种换流器孤岛转联网控制方法,该方法的流程图如图2所示,包括如下步骤:
[0042]
s1、根据准同期投入指令生成第一使能信号,投入频率同步控制及幅值调整控制,拉动孤岛微网频率及幅值向电网逼近。频率同步控制包括:对孤岛微网角速度ωs与电网角速度ωg的差值进行pi调节,输出有功功率参考补偿p
delta
。幅值调整控制包括:对并网断路器孤岛侧电压幅值us与并网断路器电网侧电压幅值ug的差值进行pi调节,输出无功功率参考补偿q
delta
。有功功率参考值与实际值的差值,与孤岛系统输出频率具有下垂曲线的关系,从而通过调整有功的参考值,可以调节孤岛电网频率。
[0043]
s2、孤岛微网与电网角速度差满足合闸要求时,将所述频率同步控制中pi调节的输入置0并锁存该pi调节的输出,生成第二使能信号,投入相位追踪控制。其中,孤岛微网与电网角速度差的合闸要求包括:
[0044][0045]
其中,ω
delta
为孤岛微网与电网角速度差,ω
set2
为第二角度阈值,δt1为连续满足此条件ω
delta
<ω
set2
的时间长度,t1为设置的时间定值。
[0046]
相位追踪控制包括:对并网断路器孤岛侧电压相位θs与并网断路器电网侧电压相位θg的差值进行pi调节,输出虚拟转子角速度补偿量ω
delta
'。
[0047]
s3、在相位追踪控制下,当孤岛微网与电网角速度差大于设定值时,则控制第二使能信号无效,退出相位追踪控制,跳转至步骤s1的频率同步控制;否则执行步骤s4。该孤岛微网与电网角速度差大于设定值的条件包括:
[0048][0049]
其中,ω
set1
为第一角度阈值,δt
23
为连续满足上述条件的时间长度,t2为设置的时间定值。
[0050]
s4、当断路器两侧各电参数均满足条件时,生成并网断路器合闸允许信号。该条件为:
[0051][0052]
其中,ω
delta
为孤岛微网与电网角速度差,ω
set2
为第二角度阈值,θ
set
为相位阈值,u
set
为幅值阈值,δt3为连续满足上述条件的时间长度,t3为设置的时间定值。
[0053]
s5、根据并网断路器合闸允许信号,闭合并网断路器,同时发送断路器合位状态,该断路器合位状态使得第一使能信号和第二使能信号无效。
[0054]
本发明实施例提供的换流器孤岛转联网控制方法,能够实现虚拟同步控制下的换
流器孤岛与并网的平滑切换,可以通过虚拟同步控制的准同期控制器实现,图3中示出了虚拟同步控制的准同期控制器的构成示意图,该控制器主要由频率同步控制模块、相位追踪控制模块、幅值调整控制模块及辅助控制模块四部分组成。频率同步控制模块负责进行孤岛系统与电网的频率同步,其中,ωs为孤岛系统角速度,ωg为电网角速度,p
delta
为输出的有功功率参考补偿量。频率同步控制模块以电网与孤岛系统角速度的差值作为输入,经pi调节输出有功功率参考补偿,通过调节换流器的有功设定,实现系统p-f下垂曲线的平移,使系统在目标频率值时虚拟机械功率等于孤岛系统负荷功率,从而实现孤岛系统与电网的频率一致。相位追踪控制模块负责进行孤岛系统与电网的相位同步,其中θs为并网断路器孤岛侧电压相位,θg为并网断路器电网侧电压相位,ω
′
delta
为控制器输出的虚拟转子角速度补偿量。控制器以断路器两侧电压相位的差值作为输入,经pi环节输出转子角速度的微小补偿,实现虚拟同步电机定子相位的追踪,逐渐实现与电网相位的同步。使用pi控制的相位追踪控制器在相位差值起点较小时,收敛较慢,也可以采用以下方式实现相位追踪模块的功能:
[0055]
定义
[0056][0057][0058]
其中,θ
delta
(n)为当前采样时刻的相位差值,θ
delta
(n―1)为当前时刻前一个采样点的相位差值,以此类推;
[0059]
若满足条件1,则输出
[0060]
ω
′
delta
(n)=ω
′
delta
(n―1) k
·
ω
set2
[0061]
若满足条件2,则输出
[0062]
ω
′
delta
(n)=ω
′
delta
(n―1)―k
·
ω
set2
[0063]
否则输出
[0064]
ω
′
delta
(n)=ω
′
delta
(n―1)
[0065]
ω
′
delta
(n)应对应限幅―ω
set2
<ω
′
delta
(n)<ω
set2
,其中,k为频率步进系数,k<0.1。
[0066]
其中,条件1判据为
[0067][0068]
条件2判据为
[0069][0070]
幅值调整控制模块负责孤岛系统与电网的电压幅值同步,其中,us为并网断路器孤岛侧电压幅值,ug为并网断路器电网侧电压幅值,q
delta
为控制器输出的无功功率参考补偿量。控制器以电网与孤岛系统角速度的差值作为输入,经pi环节输出无功功率参考补偿,通过调节换流器的无功设定,实现系统q-v下垂曲线的平移,逐步调节并网断路器孤岛侧的电压幅值,直至与电网侧一致。频率同步控制模块和相位追踪控制模块均具有平滑退出控制逻辑,平滑退出控制逻辑示意图如图4所示:当控制器使能,平滑退出模块输出切换至1通
道,直接输出pi控制结果,当控制器退出时,输出切换至0通道,此时pi输出清零,输出将以设定斜率降低至零。
[0071]
辅助控制模块负责控制其他各控制模块的投入退出,以及准同期状态的判断。通过采集系统频率差、相位差、电压幅值差、断路器位置状态,对整个准同期合闸过程进行智能判断与逻辑切换。辅助控制模块的逻辑框图如图5所示。采用该准同期控制器实现上述实施例提供的方法过程如下:
[0072]
1、当系统下达准同期投入指令后,控制器start信号为1,逻辑判断控制器将启动信号锁存,输出en1为1,投入频率同步控制模块及幅值调整控制模块,拉动微网频率及幅值向电网逼近。
[0073]
2、当辅助判断控制模块检测到孤岛与电网角速度差满足合闸要求时,输出en2为1,将频率同步控制的pi环节输入置0,同时锁存pi环输出,投入相位追踪控制器,判断条件如下:
[0074][0075]
3、相位追踪控制模块投入后,若检测到孤岛与电网角速度大于设定值时,则输出en2为0,退出相位追踪器,释放频率同步控制器pi环输入输出,再次进入频率同步环节,并重复步骤2,步骤3判断条件如下:
[0076][0077]
4、当辅助控制模块判定,断路器两侧电压频率、幅值、相位均满足条件时,准同期控制器输出并网断路器合闸允许,qcb_cl_red为1,判断条件如下:
[0078][0079]
5、断路器收到合闸允许信号后,闭合并网断路器,同时发送断路器合位状态qcb_ind给准同期控制器,重置rs触发器,en1、en2置0,控制器有功及无功参考值补偿量定斜率降低至0,恢复至原有设定状态,系统进入并网运行稳态。
[0080]
根据本发明实施例的另一个实施例,提供了一种换流器孤岛转联网控制装置,包括频率同步控制及幅值调整控制模块、相位追踪控制模块、调整模块、以及并网断路器合闸模块;其中,
[0081]
频率同步控制及幅值调整控制模块,根据准同期投入指令生成第一使能信号,投入频率同步控制及幅值调整控制,拉动孤岛微网频率及幅值向电网逼近;
[0082]
相位追踪控制模块,用于当孤岛微网与电网角速度差满足合闸要求时,生成第二使能信号,投入相位追踪控制;所述调整模块,在相位追踪控制下,当孤岛微网与电网角速度差大于设定值时,则控制第二使能信号无效,退出相位追踪控制;
[0083]
并网断路器合闸模块,用于断路器两侧各电参数均满足条件时,生成并网断路器合闸允许信号;根据并网断路器合闸允许信号,闭合并网断路器,同时发送断路器合位状态。
[0084]
该实施例提供的控制装置中各个模块实现其功能的具体过程与前述实施例方法中的各步骤相同,在此不再赘述。
[0085]
综上所述,本发明实施例涉及一种换流器孤岛转联网控制方法及装置,包括步骤:根据准同期投入指令生成第一使能信号,投入频率同步控制及幅值调整控制,拉动孤岛微网频率及幅值向电网逼近;孤岛微网与电网角速度差满足合闸要求时,生成第二使能信号,投入相位追踪控制;在相位追踪控制下,当孤岛微网与电网角速度差大于设定值时,则控制第二使能信号无效,退出相位追踪控制;断路器两侧各电参数均满足条件时,生成并网断路器合闸允许信号;根据并网断路器合闸允许信号,闭合并网断路器,同时发送断路器合位状态。本发明实施例提供的技术方案,将并网的相位同步拆分成频率同步和相位追踪两个阶段,以先同步频率,再追踪相位的方式,将频率和相位的耦合关系减弱,降低了相位同步的难度,利用先同步频率后调节相位的方法,降低了频率和相位的耦合性,避免了以相位为单输入时传递环节过多,不易找到稳定的调节方向,减少了调节过程中对系统的扰动;通过参考值的相加及退出时的平滑操作,过程中无模式切换,所有的变化均连续,不会造成系统的阶跃和冲击。
[0086]
应当理解的是,本发明的上述具体实施方式仅仅用于示例性说明或解释本发明的原理,而不构成对本发明的限制。因此,在不偏离本发明的精神和范围的情况下所做的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。此外,本发明所附权利要求旨在涵盖落入所附权利要求范围和边界、或者这种范围和边界的等同形式内的全部变化和修改例。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。